Вам также может понравиться
- Ship Hydrodynamics Lecture Notes Part 2 Propeller GeometryДокумент10 страницShip Hydrodynamics Lecture Notes Part 2 Propeller Geometryborhec123Оценок пока нет
- Solid Mensuration 1Документ31 страницаSolid Mensuration 1Hanley Keith DiamsinОценок пока нет
- Thermal Properties of FoodДокумент5 страницThermal Properties of FoodMohamed100% (2)
- Distance Displacement Velocity Practice ProblemsДокумент2 страницыDistance Displacement Velocity Practice ProblemsBrasa Y. de Almira0% (1)
- SF024a-Flow Chart Design of A Wind Transverse GirderДокумент3 страницыSF024a-Flow Chart Design of A Wind Transverse GirderdvelchevОценок пока нет
- Virtual Work and Power BalanceДокумент5 страницVirtual Work and Power BalanceAlessio ScarabelliОценок пока нет
- 12 - Materials For Sour Service PDFДокумент50 страниц12 - Materials For Sour Service PDFAlessio Scarabelli67% (3)
- Su27 Eng 1Документ103 страницыSu27 Eng 1Alessio ScarabelliОценок пока нет
- Gauss' Law PDFДокумент22 страницыGauss' Law PDFPaul BryanОценок пока нет
- Using Displacement As Level MeasurementДокумент11 страницUsing Displacement As Level MeasurementAlessio ScarabelliОценок пока нет
- Honda V8 F1 EngineДокумент5 страницHonda V8 F1 EngineAlessio Scarabelli100% (2)
- Mass Moment InertiaДокумент7 страницMass Moment InertiaAlessio ScarabelliОценок пока нет
- Dytran Reference ManualДокумент866 страницDytran Reference ManualDon100% (2)
- Physics Lab On Free Fall (High School Level)Документ3 страницыPhysics Lab On Free Fall (High School Level)Kartik UgemugeОценок пока нет
- Analysis and Design of Air Intake of Scramjet Engine For Lower Starting Mach NumberДокумент22 страницыAnalysis and Design of Air Intake of Scramjet Engine For Lower Starting Mach NumberInternational Journal of Innovative Science and Research TechnologyОценок пока нет
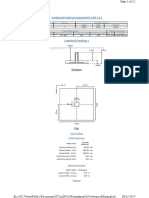
- Isolated Footing Design (ACI 318-11) : ElevationДокумент12 страницIsolated Footing Design (ACI 318-11) : ElevationAhmed Ben HmidaОценок пока нет
- Diesel and VGO RecoveryДокумент4 страницыDiesel and VGO RecoveryAlessio ScarabelliОценок пока нет
- Uniform Circular MotionДокумент23 страницыUniform Circular MotionAbdul Ahad SajjadОценок пока нет
- Ap A4Документ24 страницыAp A4فردوس سليمانОценок пока нет
- Bars and Beams Cheat SheetДокумент1 страницаBars and Beams Cheat SheetGhenal RiveraОценок пока нет
- J7 JFDR Simple Analytical ExpressionsДокумент16 страницJ7 JFDR Simple Analytical Expressionsmkilani77Оценок пока нет
- 2015 Ortega Amaya Aortega@Aimplas - Es TNT2015OrtegaAmayaДокумент10 страниц2015 Ortega Amaya Aortega@Aimplas - Es TNT2015OrtegaAmayaCHELVASERОценок пока нет
- Uniform Circular Motion 2023Документ12 страницUniform Circular Motion 2023Mariam ImranОценок пока нет
- Experiment No. - 5: Object: Apparatus: TheoryДокумент10 страницExperiment No. - 5: Object: Apparatus: TheoryROHIT SRIVASTAVОценок пока нет
- 0317 ForgingДокумент10 страниц0317 ForgingBurak KoyuncuogluОценок пока нет
- ShapesДокумент2 страницыShapesapi-360565590Оценок пока нет
- Grinding Force and Feed in Grinding The Spring End: Jingen Huang Fuqiang YingДокумент3 страницыGrinding Force and Feed in Grinding The Spring End: Jingen Huang Fuqiang YingJohn KОценок пока нет
- Paes 308 Straight Bevel Gears For Agricultural Machines Specifications and ApplicationsДокумент13 страницPaes 308 Straight Bevel Gears For Agricultural Machines Specifications and ApplicationsEdsel RaperОценок пока нет
- Introduction To Solids: A.C.Arun RajДокумент14 страницIntroduction To Solids: A.C.Arun RajArun Raj A CОценок пока нет
