Вам также может понравиться
- A2 Particle Physics Worksheet PDF MS - Part 2Документ18 страницA2 Particle Physics Worksheet PDF MS - Part 2TahirОценок пока нет
- Tutorial Letter 101/3/2021: WavesДокумент12 страницTutorial Letter 101/3/2021: WavesTshepo MolotoОценок пока нет
- ASSESSMENT Geography Climate Regions Assessment GR 8 T2 Assessment PrintoutДокумент9 страницASSESSMENT Geography Climate Regions Assessment GR 8 T2 Assessment PrintoutUKiid Aarh Loh BafethuОценок пока нет
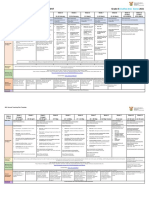
- 2021 Creative Arts Dance ATP GR 8 Term 1-4Документ4 страницы2021 Creative Arts Dance ATP GR 8 Term 1-4siyabonga mpofu100% (1)
- Differential EquationsДокумент12 страницDifferential EquationsJoshua Carlo EnriquezОценок пока нет
- Effingham Secondary School Department of Geography Social Studies - Geography Grade 8 Revision Activity 1 Define The Following TermsДокумент2 страницыEffingham Secondary School Department of Geography Social Studies - Geography Grade 8 Revision Activity 1 Define The Following TermsStacey Nefdt100% (1)
- Grade 9 Geography T4 ControlledДокумент10 страницGrade 9 Geography T4 Controllednaledibotshelo14Оценок пока нет
- Bum 2133 Ordinary Differrential Equations Final Exam PaperДокумент4 страницыBum 2133 Ordinary Differrential Equations Final Exam PaperAzil14Оценок пока нет
- Basic Concepts: Partial Differential Equations (Pde)Документ19 страницBasic Concepts: Partial Differential Equations (Pde)Aztec MayanОценок пока нет
- MAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementДокумент11 страницMAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementTorcoxk Namgay100% (1)
- Lecture Notes (Chapter 1.3 Partial Derivative)Документ10 страницLecture Notes (Chapter 1.3 Partial Derivative)Shaktivell LetchumananОценок пока нет
- Transformation Geometry For 2nd Year Mathematics 1 PDFДокумент46 страницTransformation Geometry For 2nd Year Mathematics 1 PDFSingitan HundeОценок пока нет
- Grade 6 Geography Exam Nov 2018 WatermarkДокумент6 страницGrade 6 Geography Exam Nov 2018 WatermarkRaeesa SОценок пока нет
- Transformation of Functions MsДокумент4 страницыTransformation of Functions MssalmasomaОценок пока нет
- Hurlstone 2008 4U CT1 & SolutionsДокумент6 страницHurlstone 2008 4U CT1 & SolutionsmemeОценок пока нет
- Polynomials Hand in Assignment #1Документ5 страницPolynomials Hand in Assignment #1cuteangel_103Оценок пока нет
- GEOGRAPHY P1 GR11 QP NOV2018 - English PDFДокумент15 страницGEOGRAPHY P1 GR11 QP NOV2018 - English PDFtrevorОценок пока нет
- Dynamics: Meriam J.L., Kraige L.G. Engineering MechanicsДокумент5 страницDynamics: Meriam J.L., Kraige L.G. Engineering MechanicsAnnie ZhangОценок пока нет
- Qualitative Graphs Practice: (Example 1)Документ2 страницыQualitative Graphs Practice: (Example 1)MALAK SHEHADEHОценок пока нет
- Differentiation Question Bank Maths LДокумент60 страницDifferentiation Question Bank Maths LUmair Khan MarwatОценок пока нет
- Lecture Notes (Chapter 2.3 Triple Integral)Документ5 страницLecture Notes (Chapter 2.3 Triple Integral)shinee_jayasila2080100% (1)
- Functions Assignment With SolutionsДокумент7 страницFunctions Assignment With SolutionsSiddhartha ChoudhuryОценок пока нет
- Differentiation of Logarithmic FunctionДокумент11 страницDifferentiation of Logarithmic FunctionMaria AndresОценок пока нет
- Pure Mathematics Revision Worksheet Month 7Документ3 страницыPure Mathematics Revision Worksheet Month 7Le Jeu LifeОценок пока нет
- Complex NumbersДокумент60 страницComplex NumbersATF ChannelОценок пока нет
- NS Grade 8 Test November 2021 Past PaperДокумент7 страницNS Grade 8 Test November 2021 Past Paperkatolicious638100% (1)
- Maths PPT 1-1Документ24 страницыMaths PPT 1-1RoshanОценок пока нет
