Вам также может понравиться
- Induction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorДокумент9 страницInduction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorRajeev ValunjkarОценок пока нет
- Braking Schemes of TractionДокумент7 страницBraking Schemes of TractionSuraj BhushanОценок пока нет
- Induction Motor Braking - Regenerative, Plugging &+ PDFДокумент8 страницInduction Motor Braking - Regenerative, Plugging &+ PDFTechnical boxОценок пока нет
- Kreatryx Koncept Pock PDFДокумент8 страницKreatryx Koncept Pock PDFTechnical boxОценок пока нет
- Electrical Machine - 2 Lab ManualДокумент50 страницElectrical Machine - 2 Lab ManualMohit ChetiwalОценок пока нет
- Principle Operation of Synchronous MotorДокумент9 страницPrinciple Operation of Synchronous MotorGideon MoyoОценок пока нет
- Induction Motor BrakingДокумент7 страницInduction Motor BrakingJM4 - AОценок пока нет
- Ankit Kumar Singh EdДокумент50 страницAnkit Kumar Singh EdAnkit SinghОценок пока нет
- Electrical Machines Final AssignmentДокумент13 страницElectrical Machines Final Assignmentaamir.faiazОценок пока нет
- Electric BrakingДокумент28 страницElectric BrakingSabir BanvaОценок пока нет
- Electrical Braking of Three Phase Induct PDFДокумент4 страницыElectrical Braking of Three Phase Induct PDFFranc Lami100% (1)
- Regenerative Braking of Induction MotorДокумент27 страницRegenerative Braking of Induction MotorcoolkannaОценок пока нет
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFДокумент7 страницInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiОценок пока нет
- Induction MotorДокумент43 страницыInduction MotorJanine Jade SetiasОценок пока нет
- Chapter-2: Dynamic Behavior of Electric DrivesДокумент43 страницыChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasОценок пока нет
- Answers 4,5,6Документ8 страницAnswers 4,5,6Mohsin TariqОценок пока нет
- Bee Unit4Документ66 страницBee Unit4DOMAKONDA NEHA SE(H)2019Оценок пока нет
- 3 - Starter, Braking, EtcДокумент22 страницы3 - Starter, Braking, EtcAtul Jaysing PatilОценок пока нет
- SUB. BY:-Satinder Thakur RB4802B52 Regd:-1812444Документ7 страницSUB. BY:-Satinder Thakur RB4802B52 Regd:-1812444shailesh singhОценок пока нет
- Unit-5 SMДокумент27 страницUnit-5 SMShaik ShaheenaОценок пока нет
- Electrical BrakingДокумент19 страницElectrical BrakingAnilОценок пока нет
- Synchronous Motor & Its Applications & Power Factor ImprovementДокумент4 страницыSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalОценок пока нет
- DC Compound MotorsДокумент5 страницDC Compound MotorsDionimar DiscionОценок пока нет
- Principle of Operation Synchronous MotorДокумент3 страницыPrinciple of Operation Synchronous MotorSreejith SreekumarОценок пока нет
- Motorola Application NotesДокумент10 страницMotorola Application Notesvasudeva yasasОценок пока нет
- A Synchronous MotorДокумент9 страницA Synchronous MotorOmed OthmanОценок пока нет
- How Much Watts Solar Panel We Need For Our Home Electrical Appliances?Документ6 страницHow Much Watts Solar Panel We Need For Our Home Electrical Appliances?SovanОценок пока нет
- Unit Ii Drive ChaacteristicsДокумент26 страницUnit Ii Drive Chaacteristicssaravanakmar vОценок пока нет
- Electric DrivesДокумент32 страницыElectric DrivessangsangicnuОценок пока нет
- Starting & Speeed Control of Three Phase Induction MotorsДокумент9 страницStarting & Speeed Control of Three Phase Induction MotorsAshutoshОценок пока нет
- Braking of Electric Motors: Need..... ?Документ8 страницBraking of Electric Motors: Need..... ?Ramesh VeerОценок пока нет
- Single Phase Induction MotorДокумент57 страницSingle Phase Induction MotorChristian Malaluan100% (1)
- Syncronous MotorДокумент22 страницыSyncronous MotorSambhav JainОценок пока нет
