Вам также может понравиться
- AlcanceДокумент7 страницAlcancemanuelОценок пока нет
- Titulo Del Proyecto de Investigación 3.0Документ7 страницTitulo Del Proyecto de Investigación 3.0manuelОценок пока нет
- Que Es Una Corriente MonofasicaДокумент2 страницыQue Es Una Corriente MonofasicamanuelОценок пока нет
- Info Numero 1Документ33 страницыInfo Numero 1manuelОценок пока нет
- Trabajo de Maquinas Electricas (Formato Apa)Документ27 страницTrabajo de Maquinas Electricas (Formato Apa)manuelОценок пока нет
- Informe Numero 5Документ21 страницаInforme Numero 5manuelОценок пока нет
- Qué Máquina Acciona Al Generador EléctricoДокумент1 страницаQué Máquina Acciona Al Generador EléctricomanuelОценок пока нет
- Lab MultimetroДокумент10 страницLab MultimetromanuelОценок пока нет
- Conductores Eléctricos (Mapa Mental)Документ1 страницаConductores Eléctricos (Mapa Mental)manuel100% (5)
- Importancia de Un Puesto A TierraДокумент3 страницыImportancia de Un Puesto A TierramanuelОценок пока нет
- Medida de La Potencia Activa MonofasicaДокумент5 страницMedida de La Potencia Activa MonofasicamanuelОценок пока нет
- La ComputadoraДокумент3 страницыLa Computadoramanuel100% (1)
- Elementos y TelurometroДокумент11 страницElementos y TelurometromanuelОценок пока нет
- Ley de BetzДокумент2 страницыLey de BetzmanuelОценок пока нет
- Teoria de La Capa LimiteДокумент5 страницTeoria de La Capa LimitemanuelОценок пока нет
- Instrumentos Electricos PDFДокумент27 страницInstrumentos Electricos PDFCesar AugustoОценок пока нет
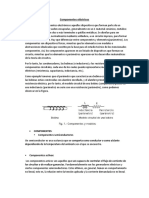
- Componentes EléctricosДокумент11 страницComponentes EléctricosmanuelОценок пока нет
- Sistema de CargaДокумент18 страницSistema de CargamanuelОценок пока нет
- Que Es Una Corriente MonofasicaДокумент2 страницыQue Es Una Corriente MonofasicamanuelОценок пока нет
- Teorema de Thevenin y NortonДокумент19 страницTeorema de Thevenin y NortonmanuelОценок пока нет
- Resolucion de Circuitos Aplicando Transformada de LaplaceДокумент3 страницыResolucion de Circuitos Aplicando Transformada de LaplacemanuelОценок пока нет
- Resolucion de Circuitos Aplicando Transformada de LaplaceДокумент3 страницыResolucion de Circuitos Aplicando Transformada de LaplacemanuelОценок пока нет
- Teorema de Thevenin y NortonДокумент19 страницTeorema de Thevenin y NortonmanuelОценок пока нет
- Conexión Delta-EstrellaДокумент11 страницConexión Delta-EstrellaNey Smith Mijahuanca ChuquillanqueОценок пока нет
- VARISTORESДокумент2 страницыVARISTORESmanuelОценок пока нет
- Informe N04 de Laboratorio Circuitos Electricos IДокумент15 страницInforme N04 de Laboratorio Circuitos Electricos ImanuelОценок пока нет
- Capitulo 7 TransformadorДокумент38 страницCapitulo 7 Transformadorgeorgebrescener64Оценок пока нет
- Ejemplos Teorema de BayesДокумент3 страницыEjemplos Teorema de BayesmanuelОценок пока нет
- La ComputadoraДокумент3 страницыLa Computadoramanuel100% (1)
- Prodai El ManualДокумент20 страницProdai El ManualGilbert River50% (2)
- Capitulo X GENÉTICAДокумент6 страницCapitulo X GENÉTICAArmy BtsОценок пока нет
