Вам также может понравиться
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsОт EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsОценок пока нет
- ADR241CДокумент11 страницADR241CNamrata ShettiОценок пока нет
- Bluetooth BVH2314AAДокумент47 страницBluetooth BVH2314AAYotuel MotiartyОценок пока нет
- Micom P740Документ18 страницMicom P740vsrikala68Оценок пока нет
- Type Veot and VeosДокумент8 страницType Veot and VeosBalu M100% (1)
- REL 531-1-0 Line Distance Protection TerminalДокумент20 страницREL 531-1-0 Line Distance Protection Terminalsenthil kumarОценок пока нет
- Micom P540 Series Current Differential RelaysДокумент24 страницыMicom P540 Series Current Differential Relaysdave chaudhuryОценок пока нет
- R5582E RELAY Selection GuideДокумент14 страницR5582E RELAY Selection GuideChandra Hamidi KautsarОценок пока нет
- P543&5 en TM M PDFДокумент874 страницыP543&5 en TM M PDFNgoc NeoОценок пока нет
- ABB Busbar Protection REB670 2.0 ANSIДокумент498 страницABB Busbar Protection REB670 2.0 ANSIksg9731Оценок пока нет
- Tapcon Site ReportДокумент2 страницыTapcon Site Reportganeshapec8Оценок пока нет
- Power Systems Relays Relion 670Документ43 страницыPower Systems Relays Relion 670kass_ecsОценок пока нет
- ABB REM 543 Relay Energy Meter CalibratiДокумент10 страницABB REM 543 Relay Energy Meter CalibratiPrashant GaurОценок пока нет
- 7SS52 Training 05 - 2009Документ115 страниц7SS52 Training 05 - 2009Ashok KumarОценок пока нет
- Votano 100Документ26 страницVotano 100buicongbinhОценок пока нет
- SIP5 APN 025 - 7UT87 Autotransformer Bank - en PDFДокумент16 страницSIP5 APN 025 - 7UT87 Autotransformer Bank - en PDFferomagnetizamОценок пока нет
- NC RFG - Requirements in The Context of Present PracticesДокумент48 страницNC RFG - Requirements in The Context of Present PracticesMattStageОценок пока нет
- Type P8n, PQ8n, PN8n: Auxiliary RelayДокумент7 страницType P8n, PQ8n, PN8n: Auxiliary RelayDinesh ThevanОценок пока нет
- 7UM6 Gen Prot-Schemes EДокумент10 страниц7UM6 Gen Prot-Schemes EruslaninstОценок пока нет
- Importance of X-R RatiosДокумент6 страницImportance of X-R RatiosNayreth MezonesОценок пока нет
- Technical Instruction ABB RED670Документ10 страницTechnical Instruction ABB RED670Iqball ArdiyanОценок пока нет
- Commissioning Numerical RelaysДокумент24 страницыCommissioning Numerical RelaysVHMANOHARОценок пока нет
- ABB PFC ControlerДокумент6 страницABB PFC ControlermajzdorОценок пока нет
- CT Class Very ImportantДокумент6 страницCT Class Very ImportantEngr Fahimuddin QureshiОценок пока нет
- Current Transformer Sizing & Saturation Calculation With Transient Performance Analysis of CT Using ATP SoftwareДокумент8 страницCurrent Transformer Sizing & Saturation Calculation With Transient Performance Analysis of CT Using ATP SoftwareInvyteОценок пока нет
- P438 EN M R-b5-A 311 661 PDFДокумент1 192 страницыP438 EN M R-b5-A 311 661 PDFAshutosh KumarОценок пока нет
- TKIS Relay Setting NewДокумент34 страницыTKIS Relay Setting NewsalmanОценок пока нет
- 07a Backup OCEF Relay - Tech. Data Check List CompletedДокумент6 страниц07a Backup OCEF Relay - Tech. Data Check List CompletedAnupam0103Оценок пока нет
- Data Book-CVT PDFДокумент97 страницData Book-CVT PDFĐỗ Hồng Sơn100% (1)
- Auto Transformer Protection SchemesДокумент3 страницыAuto Transformer Protection SchemesArogya Raju PudhotaОценок пока нет
- Ag2015-20 20150511Документ10 страницAg2015-20 20150511sikander843562Оценок пока нет
- 115kV - E02 - 60R - ROC Feerder 1 - RED670 Differential Relay - at Glow SideДокумент10 страниц115kV - E02 - 60R - ROC Feerder 1 - RED670 Differential Relay - at Glow SideYongchayut WiratchatiОценок пока нет
