Вам также может понравиться
- Sensors 15Документ26 страницSensors 15zack988Оценок пока нет
- Advanced Condition Monitoring and Fault Embedded Expert System Diagnosis Turbo-Alternators Using AnДокумент4 страницыAdvanced Condition Monitoring and Fault Embedded Expert System Diagnosis Turbo-Alternators Using AnOihane GomezОценок пока нет
- School Zone Safety System Based On Wireless SensorДокумент21 страницаSchool Zone Safety System Based On Wireless SensorakashlogicОценок пока нет
- Investigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographДокумент11 страницInvestigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographJabezОценок пока нет
- Proposal For ResearchДокумент11 страницProposal For ResearchMuhammad AdeelОценок пока нет
- CD Paper Pag 113Документ10 страницCD Paper Pag 113Anonymous lEBdswQXmxОценок пока нет
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningДокумент13 страницPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaОценок пока нет
- Automatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesДокумент18 страницAutomatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesMoazzam TiwanaОценок пока нет
- (X) Performance Evaluation of Object Detection and Tracking Systems (2006)Документ10 страниц(X) Performance Evaluation of Object Detection and Tracking Systems (2006)Hira RasabОценок пока нет
- Vector SAR measurement using calibrated vector probesДокумент24 страницыVector SAR measurement using calibrated vector probesvlouveauОценок пока нет
- RL-Based Topology Control for WSNsДокумент7 страницRL-Based Topology Control for WSNsVipin DixitОценок пока нет
- Bridge StructureДокумент6 страницBridge StructureJournalNX - a Multidisciplinary Peer Reviewed JournalОценок пока нет
- Sensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemДокумент18 страницSensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemDeni Agustina JОценок пока нет
- Redes Neuronales - Aplicación y Oportunidades en AeronáuticaДокумент6 страницRedes Neuronales - Aplicación y Oportunidades en AeronáuticaVany BraunОценок пока нет
- Fast Calculation Method of Abnormality Degree For Real Time Abnormality Detection in Vehicle EquipmentДокумент7 страницFast Calculation Method of Abnormality Degree For Real Time Abnormality Detection in Vehicle EquipmentpriyankaprashaanthОценок пока нет
- Model-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical ModelsДокумент6 страницModel-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical Modelsejlebe mekaniОценок пока нет
- A Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentДокумент13 страницA Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentNinh DuyОценок пока нет
- Automatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesДокумент18 страницAutomatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesPranaviAgarwalОценок пока нет
- Synopsis PDFДокумент7 страницSynopsis PDFomkar chitnisОценок пока нет
- Wireless Sensor Network Simulators A Survey and Comparisons: Harsh SundaniДокумент17 страницWireless Sensor Network Simulators A Survey and Comparisons: Harsh Sundanisafdar-abbasОценок пока нет
- ExtendedAbstract Nuno Mocho 69712Документ9 страницExtendedAbstract Nuno Mocho 69712Joshua KarthikОценок пока нет
- Tracking algorithm using cost-reference particle filteringДокумент8 страницTracking algorithm using cost-reference particle filteringSonali DasОценок пока нет
- Optimal Monitor Activation Reduces Fault Localization TimeДокумент10 страницOptimal Monitor Activation Reduces Fault Localization TimeRidwan FauziОценок пока нет
- Power System Fault Classification and Prediction Based On A Three-Layer Data Mining StructureДокумент18 страницPower System Fault Classification and Prediction Based On A Three-Layer Data Mining StructureKoti ReddyОценок пока нет
- Smart Rail Pads For The Continuous Monitoring of Sensored Railway TracksДокумент14 страницSmart Rail Pads For The Continuous Monitoring of Sensored Railway TracksOficina técnica HermacastiОценок пока нет
- Test and Evaluation of Tactical MissileДокумент6 страницTest and Evaluation of Tactical MissileingferobaОценок пока нет
- sensors-17-00273Документ18 страницsensors-17-00273Gabriel VarelaОценок пока нет
- Journal Pre-Proof: Chaolong Zhang Yigang He Bolun Du Lifen Yuan Bing Li Shanhe JiangДокумент22 страницыJournal Pre-Proof: Chaolong Zhang Yigang He Bolun Du Lifen Yuan Bing Li Shanhe Jianggyilfu02Оценок пока нет
- Automation in Construction: Mathieu Lepot, Nikola Stani Ć, François H.L.R. ClemensДокумент11 страницAutomation in Construction: Mathieu Lepot, Nikola Stani Ć, François H.L.R. ClemenssulastriОценок пока нет