- Question No 1: Speed Control of DC MotorДокумент10 страницQuestion No 1: Speed Control of DC MotorProxima YusОценок пока нет
- Em - 16 MarksДокумент14 страницEm - 16 MarkskesavantОценок пока нет
- DC Motors Starters and Breaking MethodsДокумент25 страницDC Motors Starters and Breaking MethodsRukkuArunОценок пока нет
- Good Day!: Tanjuatco, Jahriel P. BseeДокумент32 страницыGood Day!: Tanjuatco, Jahriel P. BseeTanjuatco JahrielОценок пока нет
- MotorsДокумент7 страницMotorsVikramОценок пока нет
- Electrical Machines I: Week 13: Ward Leonard Speed Control and DC Motor BrakingДокумент15 страницElectrical Machines I: Week 13: Ward Leonard Speed Control and DC Motor Brakingmansoor.ahmed100Оценок пока нет
- Synchronous Motor Control PDFДокумент20 страницSynchronous Motor Control PDFPradeep_VashistОценок пока нет
- 3 PH Induction Motor IntroductionДокумент37 страниц3 PH Induction Motor IntroductionNaga Raju AngajalaОценок пока нет
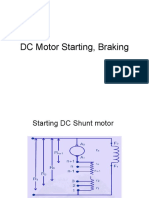
- DC Motor Starting, Braking Aug18Документ25 страницDC Motor Starting, Braking Aug18Ashwini Singh100% (1)
- DC Motors Starters and Breaking MethodsДокумент25 страницDC Motors Starters and Breaking Methodskrishnareddy_chintalaОценок пока нет
- Single Phase Induction MotorДокумент7 страницSingle Phase Induction MotorReeta Dutta100% (1)
- Motor StartersДокумент9 страницMotor Startersanon_896479742Оценок пока нет
- AC MotorsДокумент48 страницAC MotorsBrandon SookdeoОценок пока нет
- Starting Methods of 1-Phase & 3-Phase IMs - 100255KДокумент14 страницStarting Methods of 1-Phase & 3-Phase IMs - 100255KChamath Kirinde100% (2)
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorДокумент13 страницUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarОценок пока нет
- 1-Phase Induction MotorДокумент20 страниц1-Phase Induction MotorNure AlamОценок пока нет
- EES (Lec20)Документ16 страницEES (Lec20)Muhammad SagheerОценок пока нет
- AC Motors Starting and Protection SystemsДокумент32 страницыAC Motors Starting and Protection SystemsTarek MohamedОценок пока нет
- Repulsion Motor SSCJE QUICK NOTE1Документ5 страницRepulsion Motor SSCJE QUICK NOTE1bmanisankarОценок пока нет
- Unit 2 Single Phase Induction Motor - Watermark PDFДокумент21 страницаUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- DC Motor BrakeДокумент9 страницDC Motor BrakeAfkir Al-HusaineОценок пока нет
- 2365 02 l2 202 Handout 25Документ2 страницы2365 02 l2 202 Handout 25dvm4yfptzmОценок пока нет
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Документ22 страницыGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraОценок пока нет
- A New System of Alternating Current Motors and Transformers and Other EssaysОт EverandA New System of Alternating Current Motors and Transformers and Other EssaysРейтинг: 5 из 5 звезд5/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Solar (Slide)Документ49 страницSolar (Slide)SOURABH MONGRAОценок пока нет
- TGT (Medical) Tet - June 2019, Section - C, Q-69 - Answer Based On NCBI, NLM, NIH and Other WebsitesДокумент2 страницыTGT (Medical) Tet - June 2019, Section - C, Q-69 - Answer Based On NCBI, NLM, NIH and Other WebsitesSOURABH MONGRAОценок пока нет
- Introduction (Slide)Документ25 страницIntroduction (Slide)SOURABH MONGRAОценок пока нет
- Digital Signal Processing by Ramesh Babu PDFДокумент303 страницыDigital Signal Processing by Ramesh Babu PDFSOURABH MONGRAОценок пока нет
- Hydropower Plant ReportДокумент8 страницHydropower Plant ReportSOURABH MONGRAОценок пока нет
- Comparing Spectrum Utilization Using Fuzzy Logic System For Heterogeneous Wireless Networks Via Cognitive RadioДокумент10 страницComparing Spectrum Utilization Using Fuzzy Logic System For Heterogeneous Wireless Networks Via Cognitive RadioSOURABH MONGRAОценок пока нет
