Вам также может понравиться
- Numerical Methods Ch:Ode Equation and Its Practical ApplicationДокумент38 страницNumerical Methods Ch:Ode Equation and Its Practical ApplicationSupriya RaiОценок пока нет
- Mat 102 (Unit1,2) PDFДокумент51 страницаMat 102 (Unit1,2) PDFSachin AryanОценок пока нет
- Some Solved Differential Equations Problems PDFДокумент123 страницыSome Solved Differential Equations Problems PDFRafael Bermudez100% (1)
- OBJECTIVE MATHEMATICS For IIT-JEE (Mains/Advance)Документ229 страницOBJECTIVE MATHEMATICS For IIT-JEE (Mains/Advance)WIN POINT Educations91% (57)
- Notes On Diffy Q's Jiri Lebl PDFДокумент466 страницNotes On Diffy Q's Jiri Lebl PDFJulio HernandezОценок пока нет
- SMO Algebra IДокумент18 страницSMO Algebra IJmex MkОценок пока нет
- Moment Generation FunctionДокумент38 страницMoment Generation FunctionAzwan MahmudОценок пока нет
- Ordinary Differential EquationsДокумент238 страницOrdinary Differential EquationsMadelynneОценок пока нет
- WEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsДокумент19 страницWEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsMaryem ZubairОценок пока нет
- Math 10-Graphing-Polynomial-FunctionsДокумент36 страницMath 10-Graphing-Polynomial-FunctionsStephanie MonesitОценок пока нет
- Linear Differential EquationsДокумент37 страницLinear Differential Equationsbhatsindhoor100% (1)
- Application of Laplace Transform Homotopy Perturbation Method To Nonlinear Partial Differential EquationsДокумент5 страницApplication of Laplace Transform Homotopy Perturbation Method To Nonlinear Partial Differential EquationsesatjournalsОценок пока нет
- Thesis Paulo LyraДокумент376 страницThesis Paulo LyraGusgaraОценок пока нет
- Interpolation, Extrapolations and Difference OperatorsДокумент16 страницInterpolation, Extrapolations and Difference Operatorsabdul latifОценок пока нет
- 3.1 Graphs of Polynomial FunctionsДокумент17 страниц3.1 Graphs of Polynomial FunctionsJonalyn Bautista-CanlasОценок пока нет
- The Application of Differential Equations in ElectricalДокумент4 страницыThe Application of Differential Equations in ElectricalJad Azar100% (1)
- A Brief Introduction To Laplace Transformation - As Applied in Vibrations IДокумент9 страницA Brief Introduction To Laplace Transformation - As Applied in Vibrations Ikravde1024Оценок пока нет
- Study On Different Numerical Methods For Solving Differential EquationsДокумент133 страницыStudy On Different Numerical Methods For Solving Differential EquationsMahtab Uddin100% (1)
- Functional AnalysisДокумент37 страницFunctional AnalysisCarlos RogerОценок пока нет
- Differential Equation: Not To Be Confused WithДокумент11 страницDifferential Equation: Not To Be Confused WithDeenОценок пока нет
- Comparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsДокумент3 страницыComparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsEditor IJTSRDОценок пока нет
- Unit-3 Application of Differential EquationДокумент20 страницUnit-3 Application of Differential EquationRock TalОценок пока нет
- Integral and Finite Difference Inequalities and ApplicationsОт EverandIntegral and Finite Difference Inequalities and ApplicationsОценок пока нет
- Math10 LM U2 PDFДокумент182 страницыMath10 LM U2 PDFMildred Eyao100% (3)
- Inequalities for Differential and Integral EquationsОт EverandInequalities for Differential and Integral EquationsОценок пока нет
- Complex Analysis For Mathematics and Engineering CompressДокумент792 страницыComplex Analysis For Mathematics and Engineering CompressĐào RubyОценок пока нет
- Math 10 q1 WK 9 Module 9 Solving Problems in Polynomials and Polynomial EquationsДокумент22 страницыMath 10 q1 WK 9 Module 9 Solving Problems in Polynomials and Polynomial EquationsChaz grant borromeoОценок пока нет