- Philippine Agricultural Engineering Standard Paes 308: 2001 Engineering Materials - Straight Bevel Gears For Agricultural Machines - Specifications and ApplicationsДокумент13 страницPhilippine Agricultural Engineering Standard Paes 308: 2001 Engineering Materials - Straight Bevel Gears For Agricultural Machines - Specifications and ApplicationsRachel AustriaОценок пока нет
- General: LightДокумент13 страницGeneral: LightSoham KejriwalОценок пока нет
- PRPQ 410 GK SeriesДокумент36 страницPRPQ 410 GK SeriesJaime Albarrán FaríasОценок пока нет
- Name: - : Trace The Solid ShapesДокумент4 страницыName: - : Trace The Solid ShapesHallie RichardsonОценок пока нет
- User Manual DraftДокумент5 страницUser Manual Draftjohn-john castañedaОценок пока нет
- Aerospace 10 00930Документ24 страницыAerospace 10 00930Ahmed Shaaban Soliman HamedОценок пока нет
- Comparison Clothoid Cubic PDFДокумент3 страницыComparison Clothoid Cubic PDFRininta ZamazunistiaОценок пока нет
- SPHERICAL PROJECTIONS (I) Lecture 08Документ5 страницSPHERICAL PROJECTIONS (I) Lecture 08argie2002Оценок пока нет
- Lammeren W P A.Wageningen B-Screw S.1969.TRANS PDFДокумент49 страницLammeren W P A.Wageningen B-Screw S.1969.TRANS PDFStefanoОценок пока нет
- Training On Geometrical Dimensioning & Tolerancing (GD&T) : Suresh MangawatiДокумент58 страницTraining On Geometrical Dimensioning & Tolerancing (GD&T) : Suresh Mangawatirakesh322Оценок пока нет
- Flat Fan Nozzles - Technology: Correct OverlappingДокумент24 страницыFlat Fan Nozzles - Technology: Correct OverlappingZen NazehaОценок пока нет
- Gedore 4597 enДокумент1 страницаGedore 4597 enrdzoetenОценок пока нет
- Low-Pressure Hoselines SN 544: Double Nipple Welding NippleДокумент2 страницыLow-Pressure Hoselines SN 544: Double Nipple Welding NippleNaveen Kumar Chauhan100% (1)
- Swirl Generation and Recirculation Using Radial Swirl VanesДокумент9 страницSwirl Generation and Recirculation Using Radial Swirl VanesVignesh PanneerselvamОценок пока нет
- Maths NotesДокумент9 страницMaths NotesAnweweОценок пока нет
- Vertical Alignment 2: CE 416 Lecture 8Документ8 страницVertical Alignment 2: CE 416 Lecture 8nasserОценок пока нет
- 5 1 Aero BasicsДокумент8 страниц5 1 Aero BasicsvictorienОценок пока нет
- Panel Bridge BrochureДокумент12 страницPanel Bridge BrochureAnita Christiani SianturiОценок пока нет
- INTERSECTION of SolidsДокумент13 страницINTERSECTION of SolidsK S ChalapathiОценок пока нет
- Rubber Hoses Steel Wire SpiralДокумент2 страницыRubber Hoses Steel Wire SpiralАндрей КулешовОценок пока нет
- Hexagon Socket Set Screws Flat Type Hexagon Bolts: (Technical Data) (Technical Data)Документ1 страницаHexagon Socket Set Screws Flat Type Hexagon Bolts: (Technical Data) (Technical Data)ilo iloОценок пока нет
- ECE522 2 GeneratorДокумент72 страницыECE522 2 Generatorirtiza.maksudОценок пока нет
- Font Awesome 4 7 0 Icons CheatsheetДокумент7 страницFont Awesome 4 7 0 Icons CheatsheetSafe LogisticsОценок пока нет
- Apex Seal Vibration Analysis of Limacon PDFДокумент9 страницApex Seal Vibration Analysis of Limacon PDFtakiya genjiОценок пока нет
- General Equations For Gear Cutting MachinesДокумент4 страницыGeneral Equations For Gear Cutting MachinesMukul JainОценок пока нет
- S1-2 Key Points: Part II: Measures, Shape and Space StrandДокумент44 страницыS1-2 Key Points: Part II: Measures, Shape and Space StrandCharlotteОценок пока нет
- GearsДокумент22 страницыGearsVeerendraОценок пока нет
- Projections of Solids: S. P. Harsha, PHDДокумент43 страницыProjections of Solids: S. P. Harsha, PHDkamal sharmaОценок пока нет
