Вам также может понравиться
- CRI-40 Data Compression Techniques for Image DataДокумент26 страницCRI-40 Data Compression Techniques for Image DataRami ReddyОценок пока нет
- Chapter 1Документ45 страницChapter 1Ravi SharmaОценок пока нет
- What Is The Need For Image Compression?Документ38 страницWhat Is The Need For Image Compression?rajeevrajkumarОценок пока нет
- Chapter 5 Data CompressionДокумент18 страницChapter 5 Data CompressionrpОценок пока нет
- Analysing Jpeg Coding With MaskingДокумент10 страницAnalysing Jpeg Coding With MaskingIJMAJournalОценок пока нет
- IMAGE COMPRESSION TECHNIQUES Ijariie1406 Volume 1 15 Page 100 105Документ6 страницIMAGE COMPRESSION TECHNIQUES Ijariie1406 Volume 1 15 Page 100 105مصعب جاسمОценок пока нет
- Dip 4 Unit NotesДокумент10 страницDip 4 Unit NotesMichael MariamОценок пока нет
- 3 Vol 15 No 1Документ6 страниц3 Vol 15 No 1alkesh.engОценок пока нет
- Ijcse V2i2p1Документ5 страницIjcse V2i2p1ISAR-PublicationsОценок пока нет
- Asynchronous (Cervo Ramboyong)Документ16 страницAsynchronous (Cervo Ramboyong)Ira CervoОценок пока нет
- Digital Image Processing (Image Compression)Документ38 страницDigital Image Processing (Image Compression)MATHANKUMAR.S100% (2)
- Implementation of Image and Audio Compression Techniques UsingДокумент26 страницImplementation of Image and Audio Compression Techniques UsingHemanth KumarОценок пока нет
- Image Compression Models ExplainedДокумент2 страницыImage Compression Models ExplainedKrishanu ModakОценок пока нет
- Image Compression Coding SchemesДокумент96 страницImage Compression Coding Schemesresmi_ng50% (4)
- Lossless Data Compression Using Neural NetworksДокумент5 страницLossless Data Compression Using Neural NetworksArthaelsОценок пока нет
- Real Time Implementation of Image Recognition and Text To Speech ConversionДокумент5 страницReal Time Implementation of Image Recognition and Text To Speech ConversionijaertОценок пока нет
- Image Compression FundamentalsДокумент84 страницыImage Compression Fundamentalsresmi_ng85% (13)
- Image CompressionДокумент5 страницImage Compressionamt12202Оценок пока нет
- Compression and Decompression TechniquesДокумент68 страницCompression and Decompression TechniquesVarun JainОценок пока нет
- 5615 Ijcsa 06Документ11 страниц5615 Ijcsa 06Anonymous lVQ83F8mCОценок пока нет
- Video Coding Basics ElementsДокумент8 страницVideo Coding Basics ElementsAdeoti OladapoОценок пока нет
- Compression Using Huffman CodingДокумент9 страницCompression Using Huffman CodingSameer SharmaОценок пока нет
- 13imagecompression 120321055027 Phpapp02Документ54 страницы13imagecompression 120321055027 Phpapp02Tripathi VinaОценок пока нет
- A19 Image Compression Using Pca TechniqueДокумент14 страницA19 Image Compression Using Pca TechniqueAshwin S PurohitОценок пока нет
- Wavelet Video Processing Technolog Full ReportДокумент20 страницWavelet Video Processing Technolog Full ReportKrishna Kumari Sahoo100% (1)
- MULTIMEDIA PROG ASSIGNMENT ONE Compression AlgorithmДокумент6 страницMULTIMEDIA PROG ASSIGNMENT ONE Compression AlgorithmBosa BossОценок пока нет
- Haar Wavelet Based Approach For Image Compression and Quality Assessment of Compressed ImageДокумент8 страницHaar Wavelet Based Approach For Image Compression and Quality Assessment of Compressed ImageLavanya NallamОценок пока нет
- Error Coding Reed SolomonДокумент28 страницError Coding Reed SolomonAnumОценок пока нет
- Lossless Image Compression Algorithm For Transmitting Over Low Bandwidth LineДокумент6 страницLossless Image Compression Algorithm For Transmitting Over Low Bandwidth Lineeditor_ijarcsseОценок пока нет
