Вам также может понравиться
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsОт EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsРейтинг: 4 из 5 звезд4/5 (1)
- Hyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationОт EverandHyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationОценок пока нет
- Homework 17 - Concept Questions on Sound Waves and InterferenceДокумент6 страницHomework 17 - Concept Questions on Sound Waves and Interference洪健勛Оценок пока нет
- Introduction to Radiowave Propagation OverviewДокумент55 страницIntroduction to Radiowave Propagation OverviewRenato MangilaОценок пока нет
- Wave Phenomena PracticeДокумент63 страницыWave Phenomena PracticeDeepak SinghОценок пока нет
- Radio Antenna Interference ProblemsДокумент5 страницRadio Antenna Interference ProblemsCristian Julián Díaz BohórquezОценок пока нет
- Week8 InterferometersДокумент84 страницыWeek8 InterferometersArijit PanigrahyОценок пока нет
- Inverse Square Law ExplainedДокумент3 страницыInverse Square Law Explainedtwinkle4545Оценок пока нет
- ISAT 2011 PaperДокумент30 страницISAT 2011 PaperRavi LorventОценок пока нет
- PHYS1131 Solutions Tut 6 11Документ14 страницPHYS1131 Solutions Tut 6 11Jason Tan100% (2)
- ch16 PDFДокумент24 страницыch16 PDFRodrigo S QuirinoОценок пока нет
- Sound MCQ and SolutionДокумент15 страницSound MCQ and SolutionParanivel KannappanОценок пока нет
- 31 Debye SearsДокумент4 страницы31 Debye SearsOky IkhramullahОценок пока нет
- 2021-YuXiang-Wave Trapping by Acoustic Black Hole Simultaneous Reduction of - APLДокумент9 страниц2021-YuXiang-Wave Trapping by Acoustic Black Hole Simultaneous Reduction of - APLKen HOОценок пока нет
- Application of The Geometric Theory of DiffractionДокумент9 страницApplication of The Geometric Theory of DiffractionSIA_2Оценок пока нет
- Criterio BonelloДокумент11 страницCriterio BonelloDonaldo Garcia MendietaОценок пока нет
- Lecture Notes "Seafloor Mapping": D.g.simons@lr - Tudelft.nlДокумент37 страницLecture Notes "Seafloor Mapping": D.g.simons@lr - Tudelft.nlJosemi CastilloОценок пока нет
- Assignment For LecturesДокумент16 страницAssignment For LecturesDeepak JainОценок пока нет
- Waves A Level Questions and AnswersДокумент69 страницWaves A Level Questions and AnswersBunya AnillyОценок пока нет
- Practice QuestionsДокумент6 страницPractice Questionsataberk-ozkayaОценок пока нет
- ECS 455 Chapter 1: Introduction & ReviewДокумент37 страницECS 455 Chapter 1: Introduction & ReviewKalolo SadathОценок пока нет
- BiprismДокумент35 страницBiprismAviral99Оценок пока нет
- Determining Wavelength of Light Using Newton's RingsДокумент8 страницDetermining Wavelength of Light Using Newton's RingsVivek SinghОценок пока нет
- Rec3 SolutionsДокумент6 страницRec3 SolutionsOscar Martinez0% (1)
- Compile BLM Ada Punya Anggi Nina Rana DiviДокумент10 страницCompile BLM Ada Punya Anggi Nina Rana DiviSelma Regita MahardiniОценок пока нет
- ISAT-2011 Previous Year Question PaperДокумент30 страницISAT-2011 Previous Year Question Paperktktkt01Оценок пока нет
- be_first-year-engineering_semester-2_2018_december_applied-physics-ii-cbcgsДокумент20 страницbe_first-year-engineering_semester-2_2018_december_applied-physics-ii-cbcgsmahek guptaОценок пока нет
- Interpreting Convolutions VisuallyДокумент22 страницыInterpreting Convolutions VisuallyDipen BarotОценок пока нет
- SoundДокумент45 страницSoundAli AbdallahОценок пока нет
- SPPU PHYSICS QP Solution 2012-13 sem-IIДокумент8 страницSPPU PHYSICS QP Solution 2012-13 sem-IIHemantОценок пока нет
- 76 JTRJ 645 Hyeddr 56Документ6 страниц76 JTRJ 645 Hyeddr 56Tiago CostaОценок пока нет
