Вам также может понравиться
- Modelo PMOCДокумент16 страницModelo PMOCChristianBure90% (21)
- ErgonomiaДокумент212 страницErgonomiaPaulomaterias67% (3)
- Obediência a Qualquer CustoДокумент3 страницыObediência a Qualquer Custoluandameloig50% (2)
- Análise de Falhas - NovoДокумент111 страницAnálise de Falhas - NovoAilson Silva Alves100% (3)
- (5 e 6 ) Exercício Operação InversaДокумент1 страница(5 e 6 ) Exercício Operação InversaProfGilvan92% (12)
- Teoria de John RawlsДокумент13 страницTeoria de John RawlsManel FontesОценок пока нет
- NBR 14276 - 2006 - Brigada de Incêndio PDFДокумент37 страницNBR 14276 - 2006 - Brigada de Incêndio PDFMarco Antonio HoinskiОценок пока нет
- Sidur MessianicoДокумент11 страницSidur MessianicoZachary Reese0% (1)
- Óleo de São Rafael Arcanjo cura doençasДокумент19 страницÓleo de São Rafael Arcanjo cura doençasRodri FilОценок пока нет
- Design de Interiores Desenho A Mao LivreДокумент35 страницDesign de Interiores Desenho A Mao LivreRosa MОценок пока нет
- DEREN - Maya. O Uso Criativo Da Realidade PDFДокумент16 страницDEREN - Maya. O Uso Criativo Da Realidade PDFsamfrovigatti100% (2)
- NBR 13714 - 2000 - Sistemas de Hidrantes e de Mangotinhos para Combate A IncêndioДокумент25 страницNBR 13714 - 2000 - Sistemas de Hidrantes e de Mangotinhos para Combate A IncêndioPablo Eduardo Junges Abreu67% (3)
- Treinamento e desenvolvimento de recursos humanosДокумент22 страницыTreinamento e desenvolvimento de recursos humanosd_furlan155550% (2)
- Crimes contra Administração PúblicaДокумент24 страницыCrimes contra Administração Públicaevertonsp2000Оценок пока нет
- Tarot: O HIEROFANTE (PAPA)Документ3 страницыTarot: O HIEROFANTE (PAPA)Alex TarólogoОценок пока нет
- Projetando sistemas de combate a incêndioДокумент51 страницаProjetando sistemas de combate a incêndioOlavo MonteiroОценок пока нет
- Relatório sobre absorvedor dinâmico de vibrações em experimento na UFPAДокумент13 страницRelatório sobre absorvedor dinâmico de vibrações em experimento na UFPAHennerson A. SilvaОценок пока нет
- Trabalho de Gerência de Riscos IIIДокумент5 страницTrabalho de Gerência de Riscos IIIHennerson A. SilvaОценок пока нет
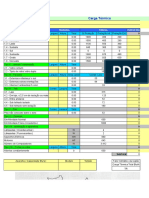
- Carga TermicaДокумент7 страницCarga TermicaRodrigo FilhoОценок пока нет
- Trabalho - Mapa de Riscos QuímicosДокумент30 страницTrabalho - Mapa de Riscos QuímicosHennerson A. SilvaОценок пока нет
- Análise preliminar de riscos para oficina de fabricação industrial na UHE Ferreira GomesДокумент15 страницAnálise preliminar de riscos para oficina de fabricação industrial na UHE Ferreira GomesHennerson A. SilvaОценок пока нет
- Trabalho NRs 07, 08, 09 (FINAL)Документ13 страницTrabalho NRs 07, 08, 09 (FINAL)Hennerson A. SilvaОценок пока нет
- Relatório 5Документ8 страницRelatório 5Hennerson A. SilvaОценок пока нет
- Gas GLP - Check ListДокумент15 страницGas GLP - Check ListElias Barros de FigueiredoОценок пока нет
- Gas GLP - Check ListДокумент15 страницGas GLP - Check ListElias Barros de FigueiredoОценок пока нет
- UNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorДокумент10 страницUNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorHennerson A. SilvaОценок пока нет
- 7° RelatorioДокумент7 страниц7° RelatorioHennerson A. SilvaОценок пока нет
- Relatório 3Документ8 страницRelatório 3Hennerson A. SilvaОценок пока нет
- Trabalho DisfagiaДокумент9 страницTrabalho DisfagiaHennerson A. SilvaОценок пока нет