- 132kv Ss Vestas Test ReportДокумент77 страниц132kv Ss Vestas Test ReportdaminhvienОценок пока нет
- Ici-C&C/Seupptcl/A - S (Sup.) /2011-12/001: Tested by WitnessedДокумент7 страницIci-C&C/Seupptcl/A - S (Sup.) /2011-12/001: Tested by WitnessedkamarajkanОценок пока нет
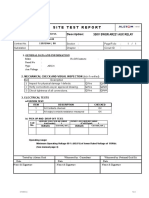
- Site Test Report Date: 29/5/2018 Contractor's Name: HADI HAIDER Customer: Sec-Eoa Jubail Commercial Port 115/13.8Kv Ss-2 Tapcon 260 Avr RelayДокумент4 страницыSite Test Report Date: 29/5/2018 Contractor's Name: HADI HAIDER Customer: Sec-Eoa Jubail Commercial Port 115/13.8Kv Ss-2 Tapcon 260 Avr RelayMuhammad NasirОценок пока нет
- LA Condition MonitoringДокумент20 страницLA Condition MonitoringPET MADAKKATHARAОценок пока нет
- ISA Introduction To The Test of Protection RelaysДокумент23 страницыISA Introduction To The Test of Protection RelaysCata CatalinОценок пока нет
- Sieyuan Electric Co., LTD: ClientДокумент19 страницSieyuan Electric Co., LTD: ClientRami The OneОценок пока нет
- Basics of Load CentersДокумент98 страницBasics of Load Centersvda0904Оценок пока нет
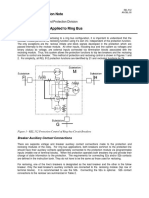
- Ring Bus Reclosing 20121217112215906Документ6 страницRing Bus Reclosing 20121217112215906Rick JordanОценок пока нет
- Ms MP Manual 2012Документ8 страницMs MP Manual 2012Arun KumarОценок пока нет
- REF542plus Tob 756269 ENaДокумент28 страницREF542plus Tob 756269 ENaRazvan MaresОценок пока нет
- 2.1 References: 2.0 HV Sheath DC Test Protocol: (For Reference Only)Документ2 страницы2.1 References: 2.0 HV Sheath DC Test Protocol: (For Reference Only)SeguОценок пока нет
- 1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFДокумент6 страниц1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFUmanshu PandeyОценок пока нет
- Red 670 For 110 KV RrelДокумент24 страницыRed 670 For 110 KV RrelRam EshОценок пока нет
- SA2007-000028 - en Differential Protection For Special Power Transformers With RET 670Документ11 страницSA2007-000028 - en Differential Protection For Special Power Transformers With RET 670shyam_krishnan_16Оценок пока нет
- Rej525 Tob 751205enc PDFДокумент12 страницRej525 Tob 751205enc PDFJayam KondanОценок пока нет
- Trivector MeterДокумент2 страницыTrivector MeterTarun AhujaОценок пока нет
- General Line ProtectionДокумент104 страницыGeneral Line ProtectionPrasenjit Dutta100% (1)
- CVT Tevp150kvДокумент18 страницCVT Tevp150kvDaniel BimbinganОценок пока нет
- Capacitance Voltage Transforme1Документ4 страницыCapacitance Voltage Transforme1ayushОценок пока нет
- Insulation CoordinationДокумент2 страницыInsulation CoordinationVeera BramhamОценок пока нет
- 7SJ80xx Manual A5 V041001 UsДокумент550 страниц7SJ80xx Manual A5 V041001 UsAlexandre Moreno100% (1)
- Testing P543 BiasДокумент23 страницыTesting P543 BiasRavi MehroliyaОценок пока нет
- Transmission Line ProtectionДокумент38 страницTransmission Line ProtectionE.AvinashОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Site Test Report: DescriptionДокумент2 страницыSite Test Report: DescriptionarunОценок пока нет
- Earthing Transformer or Grounding TransformerДокумент6 страницEarthing Transformer or Grounding TransformerarunОценок пока нет
- Circuit Breaker Fail Protection: DisclaimerДокумент11 страницCircuit Breaker Fail Protection: DisclaimerarunОценок пока нет
- Px4x Software Download ProcedureДокумент3 страницыPx4x Software Download Procedurearun100% (1)
- Mumbai-Surat Bus TicketДокумент1 страницаMumbai-Surat Bus TicketarunОценок пока нет
- Name Plate Details: Location: 132Kv GisДокумент2 страницыName Plate Details: Location: 132Kv GisarunОценок пока нет
- E05 OHL-1 CT (Modified)Документ3 страницыE05 OHL-1 CT (Modified)arunОценок пока нет
