Вам также может понравиться
- Tipos de Robots IndustrialesДокумент20 страницTipos de Robots IndustrialesJimmyCoveñasHaro100% (1)
- Ensayo RobóticaДокумент11 страницEnsayo RobóticaErik Alejandro Melendez OlguínОценок пока нет
- Qué Es Un Robot IndustriaДокумент18 страницQué Es Un Robot IndustriaOscar Antonio Flores Juarez67% (3)
- Clase 1 IntroducciónДокумент31 страницаClase 1 IntroducciónIshmael AcevedoОценок пока нет
- Definición robot industrialДокумент14 страницDefinición robot industrialFernando Trejo Huaman100% (1)
- Clasificación Del Brazo RobóticoДокумент7 страницClasificación Del Brazo RobóticoLenin Ismael Quizhpe CórdovaОценок пока нет
- Tema 3 PDFДокумент6 страницTema 3 PDFErika Pari EnriquezОценок пока нет
- Practica 0 y 1Документ13 страницPractica 0 y 1Fernando PerezОценок пока нет
- Trabajo de Investigacion - Unidad IvДокумент33 страницыTrabajo de Investigacion - Unidad IvJacke AngelesОценок пока нет
- Examen Final de RoboticaДокумент8 страницExamen Final de RoboticaPETERXDZОценок пока нет
- Robotica I ParcialДокумент4 страницыRobotica I ParcialAaron HernandezОценок пока нет
- Mecanismo RoboticoДокумент9 страницMecanismo RoboticoclintonОценок пока нет
- Definición Del Robot IndustrialДокумент9 страницDefinición Del Robot IndustrialStalin AlvarezОценок пока нет
- Robots IndustrialesДокумент8 страницRobots IndustrialesAntonio De diosОценок пока нет
- La Robotica 3ra GuiaДокумент11 страницLa Robotica 3ra GuiaFelipe Ramirez CardozoОценок пока нет
- Lab 01 CabreraДокумент15 страницLab 01 CabreraLuis Valencia EscarcenaОценок пока нет
- Robotica en La Industria y Regla de JacksonДокумент30 страницRobotica en La Industria y Regla de JacksonlorenaОценок пока нет
- Taller de Tecnología 2Документ6 страницTaller de Tecnología 2Felipe Ramirez CardozoОценок пока нет
- Foro de Robotica IndustrialДокумент15 страницForo de Robotica IndustrialArturo Tapia SolisОценок пока нет
- Tarea Investigacion (Robots)Документ7 страницTarea Investigacion (Robots)Eduardo Daniel Hernández MelladoОценок пока нет
- C9 RoboticaДокумент39 страницC9 Roboticamonica cuti magañoОценок пока нет
- Robótica IndustrialДокумент29 страницRobótica IndustrialMarvel Antonio Oviedo CasasОценок пока нет
- ROBOTICAДокумент7 страницROBOTICAyoani gonzalez herreraОценок пока нет
- Consulta RoboticaДокумент12 страницConsulta RoboticaDaniel Tirado SánchezОценок пока нет
- Cinematica y Dinamica de Un Brazo RobotДокумент15 страницCinematica y Dinamica de Un Brazo RobotSaid Jara0% (1)
- Investigación Unidad 3Документ32 страницыInvestigación Unidad 3Alex AraujoОценок пока нет
- Desarrollo de Un Sistema Experto para Un Brazo k680 SterenДокумент7 страницDesarrollo de Un Sistema Experto para Un Brazo k680 SterenArturo Octavio Vazquez TorresОценок пока нет
- Brazo Robotico IndustrialДокумент13 страницBrazo Robotico IndustrialEdwin GC100% (3)
- Robotica GeneralДокумент185 страницRobotica GeneralRomán AndrésОценок пока нет
- Resumen Examen SelecДокумент60 страницResumen Examen SelecLeo FariaОценок пока нет
- Introducción A La RobóticaДокумент19 страницIntroducción A La RobóticaCaleb Guerra GonzalesОценок пока нет
- 1.3 SubsistemasДокумент5 страниц1.3 SubsistemasYesi Salazar LimasОценок пока нет
- Unidad 4. Robotica-SernaДокумент26 страницUnidad 4. Robotica-Sernalupita sernaОценок пока нет
- Trabajo Final RobóticaДокумент24 страницыTrabajo Final RobóticaMiranda Patricio IgnacioОценок пока нет
- Robotica IiДокумент77 страницRobotica IiLu Rodriguez HuamanОценок пока нет
- ComponentesДокумент18 страницComponentesFernando Alonso Diaz HerreraОценок пока нет
- Documento LenguajeДокумент3 страницыDocumento Lenguajealexis bugos torresОценок пока нет
- Robótica educativa: tipos y aplicacionesДокумент10 страницRobótica educativa: tipos y aplicacionesDaniel AlvarezОценок пока нет