- Introduction To Interferometry - Lee - UnknownДокумент21 страницаIntroduction To Interferometry - Lee - UnknownBrady WenОценок пока нет
- Previous Year Question Bank Physics Waves - and - Sounds - ProblemsДокумент18 страницPrevious Year Question Bank Physics Waves - and - Sounds - ProblemsArnav SarodeОценок пока нет
- AIPMT 2016 Physics Paper With Ans & Solution by Allen KotaДокумент10 страницAIPMT 2016 Physics Paper With Ans & Solution by Allen KotaMohitОценок пока нет
- Akustiikkapaivat 2019 s346Документ10 страницAkustiikkapaivat 2019 s346Atharv MarneОценок пока нет
- Q1. Cellular Mobile Communication System: N I Ij+ JДокумент11 страницQ1. Cellular Mobile Communication System: N I Ij+ JSifun PadhiОценок пока нет
- 17 InterferometersДокумент84 страницы17 InterferometersAnirban PaulОценок пока нет
- 13 - Applications of DerivativesДокумент9 страниц13 - Applications of DerivativeskapilОценок пока нет
- Optics Final PDFДокумент3 страницыOptics Final PDFΧρίστος ΠαπαναστασίουОценок пока нет
- Assignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CДокумент5 страницAssignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CGanesh KumarОценок пока нет
- Rayleigh and Rician DistributionsДокумент5 страницRayleigh and Rician DistributionsLuisaF.ValderramaОценок пока нет
- Irp DPP No7Документ4 страницыIrp DPP No7Shivam JaggiОценок пока нет
- Pruebas IllionoisДокумент37 страницPruebas IllionoisVerito A SecasОценок пока нет
- Question Paper Format and InstructionsДокумент38 страницQuestion Paper Format and Instructionsanon020202Оценок пока нет
- Chap - 2 - Discrete-Time and Continuous-Time AWGN Channels PDFДокумент11 страницChap - 2 - Discrete-Time and Continuous-Time AWGN Channels PDFBKZ0Оценок пока нет
- TP1-Fernandez-Iturburu-Venezia-2023 2C-V1Документ20 страницTP1-Fernandez-Iturburu-Venezia-2023 2C-V1iturburu48593Оценок пока нет
- Raman Nath Diffraction ManualДокумент8 страницRaman Nath Diffraction ManualPratik PatnaikОценок пока нет
- S-T Propagation: Outline: - Path Loss and Fading - Statistical Channel Characterization - Examples - Antenna CorrelationДокумент32 страницыS-T Propagation: Outline: - Path Loss and Fading - Statistical Channel Characterization - Examples - Antenna CorrelationMohammed Abd El HakeemОценок пока нет
- Circle theorems and propertiesДокумент71 страницаCircle theorems and propertiesTanya JainОценок пока нет
- Jee Main Test 6Документ41 страницаJee Main Test 6rs81219952gmailcomОценок пока нет
- Waves On String and Sound 30-10-2020Документ5 страницWaves On String and Sound 30-10-2020KARRA ASHISH REDDYОценок пока нет
- PHYS 471 Optics Homework on Fabry-Perot Cavities and DiffractionДокумент2 страницыPHYS 471 Optics Homework on Fabry-Perot Cavities and DiffractionVu Duc TuОценок пока нет
- Gejala GelombangДокумент6 страницGejala GelombangVincent VetterОценок пока нет
- Sound Fields Radiated by Multiple Sound Sources ArraysДокумент45 страницSound Fields Radiated by Multiple Sound Sources ArraysmewarulesОценок пока нет
- Resonant Conductance of Inclined Slotsin The NarrowДокумент3 страницыResonant Conductance of Inclined Slotsin The NarrowAlireza GhayekhlooОценок пока нет
- FORMULAДокумент4 страницыFORMULAsampleGeekОценок пока нет
- BÀI TẬP VẬT LÝ 3Документ13 страницBÀI TẬP VẬT LÝ 3Trung NamОценок пока нет
- A Disk Monopole AntennaДокумент4 страницыA Disk Monopole AntennaAgra GautamaОценок пока нет
- Lighting Fittings Performance and Design: International Series of Monographs in Electrical EngineeringОт EverandLighting Fittings Performance and Design: International Series of Monographs in Electrical EngineeringОценок пока нет
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsОт EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsОценок пока нет