- Involute Spline Shafts & Bushings: FeaturesДокумент4 страницыInvolute Spline Shafts & Bushings: FeaturesSunilОценок пока нет
- Re-Evaluation of The Condylar Path As The Reference For Occlus J - GN - 1995 - Vol - 14 - pp31-40 - Hobo - S - Takayama - H PDFДокумент10 страницRe-Evaluation of The Condylar Path As The Reference For Occlus J - GN - 1995 - Vol - 14 - pp31-40 - Hobo - S - Takayama - H PDFCostanza MicarelliОценок пока нет
- Gambar Bentangan enДокумент13 страницGambar Bentangan enAndrea Mega PutraОценок пока нет
- CAMS s3Документ58 страницCAMS s3NirshadОценок пока нет
- 04 - Projection of SolidДокумент43 страницы04 - Projection of SolidVinay SinghОценок пока нет
- Valtek FlowpakДокумент12 страницValtek FlowpakRaphael AndradeОценок пока нет
- Elips AnimasiДокумент4 страницыElips Animasisri.ukm08100% (2)
- Four Bar Linkages: 1. Types of Linkages 2. Synthesis (Design)Документ16 страницFour Bar Linkages: 1. Types of Linkages 2. Synthesis (Design)Rodel AlmohallasОценок пока нет
- Cam and FollowerДокумент23 страницыCam and FollowerR Hari Hara SОценок пока нет
- Purpose of Drawing These Curves:-: Which Remains Common To Both SolidsДокумент13 страницPurpose of Drawing These Curves:-: Which Remains Common To Both SolidsChand RajОценок пока нет
- Purpose of Drawing These Curves:-: Which Remains Common To Both SolidsДокумент13 страницPurpose of Drawing These Curves:-: Which Remains Common To Both SolidsMani Charan ManicharanОценок пока нет
- Key Dimensions of Circles: Circumference of Outside of TyreДокумент8 страницKey Dimensions of Circles: Circumference of Outside of TyreibouОценок пока нет
- Diseño de Escalera HelicoidalДокумент7 страницDiseño de Escalera HelicoidalPedro Luis Choque MamaniОценок пока нет
- TOM Cam & FollowerДокумент19 страницTOM Cam & FollowerRAHUL SOLANKEОценок пока нет
- Titan - Soft Soil StabilizationДокумент6 страницTitan - Soft Soil StabilizationCarlos MakheleОценок пока нет
- Cylindrical Compression Helix Springs For Suspension SystemsОт EverandCylindrical Compression Helix Springs For Suspension SystemsОценок пока нет
- Crude Unit Startup Consequences of High Liquid LevelДокумент4 страницыCrude Unit Startup Consequences of High Liquid LevelAlessio ScarabelliОценок пока нет
- Fluid Dynamics (N.2) : A. Vania, Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyДокумент12 страницFluid Dynamics (N.2) : A. Vania, Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliОценок пока нет
- Approaching The RevampДокумент6 страницApproaching The RevampAlessio ScarabelliОценок пока нет
- Correct FCC Tower RevampДокумент8 страницCorrect FCC Tower RevampAlessio ScarabelliОценок пока нет
- Fast Tracking An FCC RevampДокумент8 страницFast Tracking An FCC RevampAlessio ScarabelliОценок пока нет
- Efficiency Coefficient of Mechanical TransmissionsДокумент4 страницыEfficiency Coefficient of Mechanical TransmissionsAlessio ScarabelliОценок пока нет
- Maximizing Gas Plant CapacityДокумент6 страницMaximizing Gas Plant CapacityAlessio ScarabelliОценок пока нет
- Lessons From Three Mile Island Visual Design in A High Stakes EnvironmentДокумент28 страницLessons From Three Mile Island Visual Design in A High Stakes EnvironmentAlessio ScarabelliОценок пока нет
- ICE PPT v1Документ16 страницICE PPT v1Alessio ScarabelliОценок пока нет
- Mech Transmissions v1Документ12 страницMech Transmissions v1Alessio ScarabelliОценок пока нет
- Dynamic Analysis of A Point MassДокумент7 страницDynamic Analysis of A Point MassAlessio ScarabelliОценок пока нет