- Relatório 1Документ9 страницRelatório 1Hennerson A. SilvaОценок пока нет
- Rede Ar Comprim Rev SIMPLIF PDFДокумент33 страницыRede Ar Comprim Rev SIMPLIF PDFLindemberg TrindadeОценок пока нет
- It 22 2018Документ24 страницыIt 22 2018Afonso Sérgio De Sant'Anna GomesОценок пока нет
- Relatório 2Документ10 страницRelatório 2Hennerson A. SilvaОценок пока нет
- Blocos Integrados Ao AutoCADДокумент1 страницаBlocos Integrados Ao AutoCADBruno ChivalskiОценок пока нет
- Termo de entrega de equipamentos ao campus Colorado do IFROДокумент1 страницаTermo de entrega de equipamentos ao campus Colorado do IFROgodoi2011Оценок пока нет
- Cálculo de VaporizaçãoДокумент1 страницаCálculo de VaporizaçãoHennerson A. SilvaОценок пока нет
- Modelo de ContratoДокумент5 страницModelo de ContratoHennerson A. SilvaОценок пока нет
- PMOC HVC 2013 Rev AДокумент75 страницPMOC HVC 2013 Rev AHennerson A. SilvaОценок пока нет
- Tabelas para Dimensionamento de HidrantesДокумент2 страницыTabelas para Dimensionamento de HidrantesHennerson A. SilvaОценок пока нет
- A Cidade IdealДокумент32 страницыA Cidade IdealJoelma MontelaresОценок пока нет
- Educação, Cultura e Etnodesenvolvimento - Saberes em Diálogo (LIVRO)Документ134 страницыEducação, Cultura e Etnodesenvolvimento - Saberes em Diálogo (LIVRO)EdilsonAlvesdeSouzaОценок пока нет
- Educação Estatística - Estado Da ArteДокумент18 страницEducação Estatística - Estado Da ArteCatia Da Rosa VizentinОценок пока нет
- Habitação e Cidade: o Programa Minha Casa Minha Vida em Russas - CearáДокумент96 страницHabitação e Cidade: o Programa Minha Casa Minha Vida em Russas - CearáNael Nunes PereiraОценок пока нет
- Da Ética Filosófica À Ética em Saúde - Franklin LeopoldoДокумент15 страницDa Ética Filosófica À Ética em Saúde - Franklin LeopoldodavidlopesdasilvaОценок пока нет
- Curso Psicologia Social Defensoria SPДокумент26 страницCurso Psicologia Social Defensoria SPVivian Prado PereiraОценок пока нет
- Aulas Práticas Método Transecto VegetacionalДокумент3 страницыAulas Práticas Método Transecto VegetacionalRodolfo Antônio da SilvaОценок пока нет
- Filosofia - 2013 - 1a Série - 2oДокумент16 страницFilosofia - 2013 - 1a Série - 2oLion Granier AlvesОценок пока нет
- A Ilustração Inglesa RevisitadaДокумент32 страницыA Ilustração Inglesa RevisitadaDiego MachadoОценок пока нет
- Sibapa Informativo #129Документ4 страницыSibapa Informativo #129Segunda Igreja Batista em PalmasОценок пока нет
- Cap 03 - 3.3 GriffithsДокумент2 страницыCap 03 - 3.3 GriffithsValter DantasОценок пока нет
- Apresentação Palavras Homônimas, Parônimas e PolissemiaДокумент7 страницApresentação Palavras Homônimas, Parônimas e PolissemiaLino Cunha SilvaОценок пока нет
- Passaportes - TeoriaДокумент14 страницPassaportes - TeoriasugasparОценок пока нет
- Ami.3 - PortuguêsДокумент224 страницыAmi.3 - PortuguêsjbonezziОценок пока нет
- Material Marketing Pessoal - Aula Do 8º SEMESTREДокумент53 страницыMaterial Marketing Pessoal - Aula Do 8º SEMESTRErosaliamedeirosОценок пока нет
- Técnicas para elaborar seu código pessoal de condutaДокумент16 страницTécnicas para elaborar seu código pessoal de condutaMarcelo Augusto100% (1)
- Educação Da Superalma Sete - Parte InicialДокумент52 страницыEducação Da Superalma Sete - Parte InicialatentoempazОценок пока нет
- Port 1Документ13 страницPort 1MarcoAntônioVasconcelosОценок пока нет
- A organização e sua estruturaДокумент19 страницA organização e sua estruturarositoОценок пока нет