Вам также может понравиться
- Trans Axle 7 85W140Документ1 страницаTrans Axle 7 85W140Mateo RincónОценок пока нет
- DifusoresДокумент2 страницыDifusoresMateo RincónОценок пока нет
- Carter Ep 220-320Документ1 страницаCarter Ep 220-320Mateo RincónОценок пока нет
- Flujo GramaДокумент1 страницаFlujo GramaMateo RincónОценок пока нет
- Soldadura Por ResistenciaДокумент8 страницSoldadura Por ResistenciaMateo RincónОценок пока нет
- FUNDIFORMASДокумент17 страницFUNDIFORMASMateo RincónОценок пока нет
- MaquinariaДокумент2 страницыMaquinariaMateo RincónОценок пока нет
- Simbología y Abreviaturas de Maquinas HidráulicasДокумент9 страницSimbología y Abreviaturas de Maquinas HidráulicasMateo Rincón100% (1)
- Difusores AplicacionesДокумент1 страницаDifusores AplicacionesMateo Rincón100% (1)
- Parker - Hidraulica BombasДокумент56 страницParker - Hidraulica BombasMateo Rincón100% (1)
- Soldadura Por ResistenciaДокумент8 страницSoldadura Por ResistenciaMateo RincónОценок пока нет
- Actividad 2 - HerramientasДокумент21 страницаActividad 2 - HerramientasCruzYocllaMaryoryОценок пока нет
- Consolidado EstadisticaДокумент55 страницConsolidado EstadisticaJona TasinchanaОценок пока нет
- Evaluacion 5°-MatemáticaДокумент5 страницEvaluacion 5°-MatemáticaJessica Villagran VergaraОценок пока нет
- Numeros Complejos y FasoresДокумент8 страницNumeros Complejos y FasoresPedro Zepeda PozoОценок пока нет
- Civil UjapДокумент11 страницCivil UjapJhon GreigОценок пока нет
- Manual de Calculo Integral Alumno DGETIДокумент130 страницManual de Calculo Integral Alumno DGETILulú VarguezОценок пока нет
- DIVISIÓNДокумент3 страницыDIVISIÓNPame Jara SaavedraОценок пока нет
- Una Variable Aleatoria X Puede Tomar Los Valores 30Документ6 страницUna Variable Aleatoria X Puede Tomar Los Valores 30Miguel Jesus Ramos SalasОценок пока нет
- Z - Programa-Historia y Filosofía de La MatemáticaДокумент4 страницыZ - Programa-Historia y Filosofía de La MatemáticaCarlos HerreraОценок пока нет
- LogaritmosДокумент9 страницLogaritmosNicolasОценок пока нет
- Circunferencia para Primero de SecundariaДокумент6 страницCircunferencia para Primero de Secundariacarlos velaОценок пока нет
- Algebra Lineal Quiz 1 Semana 3 PDFДокумент6 страницAlgebra Lineal Quiz 1 Semana 3 PDFgiovannibecerraОценок пока нет
- Español I PDFДокумент272 страницыEspañol I PDFSergio Noé Sánchez GutiérrezОценок пока нет
- Ortoganales PDFДокумент4 страницыOrtoganales PDFEntretuymilmares AragonОценок пока нет
- Propiedades de Una Sección Mediante El Teorema de GreenДокумент7 страницPropiedades de Una Sección Mediante El Teorema de GreenKevvin FrancisОценок пока нет
- EJEMPLO PRESUPUESTO de VENTAS (Metodo Minimo Cuadrados Largo)Документ2 страницыEJEMPLO PRESUPUESTO de VENTAS (Metodo Minimo Cuadrados Largo)ANY ELIZABETH SANTOS POCASANGRE100% (3)
- Grupo 299004 4Документ18 страницGrupo 299004 4krpytОценок пока нет
- Curvas EquipotencialesДокумент12 страницCurvas EquipotencialesdanielОценок пока нет
- Calculo Integral AntologiaДокумент51 страницаCalculo Integral Antologiaanali HernandezОценок пока нет
- Tarea 1.1 (6.08-10.08) - Derivadas y AntiderivadasДокумент7 страницTarea 1.1 (6.08-10.08) - Derivadas y AntiderivadasLaura Gómez AmayaОценок пока нет
- Taller de Teselados Semana Del 27 Al 30 de AbrilДокумент2 страницыTaller de Teselados Semana Del 27 Al 30 de AbrilAngela Montes blandonОценок пока нет
- Guia de Desarrollo Ejercicio 1 Analisis de Dualidad Tarea 3 (16-01) 2021Документ7 страницGuia de Desarrollo Ejercicio 1 Analisis de Dualidad Tarea 3 (16-01) 2021luis carlosОценок пока нет
- Método Símplex v01Документ15 страницMétodo Símplex v01Arturo Corona Pegueros0% (1)
- El Cangrejo Nos Ayuda A CalcularДокумент2 страницыEl Cangrejo Nos Ayuda A CalcularCésar Martín Napa PradoОценок пока нет
- EstadOFE - POD - WebДокумент5 страницEstadOFE - POD - WebMaroua SlimaniОценок пока нет
- Un Ángulo de Un Triángulo Mide 30Документ7 страницUn Ángulo de Un Triángulo Mide 30Yusmery GarridoОценок пока нет
- Física Ii (Ma462) Semana 04 - Sesión 1: Respuesta: 3,15×10 JДокумент6 страницFísica Ii (Ma462) Semana 04 - Sesión 1: Respuesta: 3,15×10 JCarlos Martín Medina TáberОценок пока нет
- Teoría de Los Grandes Números CasinosДокумент7 страницTeoría de Los Grandes Números Casinosjuan carlos MatosОценок пока нет
- 06 - Integrales Por PartesДокумент2 страницы06 - Integrales Por PartesJUAN OSCAR RAMOS ROSASОценок пока нет
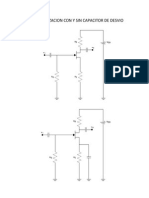
- Autopolarizacion Con y Sin Capacitor de DesvioДокумент13 страницAutopolarizacion Con y Sin Capacitor de DesvioLuis AcevedoОценок пока нет