Вам также может понравиться
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987От EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonОценок пока нет
- Technical Data: Thread Specification - ORFS (SAE J1453)Документ1 страницаTechnical Data: Thread Specification - ORFS (SAE J1453)Matei SilviuОценок пока нет
- An Investigation On The Weldability of Grey Cast Iron Using Nickel Filler MetalДокумент5 страницAn Investigation On The Weldability of Grey Cast Iron Using Nickel Filler MetalKhin Aung ShweОценок пока нет
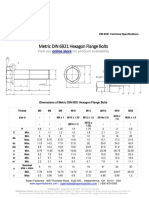
- Metric DIN 6921 Hexagon Flange Bolts: Visit Our For Product AvailabilityДокумент5 страницMetric DIN 6921 Hexagon Flange Bolts: Visit Our For Product AvailabilityJaganОценок пока нет
- EN 13183-1-2002 - enДокумент8 страницEN 13183-1-2002 - enAdel A. AbdelazizОценок пока нет
- Unspecified Tolerances Plastic Parts: 1. ObjectДокумент7 страницUnspecified Tolerances Plastic Parts: 1. ObjectDiegoОценок пока нет
- 2370 Ed1 ENДокумент5 страниц2370 Ed1 ENanhthoОценок пока нет
- Din 7991Документ5 страницDin 7991mohamadreza bagheriОценок пока нет
- ASTM F593: MaterialsДокумент1 страницаASTM F593: MaterialsBilly DОценок пока нет
- SP1Документ25 страницSP1mugu12Оценок пока нет
- Alloy-Steel and Stainless Steel Bolting For Low-Temperature ServiceДокумент8 страницAlloy-Steel and Stainless Steel Bolting For Low-Temperature ServiceGian SennaОценок пока нет
- Din en 1172 e 2010-07Документ16 страницDin en 1172 e 2010-07Niko Zurabishvili100% (1)
- Iso 683-2-2016 2Документ7 страницIso 683-2-2016 2Saju ShajuОценок пока нет
- Springwire Xinhua 2006Документ10 страницSpringwire Xinhua 2006teban09Оценок пока нет
- BS en 12540-2000 - Corrosion Protection of MetalДокумент26 страницBS en 12540-2000 - Corrosion Protection of MetalEdy WijayaОценок пока нет
- Iso AnnealingДокумент2 страницыIso AnnealingPurushottam Sutar100% (1)
- En 10139Документ2 страницыEn 10139releone11Оценок пока нет
- Is 1862Документ4 страницыIs 1862mangesh sandavОценок пока нет
- SAE J413 InglesДокумент6 страницSAE J413 IngleswebmakerproОценок пока нет
- FiatДокумент10 страницFiatrgi178100% (1)
- Maleable Cast IronsДокумент0 страницMaleable Cast IronsGilang Miky Pratama AlwianОценок пока нет
- NES-M2032 - 2021 - (ColdRoll-High Tensile)Документ13 страницNES-M2032 - 2021 - (ColdRoll-High Tensile)dpfloresОценок пока нет
- BS en 16079-2011Документ34 страницыBS en 16079-2011laythОценок пока нет
- Lss-A286 Astm A453 PDFДокумент2 страницыLss-A286 Astm A453 PDFmazolasboОценок пока нет
- Hot-Rolled and Cold-Finished Age-Hardening Stainless Steel Bars and ShapesДокумент8 страницHot-Rolled and Cold-Finished Age-Hardening Stainless Steel Bars and ShapesradziОценок пока нет
- DEXT 067 DIN en 10277 2 Aços para Propósitos Gerais de EngenhariaДокумент11 страницDEXT 067 DIN en 10277 2 Aços para Propósitos Gerais de EngenhariatestesadaОценок пока нет