- Kinematics v1Документ23 страницыKinematics v1Alessio ScarabelliОценок пока нет
- Mech Transmission v2Документ21 страницаMech Transmission v2Alessio ScarabelliОценок пока нет
- Transmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyДокумент8 страницTransmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliОценок пока нет
- Dynamics of A Rigid Body: DM D D DM DFДокумент3 страницыDynamics of A Rigid Body: DM D D DM DFAlessio ScarabelliОценок пока нет
- Induction Motors PPT v1Документ10 страницInduction Motors PPT v1Alessio ScarabelliОценок пока нет
- Articolo PDFДокумент8 страницArticolo PDFAlessio ScarabelliОценок пока нет
- ICE - Internal Combustion EngineДокумент12 страницICE - Internal Combustion EngineAlessio ScarabelliОценок пока нет
- Pneumatic Instrumentation AllДокумент29 страницPneumatic Instrumentation AllAlessio ScarabelliОценок пока нет
- Fogler Examples IsothermalДокумент36 страницFogler Examples IsothermalAlessio ScarabelliОценок пока нет
- Thermocouple 2Документ22 страницыThermocouple 2Alessio Scarabelli100% (1)
- First Principles Design Procedure V1.1 240706Документ6 страницFirst Principles Design Procedure V1.1 240706NBV2381Оценок пока нет
- Seismic Evaluation of RC Structure Buildings Push Over ANSYSДокумент71 страницаSeismic Evaluation of RC Structure Buildings Push Over ANSYSAref Abadel100% (2)
- Projectile PacketДокумент17 страницProjectile PacketRusherОценок пока нет
- Syllabus Vehicle DynamicsДокумент1 страницаSyllabus Vehicle DynamicsGirish ChandranОценок пока нет
- Interfacial WavesДокумент1 страницаInterfacial WavesPradeep KumarОценок пока нет
- Dynamics of Machines - Part III - IFS PDFДокумент96 страницDynamics of Machines - Part III - IFS PDFAnonymous OFwyjaMyОценок пока нет
- Main Tunnel Lining AnalysisДокумент27 страницMain Tunnel Lining AnalysisjoshuaОценок пока нет
- Atrito SKFДокумент20 страницAtrito SKFMarcos TakahamaОценок пока нет
- G.R. Engineering Pvt. LTD.: Hydrotest Pressure Test Stress CalculationДокумент2 страницыG.R. Engineering Pvt. LTD.: Hydrotest Pressure Test Stress CalculationTushar Mangrati100% (2)
- Arduino ViscositasДокумент2 страницыArduino ViscositasWiwit Sumarni100% (1)
- Politecnico Di Torino: Master's Degree in Civil EngineeringДокумент72 страницыPolitecnico Di Torino: Master's Degree in Civil Engineeringyong yangОценок пока нет
- Laminate Modeller WorkbookДокумент45 страницLaminate Modeller WorkbookLan T NguyenОценок пока нет
- Connection - IDEA StatiCa PDFДокумент18 страницConnection - IDEA StatiCa PDFDaniel TuerosОценок пока нет
- 2021 Physics Specimen Paper PDFДокумент58 страниц2021 Physics Specimen Paper PDFAniket PalОценок пока нет
- Thrust On Inclined SurfacesДокумент17 страницThrust On Inclined Surfacesjohns ndegeОценок пока нет
- Aceleración de CoriolisДокумент17 страницAceleración de CoriolisDavidBecerraОценок пока нет
- T650 - Engineering Science N4 April QP 2021Документ10 страницT650 - Engineering Science N4 April QP 2021Logan JesseОценок пока нет
- Chapter2.3curvilinearmotion-Class DynamicДокумент20 страницChapter2.3curvilinearmotion-Class Dynamicshakirr aimannОценок пока нет
- Design of Hydrodynamic BearingДокумент9 страницDesign of Hydrodynamic Bearingjason patelОценок пока нет
- Renewable Energy: Hüseyin BenliДокумент10 страницRenewable Energy: Hüseyin BenliMathes WaranОценок пока нет
- Offshore Structures Under Earthquake Loads: 22.1 GeneralДокумент12 страницOffshore Structures Under Earthquake Loads: 22.1 GeneralIrfan KhanОценок пока нет
- Machining in Bearing CasingДокумент10 страницMachining in Bearing CasingsonotiumОценок пока нет