Вам также может понравиться
- Introduction To Electric Vehicle Battery Systems - Technical ArticlesДокумент5 страницIntroduction To Electric Vehicle Battery Systems - Technical ArticlesMoorthy subramanianОценок пока нет
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968От EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968Оценок пока нет
- E Vehicle: Battery Management System: A Project Progress Report OnДокумент10 страницE Vehicle: Battery Management System: A Project Progress Report OnOmkar J SuvarnaОценок пока нет
- Miracle Auto Battery: A Deep-Cycle Battery for the Twenty-First CenturyОт EverandMiracle Auto Battery: A Deep-Cycle Battery for the Twenty-First CenturyРейтинг: 5 из 5 звезд5/5 (1)
- Ashwoods Battery Management SystemДокумент6 страницAshwoods Battery Management SystemChittaranjan BaralОценок пока нет
- Impedance Battery TesterДокумент4 страницыImpedance Battery TesterLuis F OrtegaОценок пока нет
- Analysis of Cooling in A Battery Pack (Ansys)Документ18 страницAnalysis of Cooling in A Battery Pack (Ansys)tamaraОценок пока нет
- Toshiba Rechargeable Battery: Industrial Lithium-Ion BatteryДокумент5 страницToshiba Rechargeable Battery: Industrial Lithium-Ion BatterydeskinielОценок пока нет
- Battery1 BatteryDesignStudio RSДокумент29 страницBattery1 BatteryDesignStudio RSdoowhОценок пока нет
- Fiber Optic Temperature Sensor For EV Battery TestingДокумент10 страницFiber Optic Temperature Sensor For EV Battery TestingRugged MonitoringОценок пока нет
- Gui Lithium Battery Banks ConnectionsДокумент18 страницGui Lithium Battery Banks Connectionsingo ingoОценок пока нет
- BMS For Li-IonДокумент26 страницBMS For Li-IonramukolakiОценок пока нет
- Fact Sheet - 48V Lithium-Ion Battery - en - Rev02Документ2 страницыFact Sheet - 48V Lithium-Ion Battery - en - Rev02Thiep VuОценок пока нет
- A Refuelable Zinc/Air Battery for Fleet Electric VehiclesДокумент14 страницA Refuelable Zinc/Air Battery for Fleet Electric VehiclesAnonymous Kti5jq5EJIОценок пока нет
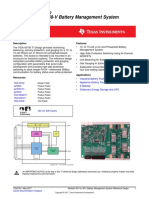
- Multicell 36V To 48V Battery Management System Reference DesignДокумент37 страницMulticell 36V To 48V Battery Management System Reference DesignkarkeraОценок пока нет
- Power of BatteriesДокумент13 страницPower of BatteriesancientasmОценок пока нет
- EV Design & Modelling PDFДокумент25 страницEV Design & Modelling PDFJhangir DesfrandantaОценок пока нет
- Bipolar BatteryДокумент25 страницBipolar BatteryP G Balakrishnan100% (1)
- Serial and Parallel Battery ConfigurationsДокумент5 страницSerial and Parallel Battery ConfigurationsEleazar SyОценок пока нет
- Vehicle ElectrificationДокумент30 страницVehicle ElectrificationSteve B. SalongaОценок пока нет
- 2017 International Battery Seminar BrochureДокумент31 страница2017 International Battery Seminar BrochureFred Lamert100% (3)
- Modeling of IGBT-based Power Electronics Systems For Hybrid and Electric Vehicles - EDNДокумент10 страницModeling of IGBT-based Power Electronics Systems For Hybrid and Electric Vehicles - EDNgegiturОценок пока нет
- Hydraulic Regenerative Braking System PDFДокумент12 страницHydraulic Regenerative Braking System PDFhai dangОценок пока нет
- Battery Management SystemДокумент8 страницBattery Management System2207VISMAYA MULAYОценок пока нет
- Li-Ion CellДокумент17 страницLi-Ion CellDavid CondoviciОценок пока нет
- EV Battery PacksДокумент3 страницыEV Battery PacksVKSОценок пока нет
- Automating Battery Pack Design AA V9 I2Документ4 страницыAutomating Battery Pack Design AA V9 I2Anonymous hWj4HKIDOFОценок пока нет
