Вам также может понравиться
- Control de Motores IIДокумент20 страницControl de Motores IIChuy Martinez OrtegaОценок пока нет
- MANUAL Control de Motores IДокумент58 страницMANUAL Control de Motores IRicardo Mugartegui SotoОценок пока нет
- Cargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoОт EverandCargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoОценок пока нет
- Control de Motores EléctricosДокумент14 страницControl de Motores Eléctricosrobotica industrialОценок пока нет
- Práctica 12 Motores y RelevadoresДокумент8 страницPráctica 12 Motores y RelevadoresAdrián ZatarainОценок пока нет
- Manual Didáctico Control de Motores EléctricosДокумент118 страницManual Didáctico Control de Motores EléctricosAngye M Ber100% (2)
- Automatismos y Sistema de Arranque de Maquinas ElectricasДокумент7 страницAutomatismos y Sistema de Arranque de Maquinas ElectricasAndres Kamilo CabraОценок пока нет
- Cap 5 Electricidad Magnetismo y ElectromagnetismoДокумент26 страницCap 5 Electricidad Magnetismo y ElectromagnetismoMario HernandezОценок пока нет
- EN02 Diseno, Operacion y Mantenimiento de Sistema de Control ElectricoДокумент65 страницEN02 Diseno, Operacion y Mantenimiento de Sistema de Control Electricotimecop74478Оценок пока нет
- Mantenimiento A Motores El CTRДокумент0 страницMantenimiento A Motores El CTRAlexis Fischer YLОценок пока нет
- Mantenimiento eléctrico electrónicoДокумент8 страницMantenimiento eléctrico electrónicoVianey Guadalupe100% (1)
- Automatización por contactoresДокумент64 страницыAutomatización por contactoresAndresLozadaОценок пока нет
- No 02-1 Arranque Directo Del Motor de Induccion TrifasicoДокумент38 страницNo 02-1 Arranque Directo Del Motor de Induccion TrifasicoEduard Nayef Baltazar IbarraОценок пока нет
- Control dispositivos eléctricos máquinasДокумент41 страницаControl dispositivos eléctricos máquinasDavid Addy Sánchez PerezОценок пока нет
- Manual de Maquinas ElectricasДокумент12 страницManual de Maquinas ElectricasARELY ALONDRA CORDOBA VALENCIAОценок пока нет
- Arranque de Motor Estrella TrianguloДокумент9 страницArranque de Motor Estrella TrianguloJean Paul Herrera MoncayoОценок пока нет
- Medidas eléctricas instrumentosДокумент85 страницMedidas eléctricas instrumentoshector retuerto ramosОценок пока нет
- ControlMotoresEléctricosДокумент185 страницControlMotoresEléctricosEINER WILLIAM ALA BALTZAR100% (2)
- Inversión de giro motor trifásico y arranque estrella-triánguloДокумент9 страницInversión de giro motor trifásico y arranque estrella-triánguloRicardo VillarroelОценок пока нет
- Maquinas Herramientas CNC Torno..Документ144 страницыMaquinas Herramientas CNC Torno..exodia2014Оценок пока нет
- Máquinas Eléctricas: Relevadores y ContactoresДокумент11 страницMáquinas Eléctricas: Relevadores y ContactoresArmando Lopez HernandezОценок пока нет
- Tema 3 - Dispositivos de Control y Protección de PotenciaДокумент43 страницыTema 3 - Dispositivos de Control y Protección de PotenciaDaniels100% (1)
- Control motores eléctricosДокумент17 страницControl motores eléctricosDiana Melissa100% (1)
- Laboratorio de Circuitos EléctricosДокумент38 страницLaboratorio de Circuitos EléctricosCarlos Adrian Guillen BenitezОценок пока нет
- Guia Basica de Puesta en Marcha 3G3MX2 PDFДокумент2 страницыGuia Basica de Puesta en Marcha 3G3MX2 PDFAguirre Castillo Jose de JesusОценок пока нет
- Norma mexicana instalaciones eléctricasДокумент21 страницаNorma mexicana instalaciones eléctricasBilan BalcazarОценок пока нет
- Control de motores eléctricos principios generalesДокумент88 страницControl de motores eléctricos principios generalesLuis PérezОценок пока нет
