Вам также может понравиться
- Sistemas de PropulsiónДокумент6 страницSistemas de PropulsiónKellyannis Campos UricareОценок пока нет
- Sistemas de PropulsiónДокумент7 страницSistemas de Propulsiónjeynner sanchezОценок пока нет
- Trabajo de PropulsoresДокумент5 страницTrabajo de Propulsoresdieg0rОценок пока нет
- Yates - Propulsion y Gobierno PDFДокумент7 страницYates - Propulsion y Gobierno PDFtooomo33100% (1)
- La Función Primaria de Cualquier Motor Marino o Motor de Planta Es Convertir La Energía Química de Un Combustible en Trabajo Útil y Usar Ese Trabajo en La Propulsión Del BarcoДокумент9 страницLa Función Primaria de Cualquier Motor Marino o Motor de Planta Es Convertir La Energía Química de Un Combustible en Trabajo Útil y Usar Ese Trabajo en La Propulsión Del BarcofranciscochamiaОценок пока нет
- FernandezBaldomir Carlos TFG 2016 02de10Документ4 страницыFernandezBaldomir Carlos TFG 2016 02de10Pedro QY IIОценок пока нет
- Hélices de Paso Fijo Hélices de Paso Variables Hélices de Paso Controlable Sistemas de Tobera Azimutales Water JetsДокумент7 страницHélices de Paso Fijo Hélices de Paso Variables Hélices de Paso Controlable Sistemas de Tobera Azimutales Water JetsEmili VillarroelОценок пока нет
- HÉLICESДокумент15 страницHÉLICESDavid Ninaquispe BardalesОценок пока нет
- HélicesДокумент13 страницHélicesMery GonzalezОценок пока нет
- El Sistema Propulsivo Del BuqueДокумент3 страницыEl Sistema Propulsivo Del BuqueDaniel Salazar RojasОценок пока нет
- Helices y GobernadoresДокумент21 страницаHelices y GobernadoresEfrsin Gasca VázquezОценок пока нет
- Cap IVДокумент32 страницыCap IVAlberto CometОценок пока нет
- Historia y Evolucion de Los BuquesДокумент15 страницHistoria y Evolucion de Los BuquesRogermen780% (1)
- Pique de Proa o Rasel de ProaДокумент14 страницPique de Proa o Rasel de ProaNiito's- Cesar ジ0% (1)
- PropelaДокумент5 страницPropelaZaida ViloriaОценок пока нет
- Buques de Guerra en El Siglo XXI EДокумент7 страницBuques de Guerra en El Siglo XXI EAndres FavaОценок пока нет
- Chimenea de Un BuqueДокумент6 страницChimenea de Un BuqueSilviaRinconCardonaОценок пока нет
- Barco de VaporДокумент4 страницыBarco de VaporJose AntonioОценок пока нет
- HELICESДокумент6 страницHELICESDavid NinaquispeОценок пока нет
- Barco de VaporДокумент8 страницBarco de VaporIraiz YemiletОценок пока нет
- Timón (Dispositivo)Документ10 страницTimón (Dispositivo)Jose Esteban MillatureoОценок пока нет
- HidroalaДокумент3 страницыHidroalaDavid RengelОценок пока нет
- HelicesДокумент53 страницыHelicesYisnervys Rojas Seniior100% (1)
- Sistema de Construccion NavalДокумент13 страницSistema de Construccion NavalAndres BarlizaОценок пока нет
- Historia de La PropulsiónДокумент2 страницыHistoria de La PropulsiónGabriel GonzalezОценок пока нет
- Sistemas de Maniobra Con Hélices de ProaДокумент26 страницSistemas de Maniobra Con Hélices de Proarey7tg9201Оценок пока нет
- Sistemas de Propulsion de Un BuqueДокумент7 страницSistemas de Propulsion de Un BuqueCarlos HidalgoОценок пока нет
- Hélices (Tipos y Principios)Документ6 страницHélices (Tipos y Principios)Edwin BalderasОценок пока нет
- Sistema de Propulsión WaterjetДокумент21 страницаSistema de Propulsión WaterjetOrlando QuevedoОценок пока нет
- Barco de Vapor - HistoriaДокумент3 страницыBarco de Vapor - HistoriaOsvaldo GalindoОценок пока нет
- Clasificacion NavalДокумент17 страницClasificacion Navalnatalia eugeniaОценок пока нет
- 44505-7407-Duques de AlbaДокумент13 страниц44505-7407-Duques de AlbaLANDEROS CARREON JOSE IVANОценок пока нет
- HélicesДокумент4 страницыHélicesEli MartinezОценок пока нет