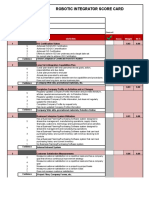
- Robotic Integrator Score Card: Item Rating Criteria Score Weight W+SДокумент5 страницRobotic Integrator Score Card: Item Rating Criteria Score Weight W+SdОценок пока нет
- Long play version of standard bias studio tapeДокумент6 страницLong play version of standard bias studio tapedОценок пока нет
- Superior Slim Safe Data Sheet ENДокумент1 страницаSuperior Slim Safe Data Sheet ENdОценок пока нет
- Analog Tapes: SM900, SM911, SM468, LPR35Документ14 страницAnalog Tapes: SM900, SM911, SM468, LPR35dОценок пока нет
- Classé Audio Inc.: CAP-151 Service ManualДокумент24 страницыClassé Audio Inc.: CAP-151 Service ManualdОценок пока нет
- 200F User ManualДокумент148 страниц200F User Manualsupport dataОценок пока нет
- 2009 10 Genese Quartet EN PDFДокумент3 страницы2009 10 Genese Quartet EN PDFdОценок пока нет
- Cap 151 OmДокумент25 страницCap 151 OmdОценок пока нет
- Firmware Patch Notes: Firmware: 1.04B02 BETA Hardware: Ax Date: August 9, 2018Документ2 страницыFirmware Patch Notes: Firmware: 1.04B02 BETA Hardware: Ax Date: August 9, 2018dОценок пока нет
- Situatie Infectii Coronavirus (COVID-19) - 11.03.2020 PDFДокумент6 страницSituatie Infectii Coronavirus (COVID-19) - 11.03.2020 PDFdОценок пока нет
- BE Sport4 English UM V1.1g 20180524 PDFДокумент19 страницBE Sport4 English UM V1.1g 20180524 PDFdОценок пока нет
- Block P2P Traffics With PfSense Using Snort IPS - FCOOS BlogsДокумент7 страницBlock P2P Traffics With PfSense Using Snort IPS - FCOOS Blogslara2005Оценок пока нет
- Service Manual: N1B/N1SG U1B/K1BДокумент90 страницService Manual: N1B/N1SG U1B/K1BdОценок пока нет
- Stream music wirelessly from PC or internet with Marantz NA7004 Network Audio PlayerДокумент2 страницыStream music wirelessly from PC or internet with Marantz NA7004 Network Audio PlayerdОценок пока нет
- Long play version of standard bias studio tapeДокумент6 страницLong play version of standard bias studio tapedОценок пока нет
- Huawei HG658 V2Документ16 страницHuawei HG658 V2Adrian SoareОценок пока нет
- Need For Speed Porsche Unleashed - Manual - Win - EN PDFДокумент32 страницыNeed For Speed Porsche Unleashed - Manual - Win - EN PDFdОценок пока нет
- Need For Speed Porsche Unleashed - Manual - Win - EN PDFДокумент32 страницыNeed For Speed Porsche Unleashed - Manual - Win - EN PDFdОценок пока нет
- Delta Deck 0906 v3Документ19 страницDelta Deck 0906 v3dОценок пока нет
- Network Audio Player: Español Français EnglishДокумент40 страницNetwork Audio Player: Español Français EnglishdОценок пока нет
- DFW (D&M Firmware Writer) : The Operating Manual For Updating of Marantz FirmwareДокумент17 страницDFW (D&M Firmware Writer) : The Operating Manual For Updating of Marantz FirmwaredОценок пока нет
- How To Build The Dementia Friendly Music Player: 28 October 2019,, Ross PorterДокумент47 страницHow To Build The Dementia Friendly Music Player: 28 October 2019,, Ross PorterdОценок пока нет
- Long play version of standard bias studio tapeДокумент6 страницLong play version of standard bias studio tapedОценок пока нет
- Service Bulletin: No.: MZ10-073 DateДокумент2 страницыService Bulletin: No.: MZ10-073 DatedОценок пока нет
- Situatie Infectii Coronavirus (COVID-19) - 11.03.2020 PDFДокумент6 страницSituatie Infectii Coronavirus (COVID-19) - 11.03.2020 PDFdОценок пока нет
- BE Sport4 English UM V1.1g 20180524 PDFДокумент19 страницBE Sport4 English UM V1.1g 20180524 PDFdОценок пока нет
- How To Build The Dementia Friendly Music Player: 28 October 2019,, Ross PorterДокумент47 страницHow To Build The Dementia Friendly Music Player: 28 October 2019,, Ross PorterdОценок пока нет