- Differential Equations - Solved Assignments - Semester Summer 2007Документ28 страницDifferential Equations - Solved Assignments - Semester Summer 2007Muhammad UmairОценок пока нет
- Life Sciences P2 Nov 2010 Memo EngДокумент14 страницLife Sciences P2 Nov 2010 Memo Engbellydanceafrica9540100% (1)
- MA1201 Tutorial Unit1 2 12 13Документ4 страницыMA1201 Tutorial Unit1 2 12 13Krishna sahОценок пока нет
- Worksheet 6 Numeric and Geometric Patterns Grade 9 MathsДокумент2 страницыWorksheet 6 Numeric and Geometric Patterns Grade 9 MathsneelofahОценок пока нет
- VJC JC1 H2 Math Revision Package 2023Документ56 страницVJC JC1 H2 Math Revision Package 2023vincesee85Оценок пока нет
- Implicit Differentiation WorksheetДокумент2 страницыImplicit Differentiation WorksheetDanelОценок пока нет
- Putnam Exam Calculus ProblemsДокумент9 страницPutnam Exam Calculus ProblemstadkarОценок пока нет
- Proof by InductionДокумент2 страницыProof by InductionAnonymous NGh7xTPKyОценок пока нет
- Physics - Unit 1 (Mechanics)Документ49 страницPhysics - Unit 1 (Mechanics)hippohorse100% (1)
- 47 Test Bank 11Документ14 страниц47 Test Bank 11Pamela HancockОценок пока нет
- Grade 8 and 9 Item Banks For RevisionДокумент131 страницаGrade 8 and 9 Item Banks For RevisionNhlanzeko Nhlanzeko100% (1)
- 1.1 Definitions and TerminologyДокумент9 страниц1.1 Definitions and TerminologyIzzati KamalОценок пока нет
- Matrices NotesДокумент65 страницMatrices NotesppОценок пока нет
- 2.3 and 2.4 Differentiation FormulasДокумент12 страниц2.3 and 2.4 Differentiation FormulasMaylalaine AguinaldoОценок пока нет
- Section 1.5 General Second Degree Equations PDFДокумент3 страницыSection 1.5 General Second Degree Equations PDFRaymart Leyson100% (1)
- Linear and Non Linear Simultaneous Equations CSEC TOPICДокумент1 страницаLinear and Non Linear Simultaneous Equations CSEC TOPICLatoyaWatkinsОценок пока нет
- Assignment Chapter 6: Vectors: Answer AnswerДокумент19 страницAssignment Chapter 6: Vectors: Answer AnswerDonna AminolaОценок пока нет
- CALCUL - Applications of Partial Differentiation PDFДокумент28 страницCALCUL - Applications of Partial Differentiation PDFOctav MiranorОценок пока нет
- Assignment-1 (Linear Algebra)Документ3 страницыAssignment-1 (Linear Algebra)DEBOJIT CHATTERJEEОценок пока нет
- Loci in The Complex PlaneДокумент11 страницLoci in The Complex PlaneAnne ZhangОценок пока нет
- Principles of Math 12 - Transformations Practice Exam Answers PDFДокумент13 страницPrinciples of Math 12 - Transformations Practice Exam Answers PDFTim_C100% (1)
- 2 Arithmetic and Geometric Progressions (APs and GPS)Документ17 страниц2 Arithmetic and Geometric Progressions (APs and GPS)michaelsimba chorumaОценок пока нет
- F6MHL Tutorial On Exp - Log - Rational FnsДокумент6 страницF6MHL Tutorial On Exp - Log - Rational FnsMavesh DamodaranОценок пока нет
- Math Centre: 4 Unit Math Homework For Year 12 (Worked Answers)Документ20 страницMath Centre: 4 Unit Math Homework For Year 12 (Worked Answers)Jonathan ChiuОценок пока нет
- General Mathematics SS3 2ND Term SchemeДокумент2 страницыGeneral Mathematics SS3 2ND Term Schemesam kaluОценок пока нет
- Trigo IdentitiesДокумент29 страницTrigo IdentitiesKunalKaushikОценок пока нет
- English Fal Grade 10 Catch UpДокумент8 страницEnglish Fal Grade 10 Catch UpNoxolo MotloungОценок пока нет
- 15 Finding Center and Radius of A CircleДокумент5 страниц15 Finding Center and Radius of A CircleElaine BarrosОценок пока нет
- NJC Sequence and Series Lecture Notes and Tutorial Teachers EditionДокумент20 страницNJC Sequence and Series Lecture Notes and Tutorial Teachers EditionbhimabiОценок пока нет
- MMCДокумент5 страницMMCGen Li TogyОценок пока нет
