Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Creating and Renewing Urban Structures - Tall Buildings, Bridges and InfrastructureДокумент2 страницыCreating and Renewing Urban Structures - Tall Buildings, Bridges and InfrastructureDesign explorer olomizanaОценок пока нет
- Diploma in Mechanical Engineering Colleges in NoidaДокумент3 страницыDiploma in Mechanical Engineering Colleges in NoidaGalgotias UniversityОценок пока нет
- Grade 6 Maths Paper 1Документ7 страницGrade 6 Maths Paper 1mtetwabОценок пока нет
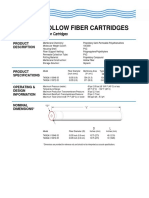
- Targa Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesДокумент2 страницыTarga Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesChristianus RudyantoОценок пока нет
- What We Mean by CreativityДокумент18 страницWhat We Mean by CreativityChris PetrieОценок пока нет
- Ultra Mag™ Electromagnetic Flow Meter Submittal PackageДокумент19 страницUltra Mag™ Electromagnetic Flow Meter Submittal PackageSalvador HernándezОценок пока нет
- Degrees of Plagiarism Activity PDFДокумент20 страницDegrees of Plagiarism Activity PDFDhamma_StorehouseОценок пока нет
- Biological PlausibilityДокумент2 страницыBiological PlausibilityTreeSix SolutionsОценок пока нет
- Cap Analysis: (Municipality of Calinog)Документ21 страницаCap Analysis: (Municipality of Calinog)mpdo calinogОценок пока нет
- What's Trending in Difference-In-DifferencesДокумент27 страницWhat's Trending in Difference-In-Differencesteddybear20072003Оценок пока нет
- Role of Geotechnical Properties of Soil On Civil Engineering StructuresДокумент8 страницRole of Geotechnical Properties of Soil On Civil Engineering StructuresSaša MarinОценок пока нет
- 41 SAfrican LJ269Документ6 страниц41 SAfrican LJ269Ruchira JoshiОценок пока нет
- Ifc 8thconf 4c4papДокумент29 страницIfc 8thconf 4c4papgauravpassionОценок пока нет
- ACT Crack Geology AnswersДокумент38 страницACT Crack Geology AnswersMahmoud EbaidОценок пока нет
- A Level Physics Units & SymbolДокумент3 страницыA Level Physics Units & SymbolXian Cong KoayОценок пока нет
- CAPE Entrepreneurship Module 1 (2023-2024 Syllabus)Документ22 страницыCAPE Entrepreneurship Module 1 (2023-2024 Syllabus)Shimmer100% (1)
- Department of Education: Republic of The PhilippinesДокумент36 страницDepartment of Education: Republic of The PhilippinesKristine Rose CADUTDUTОценок пока нет
- Leonardo Da Vinci I&S Essay Riccardo Cellentani M8AДокумент3 страницыLeonardo Da Vinci I&S Essay Riccardo Cellentani M8AVictorОценок пока нет
- The Principles and Practice of Naviga TionДокумент10 страницThe Principles and Practice of Naviga TionDin Muhammad MujahidОценок пока нет
- 10) Assessment On Performance and Challenges of EthiopianДокумент11 страниц10) Assessment On Performance and Challenges of EthiopianyaregalОценок пока нет
- Math 1st COДокумент6 страницMath 1st COfloriejanedОценок пока нет
- Bio Physics: Prepared by Gayathry SatheesanДокумент19 страницBio Physics: Prepared by Gayathry SatheesanrehandeshmukhОценок пока нет
- HDQJHJHRJQ 2Документ5 страницHDQJHJHRJQ 2hhhhhhhhhhhhОценок пока нет
- Construction Site & Lifting by CraneДокумент68 страницConstruction Site & Lifting by CraneShammas RajputОценок пока нет
- CBSE Class 10 Light Reflection and Refraction Study NotesДокумент19 страницCBSE Class 10 Light Reflection and Refraction Study NotesKanchana SriramuluОценок пока нет
- Effect of Coffee Processing Plant Effluent On The Physicochemical Properties of Receiving Water Bodies, Jimma Zone EthiopiaДокумент8 страницEffect of Coffee Processing Plant Effluent On The Physicochemical Properties of Receiving Water Bodies, Jimma Zone EthiopiaNigist FekedeОценок пока нет
- Uw Math Stat394 Hw4 SolДокумент4 страницыUw Math Stat394 Hw4 SolRizsОценок пока нет
- Forensic Analysis of GlassДокумент9 страницForensic Analysis of GlassAbrea AbellaОценок пока нет
- MFE Module 1 .Документ15 страницMFE Module 1 .Adarsh KОценок пока нет
- Rijwana Hussein Final EssayДокумент18 страницRijwana Hussein Final EssayhusseinrijwanaОценок пока нет