- Tesla Battery Module Controller Guide for Home Solar InstallationsДокумент56 страницTesla Battery Module Controller Guide for Home Solar InstallationsYora Erlangga100% (1)
- AIN17 - Passive Balancing Battery Management System Using MOSFETs As Balancing Resistor - F.bunДокумент5 страницAIN17 - Passive Balancing Battery Management System Using MOSFETs As Balancing Resistor - F.bunCostache CatalinОценок пока нет
- Final Report 98086986Документ54 страницыFinal Report 98086986Anton GouwsОценок пока нет
- Cell Product Specification: Microvast Power Systems Co.,LtdДокумент3 страницыCell Product Specification: Microvast Power Systems Co.,LtdAngelo DenidisОценок пока нет
- Thermal Runaway Challenges in Next Generation Battery Pack DesignsДокумент26 страницThermal Runaway Challenges in Next Generation Battery Pack DesignsAndré CoutinhoОценок пока нет
- Large Format Lithium Ion Pouch Cell Full Thermal Characterisation For Improved Electric Vehicle Thermal ManagementДокумент11 страницLarge Format Lithium Ion Pouch Cell Full Thermal Characterisation For Improved Electric Vehicle Thermal ManagementChandrasekaran N100% (1)
- HEV EV ArchitectureДокумент48 страницHEV EV ArchitectureConstantin Teodor ArdeiuОценок пока нет
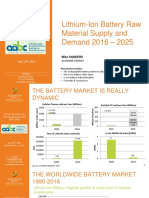
- Lithium-Ion Battery Raw Material Supply and Demand 2016-2025 C. Pillot - M. Sanders Presentation at AABC-US San Francisco June 2017Документ40 страницLithium-Ion Battery Raw Material Supply and Demand 2016-2025 C. Pillot - M. Sanders Presentation at AABC-US San Francisco June 2017Estevão GomesОценок пока нет
- What A Teardown of The Latest Electric Vehicles Reveals About The Future of Mass Market EVs PDFДокумент11 страницWhat A Teardown of The Latest Electric Vehicles Reveals About The Future of Mass Market EVs PDFSupriya ShahОценок пока нет
- KUKA KR 360-3 (Six-Axis Industrial Robot For Wheel Assembly System)Документ21 страницаKUKA KR 360-3 (Six-Axis Industrial Robot For Wheel Assembly System)thanh_cdt01Оценок пока нет
- MIT Students Explore Lithium-Ion Battery TechnologyДокумент13 страницMIT Students Explore Lithium-Ion Battery TechnologyAjani SavariauОценок пока нет
- Hybrid Electric Vehicles ControlДокумент151 страницаHybrid Electric Vehicles ControlHuynh Thanh AnhОценок пока нет
- Batteries PresentationДокумент24 страницыBatteries PresentationGajendraPatelОценок пока нет
- Manual Wire Bond Pull Tester - Micropull V - MP5Документ4 страницыManual Wire Bond Pull Tester - Micropull V - MP5Alberto Moreno GarrigaОценок пока нет
- Battery Management Systems For Electric VehiclesДокумент23 страницыBattery Management Systems For Electric VehiclesMohammad Tufail Safdar100% (5)
- Cell Balancing TheoryДокумент28 страницCell Balancing TheoryChan HjОценок пока нет
- 11 - 27 Battery-Management System (BMS) and SOCДокумент13 страниц11 - 27 Battery-Management System (BMS) and SOCNatarajan Nagarajan100% (1)
- SUPERCAPACITORS: A NEW HIGH-POWER ENERGY STORAGE DEVICEДокумент4 страницыSUPERCAPACITORS: A NEW HIGH-POWER ENERGY STORAGE DEVICENitin Kathuria100% (1)
- Battery For Hybrid and Electric Vehicle EngineeringДокумент34 страницыBattery For Hybrid and Electric Vehicle EngineeringNakul S PatelОценок пока нет
- A Guide To LiPo BatteriesДокумент10 страницA Guide To LiPo BatteriesTonyBonjorniОценок пока нет
- Public Report 9 Lithium-Ion Battery Testing: September 2020Документ38 страницPublic Report 9 Lithium-Ion Battery Testing: September 2020Diego Monroy OrtizОценок пока нет
- Battery Management SystemДокумент4 страницыBattery Management Systemkoushik94Оценок пока нет