- Modified Skip Line Encoding For Binary Image CompressionДокумент4 страницыModified Skip Line Encoding For Binary Image CompressionidescitationОценок пока нет
- Digital Image Processing U8Документ5 страницDigital Image Processing U8Kpsteja TejaОценок пока нет
- Digital Image Processing Unit-8Документ4 страницыDigital Image Processing Unit-8Kpsteja TejaОценок пока нет
- The Novel Broadcast Encryption Method For Large Dynamically Changing User GroupsДокумент8 страницThe Novel Broadcast Encryption Method For Large Dynamically Changing User GroupsRavindra KumarОценок пока нет
- Novel Methods For Video Compression Techniques Survey PaperДокумент6 страницNovel Methods For Video Compression Techniques Survey PaperNicole VerdugoОценок пока нет
- New Error Model of Entropy Encoding For Image Compression: Volume 2, Issue 2, March - April 2013Документ5 страницNew Error Model of Entropy Encoding For Image Compression: Volume 2, Issue 2, March - April 2013International Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Presentation On Image CompressionДокумент28 страницPresentation On Image Compressionbushra819100% (2)
- Multimedia Systems Chapter 9Документ6 страницMultimedia Systems Chapter 9Tolosa TafeseОценок пока нет
- A Different Approach For Spatial Prediction and Transform Using Video Image CodingДокумент6 страницA Different Approach For Spatial Prediction and Transform Using Video Image CodingInternational Organization of Scientific Research (IOSR)Оценок пока нет
- CalicДокумент4 страницыCalicgunjan2006Оценок пока нет
- Image Compression Using Run Length Encoding (RLE)Документ6 страницImage Compression Using Run Length Encoding (RLE)Editor IJRITCCОценок пока нет
- Chapter Six 6A ICДокумент30 страницChapter Six 6A ICRobera GetachewОценок пока нет
- Image Compression Techniques and StandardsДокумент27 страницImage Compression Techniques and StandardsMeenalochini GanesanОценок пока нет
- Ijart079 PDFДокумент5 страницIjart079 PDFStephen RajОценок пока нет
- Investigations On Reduction of Compression Artifacts in Digital Images Using Deep LearningДокумент4 страницыInvestigations On Reduction of Compression Artifacts in Digital Images Using Deep LearningBalachander RajasekarОценок пока нет
- Chapter 2 Digital Image CompressionДокумент12 страницChapter 2 Digital Image CompressionKetan SharmaОценок пока нет
- DIGITAL IMAGE PROCESSING: IMAGE COMPRESSION TECHNIQUES EXPLAINEDДокумент54 страницыDIGITAL IMAGE PROCESSING: IMAGE COMPRESSION TECHNIQUES EXPLAINEDmanasiОценок пока нет
- Image Compression Approaches: A Comprehensive Study: Akul S, Kavitha S NДокумент3 страницыImage Compression Approaches: A Comprehensive Study: Akul S, Kavitha S NerpublicationОценок пока нет
- Define Psychovisual RedundancyДокумент3 страницыDefine Psychovisual RedundancyKhalandar BashaОценок пока нет
- Chapter - 5 Data CompressionДокумент8 страницChapter - 5 Data CompressionsiddharthaОценок пока нет
- 3.multimedia Compression AlgorithmsДокумент23 страницы3.multimedia Compression Algorithmsaishu sillОценок пока нет
- Literature Review On Different Compression TechniquesДокумент5 страницLiterature Review On Different Compression TechniquesInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Chapter 10 CompressionДокумент66 страницChapter 10 CompressionSandhya PandeyОценок пока нет
- 4.2.1. Overview of JPEG: What Is ?Документ13 страниц4.2.1. Overview of JPEG: What Is ?rekhasseОценок пока нет
