Вам также может понравиться
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- High-Efficiency Pure Sine Wave Inverter PDFДокумент123 страницыHigh-Efficiency Pure Sine Wave Inverter PDFMaximilian SylvesterОценок пока нет
- Aluminum Electrolytic Capacitors V Surface Mount TypeДокумент12 страницAluminum Electrolytic Capacitors V Surface Mount Typeကျော် စံဟိန်းОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Manual Denon Avr-2700 EnglishДокумент22 страницыManual Denon Avr-2700 EnglishGlasswalkerny0% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 49 (Page 485-500)Документ16 страниц49 (Page 485-500)Yassine RabhiОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Types of FuseДокумент10 страницTypes of FuseRane SiddeshОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Solar Battery Charger BestДокумент40 страницSolar Battery Charger BestAshok ChaurasiaОценок пока нет
- JBL T450BT Extra Bass Bluetooth Headset: TL0400-LK0099436Документ1 страницаJBL T450BT Extra Bass Bluetooth Headset: TL0400-LK0099436Arbaz khanОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- 2021 Price ListДокумент114 страниц2021 Price ListHelices CostaОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- AS AS Solutions AS: HCI 434D/444D - Winding 311Документ9 страницAS AS Solutions AS: HCI 434D/444D - Winding 311Renzo zuñiga ahonОценок пока нет
- Block Diagram: Bridge RectifierДокумент6 страницBlock Diagram: Bridge Rectifierskull hertzОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Xxgpu65-16 16-TV VДокумент1 страницаXxgpu65-16 16-TV VИмяОценок пока нет
- PP UNIT 4 PVD CVD EditedДокумент51 страницаPP UNIT 4 PVD CVD EditedRAHUL RAJОценок пока нет
- Temperature GuideДокумент40 страницTemperature GuideLocura AutomáticaОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Digital Microwave Communication Principles (Final Version)Документ113 страницDigital Microwave Communication Principles (Final Version)ПашаЖирухаОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- 8.TOA Public Address System For TIM GBB & SENI 2021Документ18 страниц8.TOA Public Address System For TIM GBB & SENI 2021Adli Yaumil HakimОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- APT-VEYRON E 8KW-manualДокумент81 страницаAPT-VEYRON E 8KW-manualUsama Ghafoor100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- FMCTI ePRV Brochure 0Документ2 страницыFMCTI ePRV Brochure 0Julio Cesar Narvaez LaraОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- JST138 JiejieДокумент6 страницJST138 JiejieRodrigo Montero GozálezОценок пока нет
- 2.4Ghz To 2.5Ghz 802.11G/B RF Transceivers With Integrated PaДокумент34 страницы2.4Ghz To 2.5Ghz 802.11G/B RF Transceivers With Integrated Pawrite2arshad_mОценок пока нет
- Desigo Fire Safety Modular Planning PosterДокумент2 страницыDesigo Fire Safety Modular Planning Posterfazil yoosufОценок пока нет
- c2000 Series PDFДокумент630 страницc2000 Series PDFEDUARDOОценок пока нет
- Color Making and Mixing Process Using PLCДокумент5 страницColor Making and Mixing Process Using PLCmubashirОценок пока нет
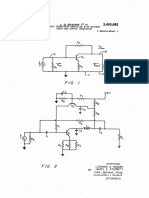
- Feb. 3, 1970 L. D. Seader Et Al 3,493,882: A/G 2 Leonard D. Seader by James E. SterrettДокумент4 страницыFeb. 3, 1970 L. D. Seader Et Al 3,493,882: A/G 2 Leonard D. Seader by James E. Sterrettefremofe7394Оценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Eaton Fire Addressable Rack Unit r6000 Manual Pr200!04!575 01Документ109 страницEaton Fire Addressable Rack Unit r6000 Manual Pr200!04!575 01Zoumana KaridioulaОценок пока нет
- DEM 4 P Water Level Indicator Using A MicrocontrollerДокумент10 страницDEM 4 P Water Level Indicator Using A MicrocontrollerPankaj YedeОценок пока нет
- Lesson Plan Brighter BulbsДокумент1 страницаLesson Plan Brighter BulbsJoanneОценок пока нет
- Combivert: GB Instruction Manual Housing EДокумент42 страницыCombivert: GB Instruction Manual Housing EMr.K chОценок пока нет
- MP430 Submittal With ATS (Large HP)Документ11 страницMP430 Submittal With ATS (Large HP)MohamedHussein MohamedHusseinОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- 039 Cid 0171 Fmi 04 - 083834Документ3 страницы039 Cid 0171 Fmi 04 - 083834Juan LopezОценок пока нет
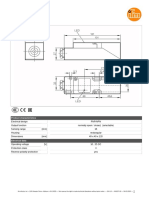
- IM5037 Inductive Sensor SpecsДокумент3 страницыIM5037 Inductive Sensor SpecstorrieistegОценок пока нет