- APC UXBP48 Battery Pack PDFДокумент4 страницыAPC UXBP48 Battery Pack PDFagsallesОценок пока нет
- Lithium Ion BatteryДокумент26 страницLithium Ion BatteryPhạm Văn TưởngОценок пока нет
- A New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemДокумент5 страницA New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemSanjana RoseОценок пока нет
- Unit 1.1 - EV IntroДокумент68 страницUnit 1.1 - EV IntroPilar Martinez Gonzalez100% (1)
- P410545 en 192S1P 8 Lto Smart Battery HDДокумент2 страницыP410545 en 192S1P 8 Lto Smart Battery HDQiang LiuОценок пока нет
- Powerwall 2 DatasheetДокумент2 страницыPowerwall 2 DatasheetJan Vermeulen100% (1)
- Advantages of ElectromobilityДокумент3 страницыAdvantages of ElectromobilityMuhammad LuthfiОценок пока нет
- Feb 17 2021 Battery Safety Webinar UL Palani Balaya NUSДокумент49 страницFeb 17 2021 Battery Safety Webinar UL Palani Balaya NUSvenugopalanОценок пока нет
- Wireless Charging SystemДокумент25 страницWireless Charging SystemWENZE LYUОценок пока нет
- Allowing You and Your Car To Go That .: Extra MileДокумент3 страницыAllowing You and Your Car To Go That .: Extra Milesp_escherОценок пока нет
- Applsci 09 02666 PDFДокумент14 страницApplsci 09 02666 PDFpurnimaОценок пока нет
- New Liebherr PDFДокумент28 страницNew Liebherr PDFpurnimaОценок пока нет
- Liebherr Engine Service ManualДокумент2 страницыLiebherr Engine Service Manualpurnima25% (4)
- MaritimeReporter1980 10 01Документ70 страницMaritimeReporter1980 10 01purnimaОценок пока нет
- 110 Tonnes Liebherr LR1110Документ32 страницы110 Tonnes Liebherr LR1110purnimaОценок пока нет
- HQP 70273 DAF PACCAR PX 5 Engines PDFДокумент4 страницыHQP 70273 DAF PACCAR PX 5 Engines PDFpurnimaОценок пока нет
- DAF XF Brochure MY2020 HQ GB PDFДокумент15 страницDAF XF Brochure MY2020 HQ GB PDFpurnimaОценок пока нет
- Engine Liebherr D934S PDFДокумент6 страницEngine Liebherr D934S PDFpurnimaОценок пока нет
- Daf D0032 GB 18 03 Daf in 2019 PDFДокумент11 страницDaf D0032 GB 18 03 Daf in 2019 PDFpurnimaОценок пока нет
- Troubleshooting Just Got Better With Clearsky: Remote Analyzer ReaderДокумент2 страницыTroubleshooting Just Got Better With Clearsky: Remote Analyzer ReaderpurnimaОценок пока нет
- Ku 125490 272610 913792 PDFДокумент2 страницыKu 125490 272610 913792 PDFpurnimaОценок пока нет
- Daf Acc HQ en PDFДокумент2 страницыDaf Acc HQ en PDFpurnimaОценок пока нет
- L6 L8 Spec Sheet PDFДокумент4 страницыL6 L8 Spec Sheet PDFpurnimaОценок пока нет
- Engine Liebherr D934S PDFДокумент6 страницEngine Liebherr D934S PDFpurnimaОценок пока нет
- Troubleshooting Just Got Better With Clearsky: Remote Analyzer ReaderДокумент2 страницыTroubleshooting Just Got Better With Clearsky: Remote Analyzer ReaderpurnimaОценок пока нет
- 2019 ClearSky Telematics Brochure PDFДокумент8 страниц2019 ClearSky Telematics Brochure PDFpurnimaОценок пока нет
- Applsci 09 02666 PDFДокумент14 страницApplsci 09 02666 PDFpurnimaОценок пока нет
- Emission Manuals - Peterbilt Exhaust Regeneration Quick Reference GuideДокумент2 страницыEmission Manuals - Peterbilt Exhaust Regeneration Quick Reference GuidepurnimaОценок пока нет
- L6 L8 Spec Sheet PDFДокумент4 страницыL6 L8 Spec Sheet PDFpurnimaОценок пока нет
- 2012.10 Challenges in Vessel Speed OptimizationДокумент32 страницы2012.10 Challenges in Vessel Speed Optimizationgnd100Оценок пока нет
- 2019 ClearSky Telematics Brochure PDFДокумент8 страниц2019 ClearSky Telematics Brochure PDFpurnimaОценок пока нет
- Ku 125490 272610 913792 PDFДокумент2 страницыKu 125490 272610 913792 PDFpurnimaОценок пока нет