- suman presentania - Copy - Copy (3)Документ9 страницsuman presentania - Copy - Copy (3)Suman LenkaОценок пока нет
- 04 Chapter 01Документ12 страниц04 Chapter 01Mustafa khanОценок пока нет
- Exit Paper PDFДокумент24 страницыExit Paper PDFAlexandra MarpleОценок пока нет
- PHD Proposal.Документ11 страницPHD Proposal.Muhammad AdeelОценок пока нет
- Deep Autoencoder Fault Detection in Electric MotorsДокумент11 страницDeep Autoencoder Fault Detection in Electric MotorsVictor SeguraОценок пока нет
- Accelerometer Sensor Data Analysis of Bridge Structural Health Monitoring SystemДокумент7 страницAccelerometer Sensor Data Analysis of Bridge Structural Health Monitoring Systemshamsukarim2009Оценок пока нет
- A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructureДокумент25 страницA Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructureOtras CosasОценок пока нет
- Classification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionДокумент9 страницClassification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionHanifОценок пока нет
- Multi-Sensor Fusion With Interaction Multiple ModelДокумент25 страницMulti-Sensor Fusion With Interaction Multiple ModelАржаев ВалентинОценок пока нет
- Massive Machine Type Communications: B. Tech Thesis Project: Phase I ReportДокумент19 страницMassive Machine Type Communications: B. Tech Thesis Project: Phase I ReportNilesh MittalОценок пока нет
- 0-MSSP Final PublishedДокумент17 страниц0-MSSP Final Published115Akshay RathodОценок пока нет
- Automation, Miniature Robotics and Sensors for NDEДокумент103 страницыAutomation, Miniature Robotics and Sensors for NDEAli AlhaikОценок пока нет
- Structural HealthmonitoringДокумент8 страницStructural HealthmonitoringDarshan LokeshОценок пока нет
- Nde Development For Bonded Honeycomb Structures Produced Using Non-Autoclave Manufacturing ProcessesДокумент15 страницNde Development For Bonded Honeycomb Structures Produced Using Non-Autoclave Manufacturing ProcessesSebastian AndreoliОценок пока нет
- Sensors 19 00648Документ29 страницSensors 19 00648qwertzuiopОценок пока нет
- Wide Area Fault Detection Rule BaedДокумент10 страницWide Area Fault Detection Rule Baedmachine learningОценок пока нет
- AI Integration for Nuclear Power Plant SurveillanceДокумент9 страницAI Integration for Nuclear Power Plant SurveillanceskmrsanjeevОценок пока нет
- Distance Measurement of An Object or Obstacle by Ultrasound Sensors Using P89C51RD2Документ5 страницDistance Measurement of An Object or Obstacle by Ultrasound Sensors Using P89C51RD2vijay ARОценок пока нет
- A PCA-LSTM-Based Method For Fault Diagnosis and Data - Trafos SecosДокумент17 страницA PCA-LSTM-Based Method For Fault Diagnosis and Data - Trafos SecosTami CunzaОценок пока нет
- Journal Report (1) - 1Документ8 страницJournal Report (1) - 1devagithub007Оценок пока нет
- Sensors: A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructuresДокумент25 страницSensors: A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite Structuresathar shahzadОценок пока нет
- A New Wavelet Based SVM Classifier For Wild Fire Detection Using Decision Fusion Framework in VideoДокумент8 страницA New Wavelet Based SVM Classifier For Wild Fire Detection Using Decision Fusion Framework in VideoInternational Organization of Scientific Research (IOSR)Оценок пока нет
- Merging Probabilistic Data of Multiple Targets Detected by Multiple SensorsДокумент17 страницMerging Probabilistic Data of Multiple Targets Detected by Multiple SensorsLegna LopezОценок пока нет
- A Framework For Intelligent Sensor Network With Video Camera For Structural Health Monitoring of BridgesДокумент5 страницA Framework For Intelligent Sensor Network With Video Camera For Structural Health Monitoring of BridgesAnusha Kommineni100% (1)
- Cjme 2014 03 475Документ8 страницCjme 2014 03 475HASSANE HOTAITОценок пока нет
- Evaluating System PerformanceДокумент17 страницEvaluating System PerformanceAliyu SaniОценок пока нет
- Sensors 22 09064Документ22 страницыSensors 22 09064Naseer AhmedОценок пока нет
- Sensordevices 2018 7 20 20073Документ7 страницSensordevices 2018 7 20 20073Prasika YogaОценок пока нет
- Business Aspect of SHM and SHM SystemsДокумент6 страницBusiness Aspect of SHM and SHM SystemsKubana ThierryОценок пока нет
- M.S. Civil Engineering Program Exit PaperДокумент24 страницыM.S. Civil Engineering Program Exit PaperAlexandra MarpleОценок пока нет
