Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- GH13 Heavy Duty Body Installation Manual PDFДокумент132 страницыGH13 Heavy Duty Body Installation Manual PDFPrashant Sharma100% (14)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Snake Game Code in Assembly LanguageДокумент22 страницыSnake Game Code in Assembly LanguageMoaz MaalikОценок пока нет
- Case Study #3 ThermodynamicsДокумент6 страницCase Study #3 ThermodynamicsColeene Forteza100% (1)
- Content Analysis in The Social Sciences From Manual To Automated ApproachesДокумент75 страницContent Analysis in The Social Sciences From Manual To Automated Approachesdiablero999Оценок пока нет
- Healthcare Monitoring System and Transforming Monitored Data Into Real Time Clinical Feedback Based On Iot Using Raspberry PiДокумент7 страницHealthcare Monitoring System and Transforming Monitored Data Into Real Time Clinical Feedback Based On Iot Using Raspberry Pimikko intalОценок пока нет
- Sweet Potato (Ipomoea Batatas) Variety Recognizer Using Image Processing and Artificial Neural NetworkДокумент4 страницыSweet Potato (Ipomoea Batatas) Variety Recognizer Using Image Processing and Artificial Neural Networkmikko intalОценок пока нет
- Autonomous Tree Climbing Robot (TREEBO T) : Shrivathsan Naray Yanan, Vinoop.U, Satish.M, Yashw Wanth N.GДокумент5 страницAutonomous Tree Climbing Robot (TREEBO T) : Shrivathsan Naray Yanan, Vinoop.U, Satish.M, Yashw Wanth N.Gmikko intalОценок пока нет
- Bipolar Junction Transistor (BJT)Документ16 страницBipolar Junction Transistor (BJT)mikko intalОценок пока нет
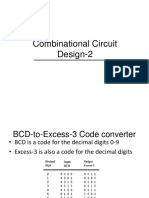
- Combinational Circuit Design-2Документ36 страницCombinational Circuit Design-2mikko intalОценок пока нет
- Table of ContentsДокумент3 страницыTable of Contentsmikko intalОценок пока нет
- Dear Provost Committee On Scholarship ReviewДокумент3 страницыDear Provost Committee On Scholarship Reviewmikko intalОценок пока нет
- Asic Lectrical Afety: ELECTRICAL/elbasic1/1-95Документ63 страницыAsic Lectrical Afety: ELECTRICAL/elbasic1/1-95mikko intalОценок пока нет
- Kabanata 7 - Rizal Sa Paris Hanggang Berlin: A Las Flores de Heidelberg - Ang Tulang Sinulat Ni Rizal SaДокумент7 страницKabanata 7 - Rizal Sa Paris Hanggang Berlin: A Las Flores de Heidelberg - Ang Tulang Sinulat Ni Rizal Samikko intalОценок пока нет
- Biomass Power PlantДокумент5 страницBiomass Power Plantmikko intalОценок пока нет
- Bt-Eet 3A Bt-Eet 3A: # 24 E. Natividad ST., Tabing-Ilog Marilao, BulacanДокумент4 страницыBt-Eet 3A Bt-Eet 3A: # 24 E. Natividad ST., Tabing-Ilog Marilao, Bulacanmikko intalОценок пока нет
- Thor - Ragnarok.2017.1080p.bluray.x264 (YTS - Am)Документ135 страницThor - Ragnarok.2017.1080p.bluray.x264 (YTS - Am)mikko intalОценок пока нет
- The Fate of The Furious 2017 720p HDTC x264 ShAaNiGДокумент114 страницThe Fate of The Furious 2017 720p HDTC x264 ShAaNiGmikko intalОценок пока нет
- ElevatorДокумент4 страницыElevatormikko intalОценок пока нет
- Name Tag Final (Autosaved)Документ3 страницыName Tag Final (Autosaved)mikko intalОценок пока нет
- Narrative Report Final 1 DOMINICДокумент23 страницыNarrative Report Final 1 DOMINICmikko intalОценок пока нет