- 2018 Annual Report e PDFДокумент136 страниц2018 Annual Report e PDFpurnimaОценок пока нет
- Vecu 5.11 Programming Guide 2018Документ190 страницVecu 5.11 Programming Guide 2018harianaОценок пока нет
- Vecu 5.11 Programming Guide 2018Документ190 страницVecu 5.11 Programming Guide 2018harianaОценок пока нет
- Epiq Quick Reference GuideДокумент2 страницыEpiq Quick Reference GuidepurnimaОценок пока нет
- Ship Traffic Control: SolutionsДокумент11 страницShip Traffic Control: SolutionspurnimaОценок пока нет
- Model 579ev Sales SheetДокумент2 страницыModel 579ev Sales SheetpurnimaОценок пока нет
- 579 Brochure 2019Документ28 страниц579 Brochure 2019purnimaОценок пока нет
- Choose the Best WordДокумент7 страницChoose the Best WordJohnny JohnnieeОценок пока нет
- Interna Medicine RheumatologyДокумент15 страницInterna Medicine RheumatologyHidayah13Оценок пока нет
- SQL 1: Basic Statements: Yufei TaoДокумент24 страницыSQL 1: Basic Statements: Yufei TaoHui Ka HoОценок пока нет
- Ne 01 20 09 2018Документ436 страницNe 01 20 09 2018VaradrajОценок пока нет
- 277Документ18 страниц277Rosy Andrea NicolasОценок пока нет
- Legal Research MethodsДокумент10 страницLegal Research MethodsCol Amit KumarОценок пока нет
- Merchandise Floor Ready Standards - Supplier InformationДокумент46 страницMerchandise Floor Ready Standards - Supplier InformationGarmentLearner100% (1)
- Color Codes and Irregular Marking-SampleДокумент23 страницыColor Codes and Irregular Marking-Samplemahrez laabidiОценок пока нет
- Aircraft ChecksДокумент10 страницAircraft ChecksAshirbad RathaОценок пока нет
- SOP for Troubleshooting LT ACB IssuesДокумент9 страницSOP for Troubleshooting LT ACB IssuesAkhilesh Kumar SinghОценок пока нет
- Raychem Price ListДокумент48 страницRaychem Price ListramshivvermaОценок пока нет
- Lab ReportДокумент5 страницLab ReportHugsОценок пока нет
- Chemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechДокумент14 страницChemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechKrispin FongОценок пока нет
- Castel - From Dangerousness To RiskДокумент10 страницCastel - From Dangerousness To Riskregmatar100% (2)
- Assessing Eyes NCM 103 ChecklistДокумент7 страницAssessing Eyes NCM 103 ChecklistNicole NipasОценок пока нет
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherДокумент23 страницыEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherMirza Azhar HaseebОценок пока нет
- Obat LasaДокумент3 страницыObat Lasaibnunanda29Оценок пока нет
- Mythic Magazine 017Документ43 страницыMythic Magazine 017William Warren100% (1)
- Jesus - The Creator Unleashes Our Creative PotentialДокумент1 страницаJesus - The Creator Unleashes Our Creative PotentialKear Kyii WongОценок пока нет
- Caribbean Examinations Council Caribbean Secondary Certificate of Education Guidelines For On-Site Moderation SciencesДокумент9 страницCaribbean Examinations Council Caribbean Secondary Certificate of Education Guidelines For On-Site Moderation SciencesjokerОценок пока нет
- Believer - Imagine Dragons - CIFRA CLUBДокумент9 страницBeliever - Imagine Dragons - CIFRA CLUBSilvio Augusto Comercial 01Оценок пока нет
- Maximizing modular learning opportunities through innovation and collaborationДокумент2 страницыMaximizing modular learning opportunities through innovation and collaborationNIMFA SEPARAОценок пока нет
- Executive Education Portfolio Soft Copy-INSEADДокумент58 страницExecutive Education Portfolio Soft Copy-INSEADОля КусраеваОценок пока нет