- Poliamidas - (Grupo 4)Документ5 страницPoliamidas - (Grupo 4)JULIAN DAVID MARTIN HERNANDEZОценок пока нет
- Primera ClaseДокумент12 страницPrimera ClaseClarisa Clemente RodriguezОценок пока нет
- Taller de Tecnologia Grado 10Документ3 страницыTaller de Tecnologia Grado 10XaBy Lds OrtizОценок пока нет
- Capitulo 1 Brazo (1)Документ10 страницCapitulo 1 Brazo (1)vicday2005Оценок пока нет
- PDF Taller de Tecnologia Grado 10 DDДокумент3 страницыPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueОценок пока нет
- Robots industriales y sus tiposДокумент7 страницRobots industriales y sus tiposJuanjose RamirezОценок пока нет
- Robotic AДокумент6 страницRobotic AAna Marcela Orellana NuilaОценок пока нет
- Automatizacion de Brazo RoboticoДокумент25 страницAutomatizacion de Brazo RoboticoDavid MartinezОценок пока нет
- Historia y clasificación de los robots industrialesДокумент48 страницHistoria y clasificación de los robots industrialesDavid GarciaОценок пока нет
- Guia Celulas de ManufacturaДокумент8 страницGuia Celulas de ManufacturaYazmani Leonel Franco Gutierrez100% (1)
- La Robótica y Sus AplicacionesДокумент4 страницыLa Robótica y Sus AplicacionesElvis Martinez BravoОценок пока нет
- Tipos de robots industrialesДокумент15 страницTipos de robots industrialesJonathan Martinez PilcoОценок пока нет
- 1ro SecundariaДокумент35 страниц1ro Secundariamarlo sislaОценок пока нет
- Robotica DanielДокумент12 страницRobotica DanielDaniel LugoОценок пока нет
- ROBOTICAДокумент5 страницROBOTICAvictoria stherОценок пока нет
- Definición y Clasificación Del RobotДокумент2 страницыDefinición y Clasificación Del Robotjose reyesОценок пока нет
- Robotica DanielДокумент12 страницRobotica DanielDaniel LugoОценок пока нет
- Robotica y AutomatizacionДокумент27 страницRobotica y AutomatizacionJose Bardales RodriguezОценок пока нет
- Proyecto 2Документ6 страницProyecto 2Kenny J. Muñiz BellidoОценок пока нет
- Cuestionario ResueltoДокумент12 страницCuestionario ResueltodaniОценок пока нет
- OfimaticaДокумент9 страницOfimaticaScaniaОценок пока нет
- Microsoft OfficeДокумент5 страницMicrosoft OfficeScaniaОценок пока нет
- Secado ConvectivoДокумент7 страницSecado ConvectivoScaniaОценок пока нет
- Concentrados de FrutasДокумент10 страницConcentrados de FrutasScaniaОценок пока нет
- Plan Estratégico de La Cooperativa CenfrocaféДокумент5 страницPlan Estratégico de La Cooperativa CenfrocaféScaniaОценок пока нет
- Guía completa para crear un plan estratégico de empresa exitosoДокумент1 страницаGuía completa para crear un plan estratégico de empresa exitosoScaniaОценок пока нет
- Plan Estratégico de La Cooperativa CenfrocaféДокумент5 страницPlan Estratégico de La Cooperativa CenfrocaféScania100% (1)
- Concentrados de FrutasДокумент10 страницConcentrados de FrutasScaniaОценок пока нет
- Compañía Peruana de Estudios de Mercados y Opinión Publica CpiДокумент1 страницаCompañía Peruana de Estudios de Mercados y Opinión Publica CpiScaniaОценок пока нет
- Concentrados de FrutasДокумент10 страницConcentrados de FrutasScaniaОценок пока нет
- Informe Control de CalidadДокумент6 страницInforme Control de CalidadScaniaОценок пока нет
- Cenfrocafe PDFДокумент46 страницCenfrocafe PDFVerónica UriarteОценок пока нет
- Introduccion de La LecheДокумент1 страницаIntroduccion de La LecheScaniaОценок пока нет
- Higiene de CarnesДокумент2 страницыHigiene de CarnesScaniaОценок пока нет
- Informe Control de Calidad - Ing JulioДокумент20 страницInforme Control de Calidad - Ing JulioScaniaОценок пока нет
- Exposicion de LecheДокумент28 страницExposicion de LecheScaniaОценок пока нет
- Higiene de CarnesДокумент2 страницыHigiene de CarnesScaniaОценок пока нет
- El ColágenoДокумент3 страницыEl ColágenoScaniaОценок пока нет
- Cuánto Tarda El Plástico en DescomponerseДокумент1 страницаCuánto Tarda El Plástico en DescomponerseScaniaОценок пока нет