- Tema 5 BotaduraДокумент19 страницTema 5 BotaduraDARIANA CARVAJAL100% (1)
- Qué Es Un VeleroДокумент5 страницQué Es Un VeleroAli TorresОценок пока нет
- Introducción A La Resistencia y Propulsion (Lector)Документ120 страницIntroducción A La Resistencia y Propulsion (Lector)manuelux1100% (5)
- Trabajo Sobre Propulsion Naval y HelicesДокумент19 страницTrabajo Sobre Propulsion Naval y HelicesJesus Leonardo Molina WefferОценок пока нет
- Popa y CodasteДокумент10 страницPopa y CodasteAllison HenleyОценок пока нет
- Tipos de Izaje de Un BuqueДокумент8 страницTipos de Izaje de Un BuqueCharlie Aguero PorrasОценок пока нет
- Sistema de PropulsiónДокумент15 страницSistema de PropulsiónChinaleongEileemОценок пока нет
- Jarcia y ArboladuraДокумент17 страницJarcia y Arboladurayoselyn bruzualОценок пока нет
- Conceptos de Un BuqueДокумент6 страницConceptos de Un BuqueEfrain DeulofeuОценок пока нет
- Motor de Vapor MarДокумент29 страницMotor de Vapor MarMerlysОценок пока нет
- AparejosДокумент8 страницAparejosAnonymous hR3e8SsОценок пока нет
- Partes de BuqueДокумент6 страницPartes de BuqueJuan Salinas100% (1)
- VelerosДокумент15 страницVelerosjlcisnerosmxlОценок пока нет
- TRANSMISIONДокумент9 страницTRANSMISIONCristopher A. García GnzОценок пока нет
- Sistemas EstabilizadoresДокумент6 страницSistemas EstabilizadoresMoisés Isaías Cedeño RoqueОценок пока нет
- Archivo1144960 1636550987Документ25 страницArchivo1144960 1636550987HiCarlОценок пока нет
- Historia Del Barco A VaporДокумент17 страницHistoria Del Barco A VaporerikaОценок пока нет
- Driza en La Superficie Como El Sumergible - Alvin - Usado para La Investigación Del Famoso Hundimiento Del TitanicДокумент4 страницыDriza en La Superficie Como El Sumergible - Alvin - Usado para La Investigación Del Famoso Hundimiento Del TitanicAndres lopezОценок пока нет
- Historia de Propulsion NavalДокумент3 страницыHistoria de Propulsion NavalReyAn Milla Garcia0% (2)
- Aplicaciones CarenaДокумент16 страницAplicaciones CarenaJS Vargas TОценок пока нет
- CONCEPTOS FUNDAMENTALES DE TERMINOLOGíA NAVAL - ACTUALIZADOДокумент35 страницCONCEPTOS FUNDAMENTALES DE TERMINOLOGíA NAVAL - ACTUALIZADOFauxTa SagreОценок пока нет
- Materiales TerminadoДокумент36 страницMateriales TerminadoAdriana Leiva DezaОценок пока нет
- Ing. Naval, Mecanica y Sistemas.Документ13 страницIng. Naval, Mecanica y Sistemas.nimiОценок пока нет
- HydrofoilsДокумент11 страницHydrofoilsErick MaasОценок пока нет
- D7788BNG EsДокумент25 страницD7788BNG EsXavi RedondoОценок пока нет
- Combustible Aceite Agua de Refrigeracion46 02 200322-01Документ24 страницыCombustible Aceite Agua de Refrigeracion46 02 200322-01Xavi RedondoОценок пока нет
- Sistema de LubricaciónДокумент14 страницSistema de LubricaciónXavi RedondoОценок пока нет
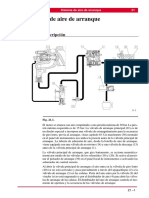
- Sistema de Aire de Arranque: 21.1. DescripciónДокумент12 страницSistema de Aire de Arranque: 21.1. DescripciónXavi RedondoОценок пока нет
- Sistema de Aire de Arranque: 21.1. DescripciónДокумент12 страницSistema de Aire de Arranque: 21.1. DescripciónXavi RedondoОценок пока нет
- Símbolos HidráulicosДокумент11 страницSímbolos HidráulicosXavi RedondoОценок пока нет
- Hora Fecha y Lugar TeoriaДокумент1 страницаHora Fecha y Lugar TeoriaXavi RedondoОценок пока нет
- Fitxa Tecnica Targeta Valor ConsignaДокумент4 страницыFitxa Tecnica Targeta Valor ConsignaXavi RedondoОценок пока нет
- Simbologia NeumaticaДокумент5 страницSimbologia NeumaticaXavi Redondo100% (1)
- Presentacion de Frio IndustrialДокумент28 страницPresentacion de Frio IndustrialXavi RedondoОценок пока нет