- Notas Curso Propedéutico Matemáticas - Dr. Mohamed BadaouiДокумент132 страницыNotas Curso Propedéutico Matemáticas - Dr. Mohamed BadaouiVíctor Hugo Reséndiz Estrada100% (1)
- Tesis Control de Motores (Ale)Документ93 страницыTesis Control de Motores (Ale)Alejandro LopezОценок пока нет
- Leccion 1a CIM Motores Trifasicos 1-21Документ16 страницLeccion 1a CIM Motores Trifasicos 1-21tony trzОценок пока нет
- Calidad de La Energía en Sistemas Eléctricos IndustrialesДокумент208 страницCalidad de La Energía en Sistemas Eléctricos Industrialescharly_frankОценок пока нет
- Elementos de Control y Protección de MotoresДокумент8 страницElementos de Control y Protección de Motoresadiel leonОценок пока нет
- RotoresДокумент31 страницаRotoresyoworОценок пока нет
- Diagramas eléctricos: alambrado y controlДокумент2 страницыDiagramas eléctricos: alambrado y controlKleber PintoОценок пока нет
- Curso de Control de Motores ElectricosДокумент177 страницCurso de Control de Motores ElectricosErick Morales UrbinaОценок пока нет
- Manual de Practicas de Control de MotoresДокумент20 страницManual de Practicas de Control de MotoresTorres Pineda Osvaldo100% (1)
- Manual Practicas Diseño Asistido Por ComputadoraДокумент54 страницыManual Practicas Diseño Asistido Por ComputadoraFraOrz50% (2)
- Simbología de Los Instrumentos Analógicos para Mediciones EléctricasДокумент8 страницSimbología de Los Instrumentos Analógicos para Mediciones EléctricasAlex Apaza100% (1)
- Manual de Análisis y Diseño de Circuitos de Corriente Directa 2013 TeoríaДокумент176 страницManual de Análisis y Diseño de Circuitos de Corriente Directa 2013 TeoríaRafael Moran0% (1)
- Practica Estrella TrianguloДокумент7 страницPractica Estrella TrianguloalandeakerОценок пока нет
- Motores eléctricos: características, tipos y aplicacionesДокумент5 страницMotores eléctricos: características, tipos y aplicacionesrafaelОценок пока нет
- Calculo de La Malla de Puesta A Tierra de Una SubestaciónДокумент11 страницCalculo de La Malla de Puesta A Tierra de Una SubestaciónJulioОценок пока нет
- Teoria Leyes ElectricidadДокумент12 страницTeoria Leyes ElectricidadgerardoОценок пока нет
- Calculo de Las Corrientes de CortocircuitoДокумент46 страницCalculo de Las Corrientes de Cortocircuitomjimenezg100% (3)
- ElectroneumáticaДокумент4 страницыElectroneumáticaalanОценок пока нет
- Elementos de Control y AccionamientosДокумент24 страницыElementos de Control y AccionamientosJuanОценок пока нет
- MANUAL Control de Motores TrifasicosДокумент105 страницMANUAL Control de Motores TrifasicosFelipe Angel Ramirez Aparicio100% (1)
- Enunciado Practica3Документ4 страницыEnunciado Practica3zakaria rahmaniОценок пока нет
- Control Avanzado de Motores Eléctricos PDFДокумент13 страницControl Avanzado de Motores Eléctricos PDFAlberto LlamasОценок пока нет
- Motor DahlanderДокумент5 страницMotor DahlanderRobertoMendieta100% (1)
- Respuesta en frecuencia BJT PspiceДокумент19 страницRespuesta en frecuencia BJT PspiceJunior BautistaОценок пока нет
- Medición eléctrica con multímetrosДокумент21 страницаMedición eléctrica con multímetrosAlejandra CarcamoОценок пока нет
- Electricidad Ind 16Документ184 страницыElectricidad Ind 16negrin100% (1)
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208От EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Рейтинг: 3 из 5 звезд3/5 (1)
- 2 Control de MotoresДокумент20 страниц2 Control de MotoresdalexhmxОценок пока нет
- Control de motores eléctricosДокумент19 страницControl de motores eléctricosEduardo MartínezОценок пока нет
- 8 Laboratorio Dinamometro 2016-1Документ11 страниц8 Laboratorio Dinamometro 2016-1LhinCe Rojinegro100% (2)