- Adaptive Autoreclosure To Increase System Stability and Reduce Stress To Circuit BreakersДокумент8 страницAdaptive Autoreclosure To Increase System Stability and Reduce Stress To Circuit BreakersarunОценок пока нет
- MiCOM P443 - Dist. Protn. Relay - Test FormatДокумент8 страницMiCOM P443 - Dist. Protn. Relay - Test FormatarunОценок пока нет
- 1par Regular (New)Документ8 страниц1par Regular (New)Daw Aye NweОценок пока нет
- Velo 3D - PB-Sapphire-v1 - 05-Release-WebДокумент2 страницыVelo 3D - PB-Sapphire-v1 - 05-Release-Webravichandran0506Оценок пока нет
- Xbox 360 Repair Manual Guide+ (02-20)Документ19 страницXbox 360 Repair Manual Guide+ (02-20)Rosselino DE Jesus MonteiroОценок пока нет
- Training ReportДокумент30 страницTraining ReportManuka DilshanОценок пока нет
- Chapter 7 - CPU Structure and Function Ver 1Документ43 страницыChapter 7 - CPU Structure and Function Ver 1Nurhidayatul FadhilahОценок пока нет
- Sustainability 12 06687 v2Документ23 страницыSustainability 12 06687 v2Filmon TОценок пока нет
- Sesi CVДокумент3 страницыSesi CVThabisoОценок пока нет
- Prismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesДокумент2 страницыPrismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesIftekhar AhamedОценок пока нет
- IMP Q For End Sem ExaminationДокумент2 страницыIMP Q For End Sem Examinationzk8745817Оценок пока нет
- LCD InterfacingДокумент22 страницыLCD InterfacingNanduОценок пока нет
- T4S Post Amendment 15.09.2020Документ130 страницT4S Post Amendment 15.09.2020kambanОценок пока нет
- Presentation On Core JavaДокумент16 страницPresentation On Core Javaprince himanshu0% (1)
- 1 2 7 P Understandingdigitaldesign RNG (1) FinishedДокумент8 страниц1 2 7 P Understandingdigitaldesign RNG (1) Finishedapi-287488627Оценок пока нет
- ABX00063 SchematicsДокумент8 страницABX00063 SchematicsIoan TudosaОценок пока нет
- CT050!3!2 Web Applications - Assignment 2016Документ4 страницыCT050!3!2 Web Applications - Assignment 2016Bryan ArraisОценок пока нет
- Design and Fabrication of Mini Surveillance Drone PresentationДокумент9 страницDesign and Fabrication of Mini Surveillance Drone PresentationSaijay ShirodkarОценок пока нет
- Mysql Connector - Version 1.1: PropertiesДокумент6 страницMysql Connector - Version 1.1: PropertiesbruxotoloОценок пока нет
- REPORTINGДокумент55 страницREPORTINGSabharish KoruturuОценок пока нет
- Max 15.0V at 12V Max 31.5V at 24V Max 61.0V at 48V: Main FeaturesДокумент1 страницаMax 15.0V at 12V Max 31.5V at 24V Max 61.0V at 48V: Main FeaturesJoebany SaboteОценок пока нет
- Work Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Документ74 страницыWork Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Rolandas PetkusОценок пока нет
- Extio 2 Remote Peripheral Solutions Installation Kit Instruction EP-DPCX24Документ98 страницExtio 2 Remote Peripheral Solutions Installation Kit Instruction EP-DPCX24akramhomriОценок пока нет
- Sravanti - SSE - MNR SolutionsДокумент4 страницыSravanti - SSE - MNR SolutionsshanОценок пока нет
- Ai, ML, DL PDFДокумент2 страницыAi, ML, DL PDFsetiawan.hadiОценок пока нет
- MB-910 enДокумент74 страницыMB-910 enadrianoglopesОценок пока нет
- School Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inДокумент12 страницSchool Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inankush rathorОценок пока нет
- List of Lab Exercises: SL - No Name of The ProgramДокумент37 страницList of Lab Exercises: SL - No Name of The ProgrambiggerОценок пока нет
- Computer NetworksДокумент90 страницComputer NetworkslalithaОценок пока нет
- Review On Supply Chain Management of Coats Bangladesh PDFДокумент14 страницReview On Supply Chain Management of Coats Bangladesh PDFSajeed Mahmud MaheeОценок пока нет
- HIAB14000XGДокумент267 страницHIAB14000XGMigueОценок пока нет