Вам также может понравиться
- Gestion OrganizadoresДокумент4 страницыGestion OrganizadoresAlexander VelezОценок пока нет
- NuclearДокумент5 страницNuclearAlexander VelezОценок пока нет
- Factor de PotenciaДокумент13 страницFactor de PotenciaAlexander VelezОценок пока нет
- Principos Basico CHДокумент11 страницPrincipos Basico CHAlexander VelezОценок пока нет
- PDFДокумент5 страницPDFAlexander VelezОценок пока нет
- MP CalidadДокумент23 страницыMP CalidadAlexander VelezОценок пока нет
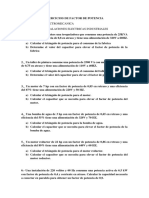
- Ejercicios de Factor de PotenciaДокумент3 страницыEjercicios de Factor de PotenciaAlexander VelezОценок пока нет
- Informe Protecciones MototresДокумент12 страницInforme Protecciones MototresAlexander VelezОценок пока нет
- Análisis de normas ISO para gestión de calidad, medio ambiente, energía, riesgos y responsabilidad socialДокумент6 страницAnálisis de normas ISO para gestión de calidad, medio ambiente, energía, riesgos y responsabilidad socialAlexander VelezОценок пока нет
- InformeДокумент8 страницInformeIvonne MarcelaОценок пока нет
- Tablero ElectriricoДокумент8 страницTablero ElectriricoAlexander VelezОценок пока нет
- InformeДокумент8 страницInformeIvonne MarcelaОценок пока нет
- InformeДокумент8 страницInformeIvonne MarcelaОценок пока нет
- Sistem AsДокумент4 страницыSistem AsAfsc AlvaroОценок пока нет
- InformeДокумент8 страницInformeIvonne MarcelaОценок пока нет
- Conversion de SeñalesДокумент6 страницConversion de SeñalesAlexander Velez0% (1)
- Mantenimiento PDFДокумент5 страницMantenimiento PDFAfsc AlvaroОценок пока нет
- PDFДокумент5 страницPDFAlexander VelezОценок пока нет
- S7 - 1500Документ7 страницS7 - 1500Alexander VelezОценок пока нет
- Diapositiva 2Документ6 страницDiapositiva 2Alexander VelezОценок пока нет
- Informe de La Practica Del Receptor LiquidoДокумент6 страницInforme de La Practica Del Receptor LiquidoAlexander VelezОценок пока нет
- RefriegracionДокумент2 страницыRefriegracionAlexander VelezОценок пока нет
- Acumulador de SuccionДокумент12 страницAcumulador de SuccionAlexander VelezОценок пока нет
- Cuestionario Unidad IiДокумент3 страницыCuestionario Unidad IiAlexander VelezОценок пока нет
- Informe Carga de RefrigeranteДокумент10 страницInforme Carga de RefrigeranteAlexander Velez100% (1)
- Que Es Un EmprendedorДокумент6 страницQue Es Un EmprendedorAlexander VelezОценок пока нет
- Lab ViewДокумент11 страницLab ViewAlexander VelezОценок пока нет
- Tipos de Trabajo en EquipoДокумент6 страницTipos de Trabajo en EquipoAlexander VelezОценок пока нет
- Ejer Cici OsДокумент2 страницыEjer Cici OsAlexander VelezОценок пока нет
- Motor EléctricoДокумент3 страницыMotor EléctricoAlexander VelezОценок пока нет
- Triggers en Transact SQLДокумент5 страницTriggers en Transact SQLpccroar5848Оценок пока нет
- Motorola Moto G7 Power Azul Marino 64GB - Catálogo Entel - Pe - Entel AAAAA PDFДокумент3 страницыMotorola Moto G7 Power Azul Marino 64GB - Catálogo Entel - Pe - Entel AAAAA PDFMarck Mamani FloresОценок пока нет
- Crear Calendario Con PublisherДокумент7 страницCrear Calendario Con PublishereuitiobelenОценок пока нет
- Plan de Trabajo Estudiante (Quimica) Ucv MJДокумент4 страницыPlan de Trabajo Estudiante (Quimica) Ucv MJRonny PortilloОценок пока нет
- Guia #3 CONVOLUCION PDFДокумент2 страницыGuia #3 CONVOLUCION PDFDaniel FLAОценок пока нет
- Dca MetodosДокумент41 страницаDca MetodosJanela MostaceroОценок пока нет
- Camaras oДокумент2 страницыCamaras ozoltakОценок пока нет
- Tics en BodegasДокумент92 страницыTics en BodegasJUAN ANTONIOОценок пока нет
- Software Computacional y Su ClasificaciónДокумент8 страницSoftware Computacional y Su ClasificaciónYansy GonzalezОценок пока нет
- AIO's Technician GUIДокумент10 страницAIO's Technician GUIRonald Huacasi CcopaОценок пока нет
- Diploma Do Catastro I IДокумент7 страницDiploma Do Catastro I IRusbel RiosОценок пока нет
- Lucero RivasДокумент4 страницыLucero RivaszalathielОценок пока нет
- Polinomios de Taylor para Funciones de 2 VariablesДокумент4 страницыPolinomios de Taylor para Funciones de 2 VariablesLucy HasADreamОценок пока нет
- PD1 VelardeДокумент7 страницPD1 VelardeSebastiam VelardeОценок пока нет
- Curso Manejo Pizarro InteractivoДокумент29 страницCurso Manejo Pizarro InteractivorfernandОценок пока нет
- Instructivo de Petroleo para Trabajo Especial de Grado UnellezДокумент62 страницыInstructivo de Petroleo para Trabajo Especial de Grado UnellezDayana JaimesОценок пока нет
- Manuales AdministrativosДокумент18 страницManuales AdministrativosbaldeОценок пока нет
- Métodos abreviados de teclado de Word para WindowsДокумент3 страницыMétodos abreviados de teclado de Word para WindowsExtrovertido Sin LimitesОценок пока нет
- Mapa Conceptual Proceso de Control Interno y Sus ComponentesДокумент1 страницаMapa Conceptual Proceso de Control Interno y Sus Componentesfabiola burgos50% (2)
- Mapa MentalДокумент6 страницMapa MentalDavincin 3Оценок пока нет
- Squid LinuxДокумент11 страницSquid LinuxharvicalleОценок пока нет
- Taller Cap 6 CiscoДокумент2 страницыTaller Cap 6 CiscoAna BuenoОценок пока нет
- Manual Instruction For Remote ControllerДокумент5 страницManual Instruction For Remote ControlleriusperezОценок пока нет
- Ejercicio FutbolДокумент2 страницыEjercicio FutbolErwin GMОценок пока нет
- Práctica BIBLIOTECAДокумент17 страницPráctica BIBLIOTECAJean Paul PereaОценок пока нет
- Manual GenieДокумент146 страницManual GenieTom TraviОценок пока нет
- Trabajo de Investigacion Ingenieria de Software II - ModificadoДокумент7 страницTrabajo de Investigacion Ingenieria de Software II - ModificadoGuillermo E Martinez ClОценок пока нет
- Precursores de La InformáticaДокумент52 страницыPrecursores de La InformáticaIEduardo Sanchez75% (4)
- Analisis de Varianza de Un FactorДокумент24 страницыAnalisis de Varianza de Un FactorJairo Concepción Rodriguez100% (1)
- Informe Mensual Zona 3 MIES LatacungaДокумент3 страницыInforme Mensual Zona 3 MIES LatacungaalexisltgaОценок пока нет