- Temario EAES Con Simuladores y PreguntasДокумент10 страницTemario EAES Con Simuladores y PreguntasPEDRO GABRIEL NOBOA ROMEROОценок пока нет
- Grupo 3 Proyecto EstadisticaДокумент134 страницыGrupo 3 Proyecto EstadisticaKevin MejiaОценок пока нет
- Sesion 1 Guias AlimentariasДокумент39 страницSesion 1 Guias AlimentariasmiriamОценок пока нет
- Qdoc - Tips El Diezmo y La Iglesia Cristiana LibroДокумент189 страницQdoc - Tips El Diezmo y La Iglesia Cristiana LibroEric Méndez HerreraОценок пока нет
- Taller de Tesis 1 (Introductoria 1)Документ11 страницTaller de Tesis 1 (Introductoria 1)MARBLEMENDOZAОценок пока нет
- 2021 TF Tema Musculos de La Cara o FacialesДокумент3 страницы2021 TF Tema Musculos de La Cara o FacialesSebastian Sael Hernandez GuzmanОценок пока нет
- Sep TecnmДокумент22 страницыSep TecnmSaul's DiazОценок пока нет
- Me Separo y Ahora Que PDFДокумент35 страницMe Separo y Ahora Que PDFErika CardonaОценок пока нет
- 11 y 10 EVALUACIO ATOMO Y CEДокумент1 страница11 y 10 EVALUACIO ATOMO Y CECarlos TorrinОценок пока нет
- Trabajo Monografico Ética - Grupo 3Документ11 страницTrabajo Monografico Ética - Grupo 3Kait Beckham Heras HerreraОценок пока нет
- Recurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteДокумент6 страницRecurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteABOGADO PERCY CORONADO C.Оценок пока нет
- Informe de Suelos OficialДокумент23 страницыInforme de Suelos OficialMeyer Jose Rufasto VasquezОценок пока нет
- Demencia y Depresión (Triptico)Документ2 страницыDemencia y Depresión (Triptico)Yemer Villcas SalazarОценок пока нет
- Liquidos y Electrolitos en AnestesioДокумент55 страницLiquidos y Electrolitos en AnestesioJuan Carlos DelgadoОценок пока нет
- Dinamica - La VentanaДокумент2 страницыDinamica - La VentanaChristian SJ100% (1)
- Serie Banker 2. El Dictador - Penelope SkyДокумент245 страницSerie Banker 2. El Dictador - Penelope SkyJohannaGarces80% (5)
- Familia EnsanbladaДокумент6 страницFamilia EnsanbladaPaola FranciaОценок пока нет
- Taller N 2Документ2 страницыTaller N 2Daniel ValeroОценок пока нет
- Tarea 2Документ5 страницTarea 2SEBASTIAN OMAR CONTRERAS ROMEROОценок пока нет
- 00 OracionesДокумент13 страниц00 OracionesAlvaro SolisОценок пока нет
- 2.6. División Politica InternacionalДокумент69 страниц2.6. División Politica InternacionalOscar Mendiola100% (4)
- Discucion FilosoficaДокумент115 страницDiscucion FilosoficaLeopoldo Jose Ramirez LandaetaОценок пока нет
- El Análisis de La Causa RaízДокумент5 страницEl Análisis de La Causa RaízAnonymous hVlHBtoHTОценок пока нет
- Modelo de Prevención de Riesgos PsicosocialesДокумент5 страницModelo de Prevención de Riesgos PsicosocialesCatha MorenaОценок пока нет
- Infografía - Lo InhumanoДокумент2 страницыInfografía - Lo InhumanoLaurita CastañedaОценок пока нет
- La Lírica y La Métrica Esplicado.Документ31 страницаLa Lírica y La Métrica Esplicado.Malena Mayorga MejíasОценок пока нет
- Ide U3 Ea JehbДокумент11 страницIde U3 Ea JehbHB PaulОценок пока нет