- Mmgurtzxsedfghbnm MN VcdrtyjДокумент8 страницMmgurtzxsedfghbnm MN VcdrtyjMihica KhareОценок пока нет
- Orbital Dynamics: 3.1 Two-Body Central ForceДокумент24 страницыOrbital Dynamics: 3.1 Two-Body Central ForceJohn BirdОценок пока нет
- 1552649396E textofChapter3Module4Документ12 страниц1552649396E textofChapter3Module4davididosa40Оценок пока нет
- QuestionBank Projection of SolidsДокумент4 страницыQuestionBank Projection of SolidsAmritanshu AmritОценок пока нет
- Multivector Review Center Co.: Supplementary ProblemsДокумент3 страницыMultivector Review Center Co.: Supplementary ProblemsJohn Elver VeriОценок пока нет
- Engineering Graphics Befy Pune UniversityДокумент92 страницыEngineering Graphics Befy Pune UniversityAkshay BirajdarОценок пока нет
- Co 4Документ6 страницCo 4Jhon Lhoyd CorpuzОценок пока нет
- Multimedia CommunicationДокумент80 страницMultimedia CommunicationAlpesh ThesiyaОценок пока нет
- Satellite Orbit DynamicsДокумент61 страницаSatellite Orbit DynamicsAarush BhattacharjeeОценок пока нет
- HyperbolaДокумент160 страницHyperbolawacaha2019Оценок пока нет
- NCERT Solutions Class 11 Maths Chapter 11 Conic SectionsДокумент29 страницNCERT Solutions Class 11 Maths Chapter 11 Conic SectionsMayank ChaudharyОценок пока нет
- Cartesian Coordinates: Semi-Major Axis Semi-Minor AxisДокумент7 страницCartesian Coordinates: Semi-Major Axis Semi-Minor AxisascdasdcОценок пока нет
- The Laws of Planetary Motion: KeplerДокумент25 страницThe Laws of Planetary Motion: KeplerMuhammad TawqeerОценок пока нет
- Ellipse Formulae SheetДокумент6 страницEllipse Formulae SheetShehbaz ThakurОценок пока нет
- Test Bank For Anatomy Physiology The Unity of Form and Function 8th EditionДокумент24 страницыTest Bank For Anatomy Physiology The Unity of Form and Function 8th EditionAaronBrownpnmb100% (47)
- 06 Udf Flow PDFДокумент19 страниц06 Udf Flow PDFAdrian García MoyanoОценок пока нет
- How To Use TruTops PFOДокумент47 страницHow To Use TruTops PFORigoberto GONZALEZ SUAREZ100% (1)
- Introduction of Engineering DrawingДокумент179 страницIntroduction of Engineering Drawingmyyna93Оценок пока нет
- Hohmann Transfer and Mission AnalysisДокумент24 страницыHohmann Transfer and Mission AnalysisRajaswi BeleОценок пока нет
- 10 - Areas of Bounded Regions PDFДокумент8 страниц10 - Areas of Bounded Regions PDFthinkiitОценок пока нет
- Review Pre Lim ExamДокумент72 страницыReview Pre Lim ExamMel Kris MamigoОценок пока нет
- MGU-Btech Syllabus MEДокумент138 страницMGU-Btech Syllabus MEDevasivan CsrОценок пока нет
- Engineering DrawingДокумент16 страницEngineering DrawingDhaya VОценок пока нет
- Files/keplers - Laws - Es - PDF: Kepler Activity SourceДокумент5 страницFiles/keplers - Laws - Es - PDF: Kepler Activity SourceREGINA SANTIAGOОценок пока нет
- Machines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance MotorsДокумент28 страницMachines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance Motorsrobert_lascuОценок пока нет
- Combining Error Ellipses: John E. DavisДокумент17 страницCombining Error Ellipses: John E. DavisAzem GanuОценок пока нет
- DE01 SolДокумент117 страницDE01 SolvamsiprasannakoduruОценок пока нет
- Mat061 Chapter 2Документ40 страницMat061 Chapter 2Enaira100% (1)
- q1 Precal Notes (In Progress)Документ20 страницq1 Precal Notes (In Progress)saturosjuliaclarisseОценок пока нет
- Shs Pre Calculus 1st QuarterДокумент87 страницShs Pre Calculus 1st Quartermarvin siegaОценок пока нет
- Physics: Form 4 Theme 2 Newtonian MechanicsДокумент22 страницыPhysics: Form 4 Theme 2 Newtonian MechanicsYogaraajaa SeemarajaОценок пока нет
- Algebra 2 Chapter 7Документ27 страницAlgebra 2 Chapter 7April Anne FranciscoОценок пока нет
- 06 Udf FlowДокумент19 страниц06 Udf FlowOctavio SnОценок пока нет