- 01 Design of Flexible Pavement Using Coir GeotextilesДокумент126 страниц01 Design of Flexible Pavement Using Coir GeotextilesSreeja Sadanandan100% (1)
- OROLO & W. D. GannДокумент56 страницOROLO & W. D. GannGaurav Garg100% (1)
- FINAL - Plastic Small Grants NOFO DocumentДокумент23 страницыFINAL - Plastic Small Grants NOFO DocumentCarlos Del CastilloОценок пока нет
- Guidelines 2.0Документ4 страницыGuidelines 2.0Hansel TayongОценок пока нет
- Brooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFДокумент36 страницBrooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFlois.guzman538100% (12)
- Lesson 5 CMAДокумент10 страницLesson 5 CMAAssma SabriОценок пока нет
- The Fabric of Civilization: How Textiles Made the WorldОт EverandThe Fabric of Civilization: How Textiles Made the WorldРейтинг: 4.5 из 5 звезд4.5/5 (57)
- Hero Found: The Greatest POW Escape of the Vietnam WarОт EverandHero Found: The Greatest POW Escape of the Vietnam WarРейтинг: 4 из 5 звезд4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonОт EverandSully: The Untold Story Behind the Miracle on the HudsonРейтинг: 4 из 5 звезд4/5 (103)
- The End of Craving: Recovering the Lost Wisdom of Eating WellОт EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellРейтинг: 4.5 из 5 звезд4.5/5 (80)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОт EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОценок пока нет
- The Weather Machine: A Journey Inside the ForecastОт EverandThe Weather Machine: A Journey Inside the ForecastРейтинг: 3.5 из 5 звезд3.5/5 (31)
- A Place of My Own: The Architecture of DaydreamsОт EverandA Place of My Own: The Architecture of DaydreamsРейтинг: 4 из 5 звезд4/5 (241)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestОт EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestРейтинг: 4 из 5 звезд4/5 (28)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980От Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Рейтинг: 4 из 5 звезд4/5 (21)
- Pale Blue Dot: A Vision of the Human Future in SpaceОт EverandPale Blue Dot: A Vision of the Human Future in SpaceРейтинг: 4.5 из 5 звезд4.5/5 (586)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureОт EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureРейтинг: 5 из 5 звезд5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidОт EverandPacking for Mars: The Curious Science of Life in the VoidРейтинг: 4 из 5 звезд4/5 (1395)
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Reality+: Virtual Worlds and the Problems of PhilosophyОт EverandReality+: Virtual Worlds and the Problems of PhilosophyРейтинг: 4 из 5 звезд4/5 (24)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseОт EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (50)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseОт EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseРейтинг: 3.5 из 5 звезд3.5/5 (12)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationОт EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationРейтинг: 4.5 из 5 звезд4.5/5 (46)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsОт EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsОценок пока нет
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesОт EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesОценок пока нет
- Fallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldОт EverandFallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldРейтинг: 4.5 из 5 звезд4.5/5 (82)
- Invention and Innovation: A Brief History of Hype and FailureОт EverandInvention and Innovation: A Brief History of Hype and FailureРейтинг: 4.5 из 5 звезд4.5/5 (4)