- ISM Band in Wireless Communication Aspects For Embedded Strain Measure Systems in Mechanical StructuresДокумент7 страницISM Band in Wireless Communication Aspects For Embedded Strain Measure Systems in Mechanical StructuresPiotr PietrzakОценок пока нет
- Balancing TheoryДокумент181 страницаBalancing TheoryDANE8083% (6)
- Signal Conditioning Based On Programmable Analog Circuits - PoprДокумент6 страницSignal Conditioning Based On Programmable Analog Circuits - PoprPiotr PietrzakОценок пока нет
- Global Curve Fitting of Frequency Response Measurements Using The Rational Fraction Polynomial MethodДокумент8 страницGlobal Curve Fitting of Frequency Response Measurements Using The Rational Fraction Polynomial MethodsalyОценок пока нет
- Mechatronics in Rotating MachineryДокумент16 страницMechatronics in Rotating MachineryPiotr PietrzakОценок пока нет
- Downtime Priorities & Jackknife DiagramsДокумент14 страницDowntime Priorities & Jackknife DiagramsRicardo Zambrano Monsalvez100% (2)
- 내부 소개자료 - V2.0 PDFДокумент44 страницы내부 소개자료 - V2.0 PDF최재호Оценок пока нет
- Industrial MaintenanceДокумент2 страницыIndustrial MaintenanceJonny SinglaОценок пока нет
- Diploma in Civil EngineeringДокумент162 страницыDiploma in Civil EngineeringFaiz RahmanОценок пока нет
- 5-Embodiment DesignДокумент52 страницы5-Embodiment DesignTt OwnsqqОценок пока нет
- CBAP IIBA Certified Business Analysis PRДокумент10 страницCBAP IIBA Certified Business Analysis PRThái SơnОценок пока нет
- CS8494 Softwareengineering-Unit IiДокумент69 страницCS8494 Softwareengineering-Unit Iijohn8870Оценок пока нет
- Naeem Ahmad's Resume for Associate Engineer TelecomДокумент2 страницыNaeem Ahmad's Resume for Associate Engineer TelecomAhmed Awan AhmedОценок пока нет
- Contact Foundry for Quality CastingsДокумент12 страницContact Foundry for Quality CastingsAlfianОценок пока нет
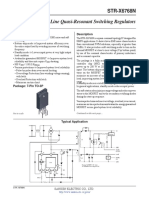
- str-x6768n Ds en PDFДокумент9 страницstr-x6768n Ds en PDFCarlОценок пока нет
- BSC 6910Документ41 страницаBSC 6910abdirashiidОценок пока нет
- QLD Manual For Assessing Consequence Categories and Hydraulic Performance of StructuresДокумент34 страницыQLD Manual For Assessing Consequence Categories and Hydraulic Performance of StructuresShehan UdukumburageОценок пока нет
- Questionnaire For Client AcquisitionДокумент4 страницыQuestionnaire For Client Acquisitionvikramnmba100% (1)
- Performance of Histamine Test Kits For Applications To SeafoodДокумент9 страницPerformance of Histamine Test Kits For Applications To SeafoodGeraldine Pardo MariluzОценок пока нет
- BPA AC Substation Asset Management StrategyДокумент147 страницBPA AC Substation Asset Management StrategydkymqОценок пока нет
- Processsafetykpi 12750516909647 Phpapp02Документ17 страницProcesssafetykpi 12750516909647 Phpapp02Baâddi AyoubОценок пока нет
- En ACS800singledrivescatalog REVKДокумент64 страницыEn ACS800singledrivescatalog REVKMarcelo Walesko de MacedoОценок пока нет
- MTTR & MTBF Calculation in SAP PMДокумент3 страницыMTTR & MTBF Calculation in SAP PMSaif Ali MominОценок пока нет
- DC-DC Converter Reliability Design and TestingДокумент16 страницDC-DC Converter Reliability Design and TestinggirisanaОценок пока нет
- Guideline For Establishing Criticality Rankings For Fossil Power Plant Systems and ComponentsДокумент70 страницGuideline For Establishing Criticality Rankings For Fossil Power Plant Systems and Componentsenjiniring sbkl100% (1)
- 6050 PDFДокумент16 страниц6050 PDFTropic ThunderОценок пока нет
- cs341 Ho1Документ12 страницcs341 Ho1Tumelo O MogokgwaneОценок пока нет
- Case Study on Performance and Risk of Large Wastewater PumpsДокумент8 страницCase Study on Performance and Risk of Large Wastewater PumpsMira FazziraОценок пока нет
- Dimensionamento de Eixos (Shigley)Документ54 страницыDimensionamento de Eixos (Shigley)Alexandre LaraОценок пока нет
- TB6588FG Usage Considerations: 1. Absolute Maximum RatingsДокумент10 страницTB6588FG Usage Considerations: 1. Absolute Maximum RatingsElton RibeiroОценок пока нет
- M 2 Prosper AideyanДокумент32 страницыM 2 Prosper AideyanJorgito AriasОценок пока нет
- ALPHA SNCX Plus 07 SolderДокумент32 страницыALPHA SNCX Plus 07 SolderYounes Ben TaherОценок пока нет
- ARGUS 606 S Syringe Pump Training & Competency GuideДокумент25 страницARGUS 606 S Syringe Pump Training & Competency GuideMalik IbrahimОценок пока нет
- Curriculum GuideДокумент14 страницCurriculum GuideCaio MarchiОценок пока нет
- 1104A-44TG1 ElectropaK (PN1783 75th)Документ2 страницы1104A-44TG1 ElectropaK (PN1783 75th)OGОценок пока нет