- Digital Photography and Video EditingДокумент8 страницDigital Photography and Video EditingEdwin MugoОценок пока нет
- Architecture-Aware Optimization Strategies in Real-time Image ProcessingОт EverandArchitecture-Aware Optimization Strategies in Real-time Image ProcessingОценок пока нет
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESОт EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESОценок пока нет
- DBSCANДокумент119 страницDBSCANKalpanaMohanОценок пока нет
- Access Control Model Based On Role and Attribute and Formal VerificationДокумент10 страницAccess Control Model Based On Role and Attribute and Formal VerificationKalpanaMohanОценок пока нет
- Instructions For Typesetting Manuscripts Using MswordДокумент6 страницInstructions For Typesetting Manuscripts Using MswordKalpanaMohanОценок пока нет
- Preserving Privacy and Deduplication On-OkДокумент11 страницPreserving Privacy and Deduplication On-OkKalpanaMohanОценок пока нет
- Digital Communications and Networks: Yaira K. Rivera S Anchez, Steven A. Demurjian, Mohammed S. BaihanДокумент12 страницDigital Communications and Networks: Yaira K. Rivera S Anchez, Steven A. Demurjian, Mohammed S. BaihanKalpanaMohanОценок пока нет
- Information Security Viii Semester: Department of Computer Science and Engineering (DEC 2019 - APR 2020)Документ46 страницInformation Security Viii Semester: Department of Computer Science and Engineering (DEC 2019 - APR 2020)KalpanaMohanОценок пока нет
- Automated Extraction of Attributes From Natural Language Attribute-Based Access Control (ABAC) PoliciesДокумент25 страницAutomated Extraction of Attributes From Natural Language Attribute-Based Access Control (ABAC) PoliciesKalpanaMohanОценок пока нет
- Journal of King Saud University - Computer and Information SciencesДокумент14 страницJournal of King Saud University - Computer and Information SciencesKalpanaMohanОценок пока нет
- Achieving Secure Role-based Access Control on Encrypted Data in Cloud StorageДокумент14 страницAchieving Secure Role-based Access Control on Encrypted Data in Cloud StorageKalpanaMohanОценок пока нет
- Part - B Answer All The Questions 5 X 11 55Документ1 страницаPart - B Answer All The Questions 5 X 11 55KalpanaMohanОценок пока нет
- Sri Manakula Vinayagar Engineering College Information Security Risk ManagementДокумент39 страницSri Manakula Vinayagar Engineering College Information Security Risk ManagementKalpanaMohanОценок пока нет
- Department of Computer Science and Engineering: Ms. J.Kanimozhi, Ap/CseДокумент42 страницыDepartment of Computer Science and Engineering: Ms. J.Kanimozhi, Ap/CseKalpanaMohanОценок пока нет
- SyllabusДокумент60 страницSyllabussatish2188Оценок пока нет
- Graphics and Image Processing Course OverviewДокумент47 страницGraphics and Image Processing Course OverviewKalpanaMohanОценок пока нет
- GIP 3 NewДокумент40 страницGIP 3 NewKalpanaMohanОценок пока нет
- Cs655 Unit IIДокумент27 страницCs655 Unit IIKalpanaMohanОценок пока нет
- IS Model QPДокумент2 страницыIS Model QPKalpanaMohanОценок пока нет
- Cs655 Unit IДокумент14 страницCs655 Unit IKalpanaMohanОценок пока нет
- Data Warehouse Architecture and Design StepsДокумент80 страницData Warehouse Architecture and Design StepsKalpanaMohanОценок пока нет
- Special Elective Request Form Sathyabama UniversityДокумент1 страницаSpecial Elective Request Form Sathyabama UniversityKalpanaMohanОценок пока нет
- SIMPLE PROGRAMMING EXAMPLESДокумент40 страницSIMPLE PROGRAMMING EXAMPLESKalpanaMohanОценок пока нет
- OOADДокумент72 страницыOOADcsharada14Оценок пока нет