- CP553: Neural Networks and Fuzzy Logic: L T P C ESE CE ESE CE 3 0 2 5 70 30 30 20 150Документ2 страницыCP553: Neural Networks and Fuzzy Logic: L T P C ESE CE ESE CE 3 0 2 5 70 30 30 20 150SOURABH MONGRAОценок пока нет
- YjgykGy PDFДокумент21 страницаYjgykGy PDFSOURABH MONGRAОценок пока нет
- AMTED398078EN Part2 (Web)Документ54 страницыAMTED398078EN Part2 (Web)jobpei2Оценок пока нет
- Meralco AnalysisДокумент7 страницMeralco AnalysisjemОценок пока нет
- Earthing RequirementДокумент7 страницEarthing RequirementSandy ChoudhariОценок пока нет
- TPL76C Manual PDFДокумент139 страницTPL76C Manual PDFEhsan0% (1)
- Proposal 511 - SBU - Royal Haskoning - CompAir L90 Package - 2017Документ10 страницProposal 511 - SBU - Royal Haskoning - CompAir L90 Package - 2017Iskandar HasibuanОценок пока нет
- Commander GP: General Purpose AC Variable Speed Drive (0.75 To 110 KW)Документ6 страницCommander GP: General Purpose AC Variable Speed Drive (0.75 To 110 KW)carlosorizabaОценок пока нет
- Energy Engg.-Lab ManualДокумент51 страницаEnergy Engg.-Lab ManualManish JhadhavОценок пока нет
- Gravitation Power Generation Grom GravityДокумент30 страницGravitation Power Generation Grom GravityAlmubeen0% (1)
- Diamer Basha DamДокумент6 страницDiamer Basha DamKashif Ali Hasnain0% (1)
- Shanghai Greenport MasterplanДокумент146 страницShanghai Greenport MasterplanApriadi Budi RaharjaОценок пока нет
- Determination of Certified Relieving CapacitiesДокумент6 страницDetermination of Certified Relieving CapacitiesGustavo GarciaОценок пока нет
- Chemistry Project: Saturated Solutions: Measuring SolubilityДокумент8 страницChemistry Project: Saturated Solutions: Measuring SolubilityAbhay Kumar NayakОценок пока нет
- Symmetric Bending of Beams: Learning ObjectivesДокумент0 страницSymmetric Bending of Beams: Learning ObjectivesWijayanto BekasiОценок пока нет
- Mobile Data Center Solutions: High CubeДокумент5 страницMobile Data Center Solutions: High CuberezaОценок пока нет
- R ChidambaramДокумент2 страницыR Chidambaramshridhar sutarОценок пока нет
- Technical Capabilities PDI 2019 09Документ10 страницTechnical Capabilities PDI 2019 09carlosОценок пока нет
- DeVries1992 Book AnalysisOfMaterialRemovalProceДокумент270 страницDeVries1992 Book AnalysisOfMaterialRemovalProceRoberto Jorge Bezerra LauristonОценок пока нет
- DowsingДокумент76 страницDowsingBacean Aurel IoanОценок пока нет
- HS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Документ11 страницHS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Nhí LêОценок пока нет
- WHS PRO 004 Maintenance of Equipment ProcedureДокумент10 страницWHS PRO 004 Maintenance of Equipment ProcedureWekesa RobinsonОценок пока нет
- Orbital WeldingДокумент20 страницOrbital WeldingAshishBohra0% (2)
- Handbook For Radiological MonitorsДокумент44 страницыHandbook For Radiological MonitorsChó MèoОценок пока нет
- May Monthly Report GasperДокумент14 страницMay Monthly Report GasperOWTCОценок пока нет
- Brochure Ret 670Документ4 страницыBrochure Ret 670Vishwanath TodurkarОценок пока нет
- How To Choose An EPC Contractor For PV ProjectsДокумент14 страницHow To Choose An EPC Contractor For PV Projectsavnish_parashar9292Оценок пока нет
- BSI, BSII, BSIII, BSIV and BSVI Are Bharat Stage Emission Standards (BSES) That Have Been Instituted by The Government of IndiaДокумент6 страницBSI, BSII, BSIII, BSIV and BSVI Are Bharat Stage Emission Standards (BSES) That Have Been Instituted by The Government of IndiaAnbarasu AthimoolamОценок пока нет
- Volvo Engine BrakeДокумент7 страницVolvo Engine BrakeIzz Bahar100% (1)
- Discussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, QДокумент7 страницDiscussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, Qrei ayanamiОценок пока нет
- c2Документ145 страницc2sathish kumarОценок пока нет