- Pregutas Grupo 1Документ4 страницыPregutas Grupo 1ScaniaОценок пока нет
- Introduccion de La LecheДокумент16 страницIntroduccion de La LecheScaniaОценок пока нет
- Introduccion de La LecheДокумент16 страницIntroduccion de La LecheScaniaОценок пока нет
- CimentacionesДокумент8 страницCimentacionesHoward NavarroОценок пока нет
- CLASE 01 - Adhesion y Sistemas AdhesivosДокумент15 страницCLASE 01 - Adhesion y Sistemas AdhesivosLiliana Miranda A100% (1)
- HydraulicaДокумент46 страницHydraulicaedwar_12100% (1)
- Francisco Varela - Autopoiesis y Una Biología de La IntencionalidadДокумент17 страницFrancisco Varela - Autopoiesis y Una Biología de La IntencionalidadJuan Pablo CordovaОценок пока нет
- Planteamiento Del Problema de InvestigaciónДокумент9 страницPlanteamiento Del Problema de InvestigaciónSergio Nicolás Sabogal GarcíaОценок пока нет
- Ciclo Del Cobre TerminadoДокумент7 страницCiclo Del Cobre TerminadoJose Julián LópezОценок пока нет
- Hipótesis para Diferencia 2 MediasДокумент9 страницHipótesis para Diferencia 2 MediasKIRNANDОценок пока нет
- Unidad Tematica 5 - Complejidad Computacional - Problemas P y NPДокумент35 страницUnidad Tematica 5 - Complejidad Computacional - Problemas P y NPIan SVmОценок пока нет
- Sensores de TemperaturaДокумент58 страницSensores de TemperaturaSherlin Almanza ObregonОценок пока нет
- Dimensionamiento Del Generador ElectricoДокумент11 страницDimensionamiento Del Generador ElectricoJuanito Zúñiga García100% (1)
- Tarea 1Документ2 страницыTarea 1xavier landiОценок пока нет
- Sistema anti-incendio inteligenteДокумент3 страницыSistema anti-incendio inteligentegusequeОценок пока нет
- 10.6 - Manual de OyMДокумент8 страниц10.6 - Manual de OyMAnnaОценок пока нет
- Examen Parcial Algebra IiДокумент3 страницыExamen Parcial Algebra IiFabian MendozaОценок пока нет
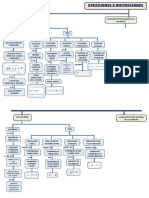
- Ecuaciones e InecuacionesДокумент2 страницыEcuaciones e InecuacionesTamara Rosales Tandaipan100% (2)
- Especificacion para Levantamientos Topograficos de Lt-Rev0Документ27 страницEspecificacion para Levantamientos Topograficos de Lt-Rev0joeltomas196150% (2)
- Pet - Sub-BaseДокумент4 страницыPet - Sub-BaseNelson Enrique Venegas RodriguezОценок пока нет
- Lámpara LED UV EV6000 para inspecciones con material fluorescenteДокумент4 страницыLámpara LED UV EV6000 para inspecciones con material fluorescenteArielОценок пока нет
- 225252653-Introduction-to-Microcasting-Techniques-for-MicroManufacturing-convertido ESДокумент42 страницы225252653-Introduction-to-Microcasting-Techniques-for-MicroManufacturing-convertido ESOneill Vasquez AmayaОценок пока нет
- Preguntas sobre estadística descriptiva e inferencialДокумент293 страницыPreguntas sobre estadística descriptiva e inferencialJesús CgОценок пока нет
- Calculo de VolumenesДокумент9 страницCalculo de VolumenesHenry RodriguezbОценок пока нет
- NCH 1017Документ15 страницNCH 1017Felipe LatorreОценок пока нет
- Muestreo Reconstruccion Control DigitalДокумент34 страницыMuestreo Reconstruccion Control DigitalelblinblinhotsauceОценок пока нет
- Metodo de Elementos Finitos-TrДокумент33 страницыMetodo de Elementos Finitos-TrRoberto DavisОценок пока нет
- Los Doce Rayos de LuzДокумент9 страницLos Doce Rayos de LuzEdna Berenice Hernandez80% (5)
- Geocompuestos de Drenaje Triplanar en Sistema de Subdrenaje en Vías Como ReemplazoДокумент8 страницGeocompuestos de Drenaje Triplanar en Sistema de Subdrenaje en Vías Como ReemplazojuvermcОценок пока нет
- Memoria Descriptiva Eléctricas ErmДокумент13 страницMemoria Descriptiva Eléctricas ErmAngelloОценок пока нет
- Cuestionario ClimatizacionДокумент4 страницыCuestionario ClimatizacionGeovanny TandazoОценок пока нет
- Norma técnica 331 ladrillosДокумент21 страницаNorma técnica 331 ladrillosCarmen Luisa Reymundo OnofreОценок пока нет