- Iso 9809 1 2010 en PDFДокумент11 страницIso 9809 1 2010 en PDFgabrielОценок пока нет
- 4 Steel Rod Bar Wire For Cold Heading and Cold Extrusion - Del Conds Q and T SteelsДокумент22 страницы4 Steel Rod Bar Wire For Cold Heading and Cold Extrusion - Del Conds Q and T SteelsDiana MurzacОценок пока нет
- Trainguard 100 200 Onboard en PDFДокумент4 страницыTrainguard 100 200 Onboard en PDFRizki Fajar NovantoОценок пока нет
- E1009Документ4 страницыE1009sumedh11septОценок пока нет
- Gould Alloys Limited - Copper and Copper Alloys DEF STAN 02 838 NES838 Bar - 243Документ2 страницыGould Alloys Limited - Copper and Copper Alloys DEF STAN 02 838 NES838 Bar - 243Gourav SharmaОценок пока нет
- Strain Hardening Exponent - Wikipedia, The Free EncyclopediaДокумент1 страницаStrain Hardening Exponent - Wikipedia, The Free Encyclopediadr_kh_ahmedОценок пока нет
- 2.3. ISO4892.3-2006紫外线测试英文版Документ24 страницы2.3. ISO4892.3-2006紫外线测试英文版Khin Khin Thaw100% (1)
- Weld Acceptance Criteria and Repair Procedures Drawn-Arc Welded Automotive Studs, Nuts and Brackets - SteelДокумент8 страницWeld Acceptance Criteria and Repair Procedures Drawn-Arc Welded Automotive Studs, Nuts and Brackets - SteelMuhammad AliОценок пока нет
- AMS2745AДокумент6 страницAMS2745AmarcinОценок пока нет
- EN ISO 15792-1 (2008) A1 (2011) (E) CodifiedДокумент3 страницыEN ISO 15792-1 (2008) A1 (2011) (E) CodifiedQuality Team50% (2)
- European Standard Norme Europeenne Europaische Norm: Ultrasonic Testing of $teel BarsДокумент13 страницEuropean Standard Norme Europeenne Europaische Norm: Ultrasonic Testing of $teel BarspraveenОценок пока нет
- Hes B008-03 Hexagon NutsДокумент5 страницHes B008-03 Hexagon NutsPreetam KumarОценок пока нет
- Din71802 PDFДокумент2 страницыDin71802 PDFjudas1432Оценок пока нет
- Disclosure To Promote The Right To InformationДокумент34 страницыDisclosure To Promote The Right To InformationSainath AmudaОценок пока нет
- Conical Seat Spherical Washer Is 4297Документ6 страницConical Seat Spherical Washer Is 4297Rajasekaran Murugan0% (1)
- BS en Iso 945 Part 3Документ52 страницыBS en Iso 945 Part 3vkkt2016Оценок пока нет
- Iso 3452-5 - 2008Документ12 страницIso 3452-5 - 2008jesonelite100% (1)
- RJR PMMTДокумент16 страницRJR PMMTArun PrasadОценок пока нет
- DZR BrassДокумент3 страницыDZR BrassAlfredo Cumbi CumbiОценок пока нет
- International Standard: Stainless Steels For Springs - WireДокумент8 страницInternational Standard: Stainless Steels For Springs - WireAfzal ImamОценок пока нет
- Sist en 1976 2014Документ11 страницSist en 1976 2014Ryadh RyadhОценок пока нет
- EN 13183-2-2002 - enДокумент10 страницEN 13183-2-2002 - enAdel A. AbdelazizОценок пока нет
- Hexagon Head Screws With Metric Fine Pitch Thread - Product Grades Aandb (First Revision)Документ15 страницHexagon Head Screws With Metric Fine Pitch Thread - Product Grades Aandb (First Revision)kumar QAОценок пока нет
- Astm A47-99Документ5 страницAstm A47-99romerobernaОценок пока нет