- Dynamical Systems Method for Solving Nonlinear Operator EquationsОт EverandDynamical Systems Method for Solving Nonlinear Operator EquationsРейтинг: 5 из 5 звезд5/5 (1)
- ProjectДокумент39 страницProjectJeo C AuguinОценок пока нет
- Project MphilДокумент64 страницыProject Mphilrameshmaths_aplОценок пока нет
- Application Differential EquationДокумент37 страницApplication Differential EquationNida KhairiyahОценок пока нет
- Lab 04 Eigen Value Partial Pivoting and Elimination PDFДокумент12 страницLab 04 Eigen Value Partial Pivoting and Elimination PDFUmair Ali ShahОценок пока нет
- Moment Generating FunctionДокумент11 страницMoment Generating FunctionDevanand T SanthaОценок пока нет
- Application of Differential EquationДокумент42 страницыApplication of Differential EquationabhishekОценок пока нет
- Application of Eigenvalues and Eigenvectors.Документ10 страницApplication of Eigenvalues and Eigenvectors.Harish BОценок пока нет
- First Order Differential Equation and Its Application in Radio Active Decay and Carbon DatingДокумент19 страницFirst Order Differential Equation and Its Application in Radio Active Decay and Carbon DatingWakgari Waif50% (2)
- Eigenvalues and EigenvectorsДокумент24 страницыEigenvalues and EigenvectorswkpfckgwОценок пока нет
- Differntial Equations ProjectДокумент28 страницDifferntial Equations ProjectSai CharanОценок пока нет
- Linear First Order ODEДокумент25 страницLinear First Order ODEGustavОценок пока нет
- Partial Differential Equations For Engin PDFДокумент141 страницаPartial Differential Equations For Engin PDFمصطفى العباديОценок пока нет
- Radius of CurvatureДокумент15 страницRadius of CurvatureLakshayОценок пока нет
- Math Diff PDFДокумент315 страницMath Diff PDFMohit SharmaОценок пока нет
- Application of Differential Equation in Computer ScienceДокумент6 страницApplication of Differential Equation in Computer ScienceUzair Razzaq100% (1)
- Complex NumbersДокумент12 страницComplex Numbersadil4083Оценок пока нет
- Unit-1 Analytic FunctionsДокумент30 страницUnit-1 Analytic FunctionsChandradeep Reddy Teegala100% (1)
- Vector Operators: Grad, Div and Curl: 5.1 The Gradient of A Scalar FieldДокумент21 страницаVector Operators: Grad, Div and Curl: 5.1 The Gradient of A Scalar FieldRajendra PrasathОценок пока нет
- Power Series Solutions and Special Functions: Review of Power SeriesДокумент25 страницPower Series Solutions and Special Functions: Review of Power SerieschajedamanОценок пока нет
- Functions of Bounded VariationДокумент30 страницFunctions of Bounded VariationSee Keong Lee100% (1)
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsДокумент11 страницNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalОценок пока нет
- Anti DerivativesДокумент21 страницаAnti DerivativesHanna GalatiОценок пока нет
- Intro DEДокумент17 страницIntro DEGeanno PolinagОценок пока нет
- 2 Analytic FunctionДокумент5 страниц2 Analytic FunctionAshutosh Singh100% (2)
- Numerical Analysis PDFДокумент15 страницNumerical Analysis PDFaauppalОценок пока нет
- Module 2 Vector Spaces FundamentalsДокумент33 страницыModule 2 Vector Spaces FundamentalsG MahendraОценок пока нет
- Laplace TransformДокумент18 страницLaplace Transformmim16Оценок пока нет
- Lecture of Vector NormsДокумент16 страницLecture of Vector NormsEnes ŞavlıОценок пока нет
- MA8151 Engineering Mathematics SyllabusДокумент2 страницыMA8151 Engineering Mathematics SyllabusPAMANI1981Оценок пока нет
- Exact Differential EquationsДокумент17 страницExact Differential EquationsWASEEM_AKHTERОценок пока нет