- Pa VGTДокумент4 страницыPa VGTNicolas IgnacioОценок пока нет
- Plan de Entrenamiento Abb en Colombia PDFДокумент30 страницPlan de Entrenamiento Abb en Colombia PDFNoah Guillen MezaОценок пока нет
- Capitulo I Clasificacion de Vegetales PDFДокумент42 страницыCapitulo I Clasificacion de Vegetales PDFMaria Guadalupe Yaranga Avendaño90% (10)
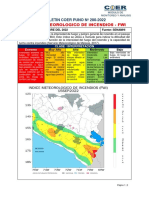
- Boletin #280-2022 Incendios ForestalesДокумент2 страницыBoletin #280-2022 Incendios ForestalesALEX HENRRY TAPARA CCAHUANAОценок пока нет
- Formación y desarrollo del talento humanoДокумент3 страницыFormación y desarrollo del talento humanoMelby de la rosaОценок пока нет
- 2022-06-15 Buen Uso Del AguaДокумент5 страниц2022-06-15 Buen Uso Del AguaDMC ELECTRICОценок пока нет
- Manual de Interventoria de CasanareДокумент6 страницManual de Interventoria de CasanareArTuro PaTerninaОценок пока нет
- Curr Tania QuispeДокумент6 страницCurr Tania QuispeGimena Quispe AchahuancoОценок пока нет
- METODOSДокумент10 страницMETODOSLuis Ibarguen MosqueraОценок пока нет
- Innovación en La Empresa Solorzano - HuánucoДокумент45 страницInnovación en La Empresa Solorzano - HuánucoFiorela LucapОценок пока нет
- Tecnología Orientada A ObjetosДокумент9 страницTecnología Orientada A ObjetosWill Trejo FloresОценок пока нет
- Laboratorio de Com. Ópticas - 1er Informe Previo 2019-2Документ6 страницLaboratorio de Com. Ópticas - 1er Informe Previo 2019-2Miguel Angel Pajuelo VillanuevaОценок пока нет
- Proyecto Final VerdaderoДокумент42 страницыProyecto Final Verdaderojennifer alva mОценок пока нет
- Definiciones Gestion ProfesionalДокумент13 страницDefiniciones Gestion ProfesionalNorlygissel Estrella100% (1)
- 2da Actividad 20%Документ5 страниц2da Actividad 20%eduardo fariasОценок пока нет
- (MO) F44126 Lavaloza CL44e (ESP) PDFДокумент41 страница(MO) F44126 Lavaloza CL44e (ESP) PDFAlexander AcostaОценок пока нет
- Proceso - 2022.02.27Документ84 страницыProceso - 2022.02.27Epi SidaОценок пока нет
- Ejercicios de Pensamiento Lateral - BilarrazaДокумент18 страницEjercicios de Pensamiento Lateral - BilarrazaFco Jose Rodriguez100% (1)
- SOAPIE: Gestión del cuidado de enfermeríaДокумент28 страницSOAPIE: Gestión del cuidado de enfermeríaKevin RamírezОценок пока нет
- Creacion de Listados en Valery 3Документ11 страницCreacion de Listados en Valery 3ELEANCAОценок пока нет
- U3-Video1-Modelo Relacional-Parte1 PDFДокумент24 страницыU3-Video1-Modelo Relacional-Parte1 PDFsteeven panchiОценок пока нет
- Nervio Olfatorio NC IДокумент4 страницыNervio Olfatorio NC IAlejandra Gonzalez CoronaОценок пока нет
- Estado de Situación Financiera TeoriaДокумент5 страницEstado de Situación Financiera TeoriaEdgar LemusОценок пока нет
- EXPANSION Y COMPRESION TeoricoДокумент9 страницEXPANSION Y COMPRESION TeoricoflamarrionОценок пока нет
- Franco P Villanueva MarceloДокумент1 страницаFranco P Villanueva MarceloMiguel Angel Marcelo TelloОценок пока нет
- B EsДокумент40 страницB EsCarlos A. ResendizОценок пока нет
- 4 - Estructura de FinanciamientoДокумент21 страница4 - Estructura de FinanciamientolaapreОценок пока нет
- Proyecto Costeo Final - Grupo5Документ15 страницProyecto Costeo Final - Grupo5Adriana CajalОценок пока нет
- Escala LiekrtДокумент8 страницEscala LiekrtPiero Kevin Cairo GamarraОценок пока нет
- Cotización para Ciclones DoblamosДокумент7 страницCotización para Ciclones DoblamosZapata JohnОценок пока нет
- Test Ejer Hasta Mitad Curso NonoДокумент56 страницTest Ejer Hasta Mitad Curso NonoPirate companYОценок пока нет
- Integración vertical AOL-Time WarnerДокумент10 страницIntegración vertical AOL-Time WarnerbrionyleslyОценок пока нет