- Web Tech Notes FullДокумент191 страницаWeb Tech Notes FullKalpanaMohan100% (1)
- PROFIBUS UFP11A Fieldbus InterfaceДокумент44 страницыPROFIBUS UFP11A Fieldbus InterfacethordalsОценок пока нет
- VMM RAL NotesДокумент10 страницVMM RAL NotesJyothi ShrinivasОценок пока нет
- Cse 351 Unit Summary 1 Task 1Документ1 страницаCse 351 Unit Summary 1 Task 1api-522855390Оценок пока нет
- Binary and Decimal Numbers: Prof. RosenthalДокумент64 страницыBinary and Decimal Numbers: Prof. RosenthalRods VargasОценок пока нет
- Fundamentals of IT ManualДокумент98 страницFundamentals of IT ManualUmmRahmaОценок пока нет
- Unit 11 12 13 14Документ21 страницаUnit 11 12 13 14George BanucuОценок пока нет
- Lab 7 2023Документ19 страницLab 7 2023Bhakti MatsyapalОценок пока нет
- Assignment 6 - JARANTILLAДокумент1 страницаAssignment 6 - JARANTILLALeague of RònОценок пока нет
- Memory Definitions Random Access Memory (RAM) Static RAM (SRAM) Integrated CircuitsДокумент24 страницыMemory Definitions Random Access Memory (RAM) Static RAM (SRAM) Integrated CircuitsHimanshiОценок пока нет
- Computer & Interfacing Chapter TwoДокумент32 страницыComputer & Interfacing Chapter TwomigadОценок пока нет
- Mam 6090Документ43 страницыMam 6090steve@air-innovations.co.za100% (3)
- NnnununmimДокумент113 страницNnnununmimHeenaОценок пока нет
- Ibs Ip 400 Me-Elr 1-3a Di4Документ54 страницыIbs Ip 400 Me-Elr 1-3a Di4WillianSilvaОценок пока нет
- STW 44-3-4 - Model Course AE Chief and Second Engineer Officer Secretariat1Документ204 страницыSTW 44-3-4 - Model Course AE Chief and Second Engineer Officer Secretariat1Seba BayramОценок пока нет
- Pages From Bicsi TerminologyДокумент66 страницPages From Bicsi Terminologypurit83Оценок пока нет
- برمجهДокумент35 страницبرمجهمرتضى وليد عبد الجبار / م - 88Оценок пока нет
- ITWELEC6 - Lab Exercise No 2 - SteganographyДокумент6 страницITWELEC6 - Lab Exercise No 2 - SteganographyAljohn Mark ReyesОценок пока нет
- CprogramДокумент104 страницыCprogramHrithik JerathОценок пока нет
- 700 - Computer Questions AnswersДокумент66 страниц700 - Computer Questions AnswersManyam KummariОценок пока нет
- Understanding Number SystemsДокумент82 страницыUnderstanding Number Systemsmuhammad javaidОценок пока нет
- SEPAM 2000 ModbusДокумент50 страницSEPAM 2000 Modbuslam9021Оценок пока нет
- Canon XU-80 XU-81 Programmers ManualДокумент153 страницыCanon XU-80 XU-81 Programmers ManualMattBlank100% (1)
- Basic MCQs of Computer ScienceДокумент44 страницыBasic MCQs of Computer Scienceaftab20Оценок пока нет
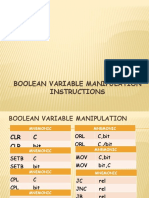
- Boolean Variable Manipulation InstructionsДокумент52 страницыBoolean Variable Manipulation InstructionssinxcosxОценок пока нет
- Sun Tracking System With Microcontroller 8051Документ5 страницSun Tracking System With Microcontroller 8051อธิราษฎร์ ดำดีОценок пока нет
- CS 2421 Lab 2Документ4 страницыCS 2421 Lab 2Mani KamaliОценок пока нет
- Aqa Gcse Computer Science (8520) : Knowledge OrganisersДокумент45 страницAqa Gcse Computer Science (8520) : Knowledge OrganisersShakila Shaki100% (1)
- 530BID01 DS en PDFДокумент4 страницы530BID01 DS en PDFHatem LaadhariОценок пока нет
- Computer Notes 1 Year Chapter # 1 Short Questions (According To Alp)Документ4 страницыComputer Notes 1 Year Chapter # 1 Short Questions (According To Alp)Nb KashifОценок пока нет
- Practical No.09 To Become Familiar With Arithmetic and Logical InstructionsДокумент8 страницPractical No.09 To Become Familiar With Arithmetic and Logical InstructionsVishal KumarОценок пока нет