- 2016-06-03 Microlife Connected Health, Privacy Policy and Terms of UseДокумент2 страницы2016-06-03 Microlife Connected Health, Privacy Policy and Terms of UsedОценок пока нет
- 903X A2 A3 MaunalДокумент113 страниц903X A2 A3 MaunaldОценок пока нет
- Aries Usersguide r1Документ8 страницAries Usersguide r1dОценок пока нет
- Outstanding 12m Bus DrivelineДокумент2 страницыOutstanding 12m Bus DrivelineArshad ShaikhОценок пока нет
- Lending Tree PDFДокумент14 страницLending Tree PDFAlex OanonoОценок пока нет
- Wargames Illustrated #115Документ64 страницыWargames Illustrated #115Анатолий Золотухин100% (1)
- Windows Keyboard Shortcuts OverviewДокумент3 страницыWindows Keyboard Shortcuts OverviewShaik Arif100% (1)
- Research PaperДокумент15 страницResearch PapershrirangОценок пока нет
- Principles of Marketing Eighth Edition Philip Kotler and Gary ArmstrongДокумент17 страницPrinciples of Marketing Eighth Edition Philip Kotler and Gary ArmstrongJunaid KhalidОценок пока нет
- Shell Omala S2 G150 DatasheetДокумент3 страницыShell Omala S2 G150 Datasheetphankhoa83-1Оценок пока нет
- Asm Master Oral Notes - As Per New SyllabusДокумент262 страницыAsm Master Oral Notes - As Per New Syllabusshanti prakhar100% (1)
- Homer Christensen ResumeДокумент4 страницыHomer Christensen ResumeR. N. Homer Christensen - Inish Icaro KiОценок пока нет
- The Quantum Gravity LagrangianДокумент3 страницыThe Quantum Gravity LagrangianNige Cook100% (2)
- Fabm1 q3 Mod4 Typesofmajoraccounts FinalДокумент25 страницFabm1 q3 Mod4 Typesofmajoraccounts FinalClifford FloresОценок пока нет
- FIDIC delay and disruption standardsДокумент7 страницFIDIC delay and disruption standardsMohammad FayazОценок пока нет
- Issue 189Документ38 страницIssue 189Oncampus.net100% (1)
- Conservation of Kuttichira SettlementДокумент145 страницConservation of Kuttichira SettlementSumayya Kareem100% (1)
- Guiffre V MaxwellДокумент40 страницGuiffre V MaxwellTechno Fog91% (32)
- Bargaining Power of SuppliersДокумент9 страницBargaining Power of SuppliersPiyumi VitharanaОценок пока нет
- Mutaz Abdelrahim - Doa - MT-103Документ17 страницMutaz Abdelrahim - Doa - MT-103Minh KentОценок пока нет
- Bikini - USA - 03.2017Документ68 страницBikini - USA - 03.2017OvidiuОценок пока нет
- Sheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMДокумент2 страницыSheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMKhalifa MohamedОценок пока нет
- 6a. ICMR STSДокумент15 страниц6a. ICMR STSVishnu Praba AОценок пока нет
- Biotechnology Eligibility Test (BET) For DBT-JRF Award (2010-11)Документ20 страницBiotechnology Eligibility Test (BET) For DBT-JRF Award (2010-11)Nandakumar HaorongbamОценок пока нет
- FRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksДокумент3 страницыFRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksAhmed YacoubОценок пока нет
- Insert BondingДокумент14 страницInsert BondingHelpful HandОценок пока нет
- Pathways-Childrens Ministry LeaderДокумент16 страницPathways-Childrens Ministry LeaderNeil AtwoodОценок пока нет
- p2 - Guerrero Ch13Документ40 страницp2 - Guerrero Ch13JerichoPedragosa88% (17)
- O - 6 Series Mill Operation Manual-ENДокумент119 страницO - 6 Series Mill Operation Manual-ENLeonardo OlivaresОценок пока нет
- Online Music QuizДокумент3 страницыOnline Music QuizGiang VõОценок пока нет
- Newton Raphson Method MCQДокумент15 страницNewton Raphson Method MCQmd junaidОценок пока нет
- Funny Physics QuestionsДокумент3 страницыFunny Physics Questionsnek tsilОценок пока нет
- Nysc Editorial ManifestoДокумент2 страницыNysc Editorial ManifestoSolomon Samuel AdetokunboОценок пока нет