Вам также может понравиться
- Tarima Cajas Pequeñas PDFДокумент19 страницTarima Cajas Pequeñas PDFJavier GuerreroОценок пока нет
- 1785-rm005 - Es-P (Conexión de Procesadores PLC-5 y Procesadores SLC en Una Red DH+)Документ14 страниц1785-rm005 - Es-P (Conexión de Procesadores PLC-5 y Procesadores SLC en Una Red DH+)Arturo MedinaОценок пока нет
- Curso Corsa CompletoДокумент140 страницCurso Corsa CompletoHéctorHernándezDíaz100% (14)
- Agua VaporДокумент1 страницаAgua VaporJossi Perez AОценок пока нет
- PaletsДокумент9 страницPaletsOscar NevaresОценок пока нет
- Emulador PLC Allen BradleyДокумент11 страницEmulador PLC Allen BradleyDaniel Leonardo Palomino CamaОценок пока нет
- 1769 L32E Compact LogixДокумент154 страницы1769 L32E Compact LogixVladimir FrizОценок пока нет
- Algoritmos ProgramacionДокумент96 страницAlgoritmos Programacionvalita23Оценок пока нет
- Cuadernillo de ActividadesДокумент24 страницыCuadernillo de ActividadesAguirre Castillo Jose de JesusОценок пока нет
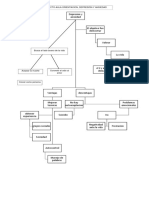
- Proyecto Aula de OrientacionДокумент1 страницаProyecto Aula de OrientacionAguirre Castillo Jose de JesusОценок пока нет
- SoftLogix 5800Документ8 страницSoftLogix 5800Aguirre Castillo Jose de JesusОценок пока нет
- MotoresДокумент1 страницаMotoresAguirre Castillo Jose de JesusОценок пока нет
- NORMA IEC61131 Programación PLCДокумент18 страницNORMA IEC61131 Programación PLCMiguel Ángel Ramírez EfigenioОценок пока нет
- Abrir Puertos Hg532e PDFДокумент4 страницыAbrir Puertos Hg532e PDFjegogupnОценок пока нет
- Tablas de RoscasДокумент23 страницыTablas de RoscasJunior Balabarca100% (1)
- Manual IntouchДокумент70 страницManual IntouchXsend100% (2)
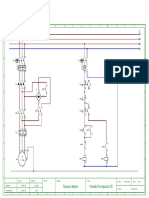
- Frenado CDДокумент1 страницаFrenado CDAguirre Castillo Jose de JesusОценок пока нет
- Manual Logo 230 RCДокумент322 страницыManual Logo 230 RCBrucearturo100% (2)
- Mini Robotic AДокумент75 страницMini Robotic Apata salada100% (3)
- Frenado CDДокумент1 страницаFrenado CDAguirre Castillo Jose de JesusОценок пока нет
- As 53346 LR-Z C 613228 MX 1046-4 PDFДокумент18 страницAs 53346 LR-Z C 613228 MX 1046-4 PDFAguirre Castillo Jose de JesusОценок пока нет
- As 53346 LR-Z C 613228 MX 1046-4Документ20 страницAs 53346 LR-Z C 613228 MX 1046-4Aguirre Castillo Jose de JesusОценок пока нет
- RsLogix500 PDFДокумент35 страницRsLogix500 PDFGerardo A. Navarrete100% (7)
- Formato y Cajetin de DibujoДокумент6 страницFormato y Cajetin de DibujoAguirre Castillo Jose de JesusОценок пока нет
- Ar Matron Manual 1Документ4 страницыAr Matron Manual 1Aguirre Castillo Jose de JesusОценок пока нет
- Manual de Programador PowerFlex755Документ530 страницManual de Programador PowerFlex755efebay100% (3)
- Implementacion Del Software MP8 PDFДокумент148 страницImplementacion Del Software MP8 PDFAguirre Castillo Jose de JesusОценок пока нет
- SKF MecatronicaДокумент18 страницSKF MecatronicaAguirre Castillo Jose de JesusОценок пока нет
- Ejercicios de PLCДокумент66 страницEjercicios de PLCAnonymous cGDpjzI100% (1)
- Carta Olímpica Games/paris-2024-Olympic-GamesДокумент1 страницаCarta Olímpica Games/paris-2024-Olympic-GamesJERICOОценок пока нет
- Sesion Las HeladasДокумент6 страницSesion Las HeladasSOCRATESОценок пока нет
