Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 01 Real NumbersДокумент5 страниц01 Real NumbersJaveria KhanumОценок пока нет
- Mockc SL p2 2018v1Документ11 страницMockc SL p2 2018v1Ammar PasanovicОценок пока нет
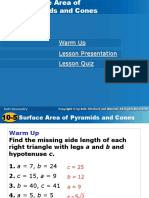
- Warm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometryДокумент34 страницыWarm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometrymdmemaОценок пока нет
- Chapter 1-3 True-False Exercises (KEY)Документ4 страницыChapter 1-3 True-False Exercises (KEY)Alp Eren AKYUZОценок пока нет
- Math ReflectionДокумент4 страницыMath ReflectionmorganashleyОценок пока нет
- 85409Документ110 страниц85409arunОценок пока нет
- Prolog Programming Exercises1Документ3 страницыProlog Programming Exercises1atmroo9Оценок пока нет
- AltitudeДокумент18 страницAltitudeMichael AlvarezОценок пока нет
- RPRTДокумент9 страницRPRTAshish PaudelОценок пока нет
- Mindspark Brochure 2011Документ16 страницMindspark Brochure 2011BindueiОценок пока нет
- Polynomial Time Reduction(s)Документ8 страницPolynomial Time Reduction(s)srinidhi paiОценок пока нет
- Ball LabДокумент3 страницыBall LabAaron LiОценок пока нет
- Poisson ProcessДокумент10 страницPoisson ProcessDaniel MwanikiОценок пока нет
- Velammal Iit and Medical Academy: Integer QuestionsДокумент6 страницVelammal Iit and Medical Academy: Integer Questionsv k (venkat da)Оценок пока нет
- CTS QUANTS 1-12 - MergedДокумент196 страницCTS QUANTS 1-12 - MergedSiva Teja RajaneniОценок пока нет
- Differential Equations (MATH313) : Equations of Order OneДокумент22 страницыDifferential Equations (MATH313) : Equations of Order OnePaul Santos NonatОценок пока нет
- General Relativity MathДокумент88 страницGeneral Relativity MathkishnitОценок пока нет
- Coursera Statistics One - Notes and FormulasДокумент48 страницCoursera Statistics One - Notes and FormulasLuisSanchezОценок пока нет
- Tws 4 CompleteДокумент2 страницыTws 4 Completeapi-213553729Оценок пока нет
- Reflection Paper On Nature of NumbersДокумент1 страницаReflection Paper On Nature of NumbersEina Delos SantosОценок пока нет
- PRIME Diagnostic Test 5 MESL Elements and Problem SolvingДокумент8 страницPRIME Diagnostic Test 5 MESL Elements and Problem SolvingFrankie NovelaОценок пока нет
- Discriminant AnalysisДокумент6 страницDiscriminant AnalysisKARTHIKEYAN P 1727716Оценок пока нет
- 18ed62 - Geometric ModellingДокумент2 страницы18ed62 - Geometric Modellingkb210538Оценок пока нет
- The Scalar Product: Engineering Application 7.6Документ12 страницThe Scalar Product: Engineering Application 7.6Pubg MobileОценок пока нет
- Spatial Mechanisms Lecture NotesДокумент77 страницSpatial Mechanisms Lecture NotesErico Eric100% (1)
- Homework 8Документ28 страницHomework 8Leo ChungОценок пока нет
- Solomon - Negative NRG in QEDДокумент9 страницSolomon - Negative NRG in QEDHomers SimpsonОценок пока нет
- Do Historians Endorse Unguru PolarityДокумент37 страницDo Historians Endorse Unguru PolarityHumberto ClímacoОценок пока нет
- CHAPTER 4 (Logic)Документ3 страницыCHAPTER 4 (Logic)Marjorie GalutОценок пока нет
- Wise Pls PropertiesДокумент51 страницаWise Pls PropertiesSatriani Ni WayanОценок пока нет