- Mantenimiento de Instalaciones Frigoríficas Industriales Tema7Документ16 страницMantenimiento de Instalaciones Frigoríficas Industriales Tema7Xavi RedondoОценок пока нет
- Puesta en Servicio de Instalaciones Frigoríficas IndustrialesДокумент27 страницPuesta en Servicio de Instalaciones Frigoríficas IndustrialesXavi RedondoОценок пока нет
- Cuestionario SevimarДокумент9 страницCuestionario SevimarXavi RedondoОценок пока нет
- Trabajo Practicas de Embarque SOROLLAДокумент84 страницыTrabajo Practicas de Embarque SOROLLAXavi RedondoОценок пока нет
- Fag Catalogo Aplicações Rolamentos e Componentes para Motocicletas 2017 - 2018Документ50 страницFag Catalogo Aplicações Rolamentos e Componentes para Motocicletas 2017 - 2018LEODECIO BELO DE OLIVEIRAОценок пока нет
- Daewoo Nubira 1999Документ3 страницыDaewoo Nubira 1999Williams Medina100% (3)
- Proyecto Dobladora CompletoДокумент23 страницыProyecto Dobladora CompletoJosé R. M. Zurita SamanaОценок пока нет
- Que Es Cilindrada o CilindrajeДокумент2 страницыQue Es Cilindrada o CilindrajeAngel Ortega0% (2)
- CINEMÁTICAДокумент25 страницCINEMÁTICAIvanNerioОценок пока нет
- RectificadoДокумент21 страницаRectificadoBryanОценок пока нет
- Informe Estática N2Документ13 страницInforme Estática N2Joel CernaОценок пока нет
- Sd3 RP de CalculoДокумент22 страницыSd3 RP de CalculoNaomi MartinezОценок пока нет
- Velocidad Angular y Leyes de NewtonДокумент5 страницVelocidad Angular y Leyes de NewtonAria LiiddellОценок пока нет
- Reporte de EjercicioДокумент8 страницReporte de EjercicioJuan Manuel Martinez DominguezОценок пока нет
- Capítulo 06 Torsión PDFДокумент62 страницыCapítulo 06 Torsión PDFjoel100% (1)
- Guia Fisca IiДокумент11 страницGuia Fisca IiBryan CardonaОценок пока нет
- Inspección Preoperacional MotoДокумент2 страницыInspección Preoperacional Motoedsonyyk100% (2)
- Tubos Cuadrados y Rectangulares A500 PDFДокумент1 страницаTubos Cuadrados y Rectangulares A500 PDFElvis Lionel FLORES ROCAОценок пока нет
- Métodos de Producción-NodosДокумент11 страницMétodos de Producción-NodosIsaBela IPОценок пока нет
- Actividad Entregable #1Документ7 страницActividad Entregable #1Edy Corahua HuacchaОценок пока нет
- Diagra P&id InstrumentacionДокумент1 страницаDiagra P&id InstrumentacionSoleMezaОценок пока нет
- Ejercicios Resueltos de Motores Termicos..Документ17 страницEjercicios Resueltos de Motores Termicos..Edinson TrujilloОценок пока нет
- Física 1-Ejercicios N°4-2022-IIДокумент4 страницыFísica 1-Ejercicios N°4-2022-IIAlexandra RicraОценок пока нет
- Memoria Calculo Muros de Contencion Jr. PorvenirДокумент11 страницMemoria Calculo Muros de Contencion Jr. PorvenirJose Luis Maravi CastilloОценок пока нет
- 4 Flotación y Estabilidad PDFДокумент16 страниц4 Flotación y Estabilidad PDFjuan pablo suaОценок пока нет
- Tabla AleacionesДокумент6 страницTabla AleacionesgcelishОценок пока нет
- Dibujo Polea - Búsqueda de GoogleДокумент1 страницаDibujo Polea - Búsqueda de Googlepgq2vjc4qkОценок пока нет
- Ficha Tecnica Generador de VaporДокумент1 страницаFicha Tecnica Generador de VaporAlexis Jara100% (1)
- Practica #7 Equilibrio RelativoДокумент13 страницPractica #7 Equilibrio RelativoJonathan CarlinОценок пока нет
- Serie2 - 2018 Unidad 3Документ7 страницSerie2 - 2018 Unidad 3Bautista BruzzoОценок пока нет
- Compresores Centrifugo InfografiaДокумент2 страницыCompresores Centrifugo InfografiaNatalia Gutierrez HuertaОценок пока нет
- Manual Bomba Autocebante Eje Libre V.e.10 11Документ12 страницManual Bomba Autocebante Eje Libre V.e.10 11MaríaFernandaRivadeneyraОценок пока нет
- Como Comprobar BimasaДокумент12 страницComo Comprobar BimasaMikel EsponjaОценок пока нет