- Juzgado Séptimo Administrativo Del Circuito SINCELEJO (Sucre) Auto InterlocutorioДокумент4 страницыJuzgado Séptimo Administrativo Del Circuito SINCELEJO (Sucre) Auto Interlocutoriosaul benitezОценок пока нет
- Tarea 2 Juan MartinezДокумент3 страницыTarea 2 Juan Martinezgeury33% (3)
- Homilia Tortolo Padre PíoДокумент4 страницыHomilia Tortolo Padre Píoandes88Оценок пока нет
- Agenda Semanal - 2021Документ200 страницAgenda Semanal - 2021Nadia Soledad GuffantiОценок пока нет
- Cómo Elaborar Una Disertación FilosóficaДокумент4 страницыCómo Elaborar Una Disertación FilosóficaErikson LázaroОценок пока нет
- Folleto SimposioДокумент48 страницFolleto SimposioSantiago SalamancaОценок пока нет
- Proyecto de Panaderia de CuñapeДокумент37 страницProyecto de Panaderia de CuñapeErick Gutierrez Cuellar93% (14)
- Resumen Integrador - Teoría ConstitucionalДокумент10 страницResumen Integrador - Teoría ConstitucionalCejas María FlorenciaОценок пока нет
- 06 Norma Medero Hernandez Nubia Hernandez Medero La Practica Artistica en Sus Logicas Comunicativas Desde Una Perspectiva CriticaДокумент10 страниц06 Norma Medero Hernandez Nubia Hernandez Medero La Practica Artistica en Sus Logicas Comunicativas Desde Una Perspectiva CriticaEmilianoLlanes100% (1)
- Juan y Los Frijoles MágicosДокумент2 страницыJuan y Los Frijoles MágicosJuan IgnacioОценок пока нет
- Comuna 4Документ54 страницыComuna 4Martin De LeoОценок пока нет
- Caso Colibrí Universidad UruguayДокумент179 страницCaso Colibrí Universidad UruguayData DotОценок пока нет
- Patologias CongenitasДокумент10 страницPatologias CongenitasFaby LedesmaОценок пока нет
- Proyecto IntercachimboДокумент4 страницыProyecto IntercachimboAnali L. Ore IngaОценок пока нет
- Ejercicios Lengua 4º Primaria Anaya Unidad6Документ4 страницыEjercicios Lengua 4º Primaria Anaya Unidad6Daneryslove Stardoll100% (1)
- Clima Organizacional y Su Influencia en El Desempeño LaboralДокумент146 страницClima Organizacional y Su Influencia en El Desempeño LaboralMelanie Yupanqui CatacoraОценок пока нет
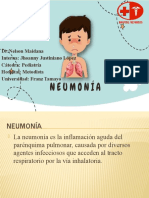
- Neumonia SДокумент25 страницNeumonia SJhoanny Justiniano LopezОценок пока нет
- Revista Suma 59Документ148 страницRevista Suma 59FernandoDiazОценок пока нет
- VidaДокумент7 страницVidaAndres GutierrezОценок пока нет
- Plan de TrabajoДокумент7 страницPlan de TrabajoadrianaОценок пока нет
- 22th Congress 01-017 Miguel Comino López Versión IIДокумент11 страниц22th Congress 01-017 Miguel Comino López Versión IIMiguel Comino LópezОценок пока нет
- Contrato de Mercancías en ConsignaciónДокумент11 страницContrato de Mercancías en Consignacióncochi2011Оценок пока нет
- Resumen Ejecutivo - Bahia El FerrolДокумент3 страницыResumen Ejecutivo - Bahia El FerrolMILAGROSCUBAОценок пока нет
- Materiales TP #6 - Yamila OsmanДокумент37 страницMateriales TP #6 - Yamila OsmanAnonymous HdENZfRОценок пока нет
- Feminicidio y FemicidioДокумент3 страницыFeminicidio y Femicidiofernando funesОценок пока нет
- 2.4. ControlДокумент4 страницы2.4. ControlFabi AyalaОценок пока нет
- Esfuércese Por Ser Modesto Como Ester0409Документ2 страницыEsfuércese Por Ser Modesto Como Ester0409FabiОценок пока нет
- ESPAÑOL FOB Switzerlabd AU 7.000MT SCO 2020 - YS-DC2 - 20201002 - 122204733 (1) .En - EsДокумент4 страницыESPAÑOL FOB Switzerlabd AU 7.000MT SCO 2020 - YS-DC2 - 20201002 - 122204733 (1) .En - EsDeivis SsahaОценок пока нет