- Class No.: 13 Name: Chester Madrigal Lorenzo Nickname: Ches City Address: Contact No.: Email Address: Guardian: Relationship: Contact No.Документ1 страницаClass No.: 13 Name: Chester Madrigal Lorenzo Nickname: Ches City Address: Contact No.: Email Address: Guardian: Relationship: Contact No.mikko intalОценок пока нет
- Aes MatlabДокумент32 страницыAes MatlabbalajithrillerОценок пока нет
- Gen Target-2017Документ22 страницыGen Target-2017SundeepОценок пока нет
- Tramlink Low-Floor Light Rail Vehicle: Rostocker Strassenbahn Ag, Rostock, GermanyДокумент2 страницыTramlink Low-Floor Light Rail Vehicle: Rostocker Strassenbahn Ag, Rostock, GermanyLuca Marius CristianОценок пока нет
- SWIMS Directory of LibrariesДокумент17 страницSWIMS Directory of LibrariessudakshinaroyОценок пока нет
- 6400t Rev-BДокумент4 страницы6400t Rev-BGloria HamiltonОценок пока нет
- The Scientist PDFДокумент68 страницThe Scientist PDFPetcu Adrian100% (1)
- Basic ProbabilityДокумент53 страницыBasic ProbabilityGhada SheashaОценок пока нет
- Fdot Precast Bent Cap Development and Implementation: AbstractДокумент10 страницFdot Precast Bent Cap Development and Implementation: AbstractCongOanh PHANОценок пока нет
- 5 Blasting Limit GuidelinesДокумент7 страниц5 Blasting Limit GuidelinesTry Oka Afandy SinagaОценок пока нет
- Cs9152 DBT Unit IV NotesДокумент61 страницаCs9152 DBT Unit IV NotesNivithaОценок пока нет
- Oral Presentations Ormrod 2015 06Документ23 страницыOral Presentations Ormrod 2015 06Miguel GonzalezОценок пока нет
- Sootblowing Sequence & TroubleshootingДокумент4 страницыSootblowing Sequence & TroubleshootingJunaid BaigОценок пока нет
- List of International and National Professional Bodies - PECДокумент4 страницыList of International and National Professional Bodies - PECerumerОценок пока нет
- E3D2 1version-1Документ12 страницE3D2 1version-1Nikolay NachevОценок пока нет
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Документ24 страницыData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainОценок пока нет
- DC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualДокумент23 страницыDC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualdedekeetОценок пока нет
- Hydraulic Cartridge SystemsДокумент14 страницHydraulic Cartridge SystemsJas SumОценок пока нет
- 390 Track Bolt M0079195Документ2 страницы390 Track Bolt M0079195joshpbenzОценок пока нет
- Xid-2025857 1Документ6 страницXid-2025857 1Thanh NguyenОценок пока нет
- Individual: DR Winnie Louis LeeДокумент27 страницIndividual: DR Winnie Louis Leeedn_mj1645Оценок пока нет
- Color Code - Canadian Standard - ABES - PROD.PW - MC.B017.E24806.ATTA003Документ14 страницColor Code - Canadian Standard - ABES - PROD.PW - MC.B017.E24806.ATTA003Adam Michael GreenОценок пока нет
- 4 - 5.1 - Fluid Action On Surfaces (Plane Surface)Документ16 страниц4 - 5.1 - Fluid Action On Surfaces (Plane Surface)Jacky CagampanОценок пока нет
- Heat ConductionДокумент11 страницHeat ConductionAlex Samuel SilvaОценок пока нет
- TGS8100 Product InfomationДокумент10 страницTGS8100 Product Infomationbemxgm-1Оценок пока нет
- C/C++ Programming Language NotesДокумент68 страницC/C++ Programming Language Notesctf challengeОценок пока нет
- Module Tes Answer Key: Student B Student AДокумент2 страницыModule Tes Answer Key: Student B Student AKremena KoevaОценок пока нет