- Power SeriesДокумент6 страницPower Seriesbpn_kОценок пока нет
- Lax-Milgram Lemma and ApplicationsДокумент6 страницLax-Milgram Lemma and Applicationsjnds9413Оценок пока нет
- Complex Numbers Review WorksheetДокумент4 страницыComplex Numbers Review WorksheetJaneth CaindoyОценок пока нет
- Vector and Matrix NormДокумент17 страницVector and Matrix NormpaivensolidsnakeОценок пока нет
- Introduction to the Theory of Linear Partial Differential EquationsОт EverandIntroduction to the Theory of Linear Partial Differential EquationsОценок пока нет
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970От EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardОценок пока нет
- Numerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961От EverandNumerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961Оценок пока нет
- Rational Functions PDFДокумент41 страницаRational Functions PDFSaraОценок пока нет
- Miscellaneous Exercise 3Документ19 страницMiscellaneous Exercise 3Tifeny SengОценок пока нет
- 2018 03 08 10 45 38Документ31 страница2018 03 08 10 45 38Abin Satheesh Manu100% (1)
- Numerical Analysis - MTH603 Handouts Lecture 3Документ7 страницNumerical Analysis - MTH603 Handouts Lecture 3SHAKEEL IQBALОценок пока нет
- Algebra Tiebreaker Solutions - 2 PDFДокумент2 страницыAlgebra Tiebreaker Solutions - 2 PDFmarioasensicollantesОценок пока нет
- TA Examination Sample Construct - 1Документ3 страницыTA Examination Sample Construct - 1snehalОценок пока нет
- Quadratic Advanced WorksheetДокумент6 страницQuadratic Advanced WorksheetSujal SОценок пока нет
- 02b Theory of EquationsДокумент4 страницы02b Theory of EquationsSanjay GuptaОценок пока нет
- Nature of RootsДокумент13 страницNature of RootsAnnie Glen LovesParamore CanilaoОценок пока нет
- Unit 1 Complex NumbersДокумент18 страницUnit 1 Complex NumbersS CoОценок пока нет
- Diwali Assignment STD 10 MathsДокумент17 страницDiwali Assignment STD 10 Mathsdeepest goodsОценок пока нет
- Math Formula Sheet AIEEE PDFДокумент122 страницыMath Formula Sheet AIEEE PDFGaurav RegmiОценок пока нет
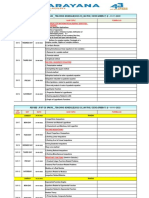
- Revised (Maths) - JR Iit Co Spark - Teaching Schedule & QP Allotment - 2022-23 (Code - Green-7) - 01-11-2022Документ15 страницRevised (Maths) - JR Iit Co Spark - Teaching Schedule & QP Allotment - 2022-23 (Code - Green-7) - 01-11-2022VamshiОценок пока нет
- INMO 2021 SolutionsДокумент8 страницINMO 2021 SolutionsMonika BansalОценок пока нет
- HR 2 TES0 G Zyq NSB QRNDM 1Документ77 страницHR 2 TES0 G Zyq NSB QRNDM 1GHØUL GAMING KenshiroОценок пока нет
- Mat 104 Tutorials Set 1 PDFДокумент2 страницыMat 104 Tutorials Set 1 PDFKwadwo Appiah-BoatengОценок пока нет
- Algebra - Most Important Question Bank For JEE MainДокумент32 страницыAlgebra - Most Important Question Bank For JEE MainyyОценок пока нет
- Rational Zero Theorem and Decarts Rule of SignДокумент21 страницаRational Zero Theorem and Decarts Rule of SignCedrick Nicolas ValeraОценок пока нет
- Polynomials AdityaДокумент3 страницыPolynomials AdityaPritam BeraОценок пока нет
- SSC Maths SMART ACADEMYДокумент25 страницSSC Maths SMART ACADEMYaheadkhan593Оценок пока нет
- A1 U4 LP Identifying Zeros of Equations AAPR3Документ48 страницA1 U4 LP Identifying Zeros of Equations AAPR3Via Terrado CañedaОценок пока нет
- 2C NOTES Polynomial Graphs PDFДокумент7 страниц2C NOTES Polynomial Graphs PDFKauai PauleОценок пока нет
- Solutions Indian National Mathematical Olympiad (INMO-2021) : For For For For ForДокумент5 страницSolutions Indian National Mathematical Olympiad (INMO-2021) : For For For For ForBhavya SharmaОценок пока нет
- 2-4 Zeros of PolynomialsДокумент14 страниц2-4 Zeros of PolynomialsKautharОценок пока нет