- Iso 8407 2021Документ9 страницIso 8407 2021Mohamed HegazyОценок пока нет
- 20 MN V6Документ1 страница20 MN V6g_sanchetiОценок пока нет
- Chapter 2 Material 2014 PDFДокумент363 страницыChapter 2 Material 2014 PDFGOPINATH KRISHNAN NAIRОценок пока нет
- 16MnCr5 1.7131 16MnCrS5 1.7139 RM16 ENGДокумент2 страницы16MnCr5 1.7131 16MnCrS5 1.7139 RM16 ENGJerzy RistujczinОценок пока нет
- DIN580 Eye BoltДокумент7 страницDIN580 Eye BoltReda El-AwadyОценок пока нет
- Ford-WSS-M1A365-A11A23 - (2017-09) - (Steel-CR-HR-Low Carbon) 9pgДокумент9 страницFord-WSS-M1A365-A11A23 - (2017-09) - (Steel-CR-HR-Low Carbon) 9pgdpfloresОценок пока нет
- 98704025203Документ16 страниц98704025203Ajeeth Kumar0% (1)
- ISO-15792-1-2000. Test Vật Liệu HànДокумент9 страницISO-15792-1-2000. Test Vật Liệu HànLã Hải ĐăngОценок пока нет
- M 3031 (2013-06)Документ16 страницM 3031 (2013-06)Hatada FelipeОценок пока нет
- Corrosion Science: Yiming Jiang, Hua Tan, Zhiyu Wang, Jufeng Hong, Laizhu Jiang, Jin LiДокумент8 страницCorrosion Science: Yiming Jiang, Hua Tan, Zhiyu Wang, Jufeng Hong, Laizhu Jiang, Jin Lipepe martinez100% (1)
- Statistical Analysis of HDPE Fatigue LifetimeДокумент11 страницStatistical Analysis of HDPE Fatigue Lifetimearmando238Оценок пока нет
- Service Parts Lists Xciting R 300i MMC - SB60BA PDFДокумент148 страницService Parts Lists Xciting R 300i MMC - SB60BA PDFarmando238Оценок пока нет
- Analysis AssemblyДокумент81 страницаAnalysis AssemblyXavier Douet100% (1)
- Siti Per Imparare L'ingleseДокумент2 страницыSiti Per Imparare L'inglesearmando238Оценок пока нет
- Magnetic & Gyro CompassДокумент19 страницMagnetic & Gyro CompassIbrahem Al-Khawaja100% (1)
- Introduction To Boundary LayerДокумент14 страницIntroduction To Boundary LayerAyman KeirОценок пока нет
- PHY101 DrYahya?Документ32 страницыPHY101 DrYahya?Abdulsamad OyetunjiОценок пока нет
- Free Downloads FileДокумент5 страницFree Downloads FileJoJa JoJaОценок пока нет
- Summer 2020 Dr. Hidir Maral Department of Mechanical EngineeringДокумент36 страницSummer 2020 Dr. Hidir Maral Department of Mechanical EngineeringRıza ÜnalОценок пока нет
- Introduction To Robotics Mechanics and Control 4th Edition Craig Solution ManualДокумент6 страницIntroduction To Robotics Mechanics and Control 4th Edition Craig Solution Manualrichard96% (26)
- EasbДокумент370 страницEasbSayyadh Rahamath BabaОценок пока нет
- WWW - Ib.academy: Study GuideДокумент92 страницыWWW - Ib.academy: Study GuideHendrikEspinozaLoyolaОценок пока нет
- Slab Punching Shear SpreadsheetДокумент8 страницSlab Punching Shear SpreadsheetRaju ShresthaОценок пока нет
- Me2204 Unit Wise QuestionsДокумент18 страницMe2204 Unit Wise QuestionsMohanraj Subramani0% (1)
- Annexure-4 - Design of Anchor Bolt-Case-I Max MomentДокумент5 страницAnnexure-4 - Design of Anchor Bolt-Case-I Max MomentARUNKUMAR KОценок пока нет
- C24 BTTS-9 PhysicsДокумент19 страницC24 BTTS-9 Physicshello2006aditankОценок пока нет
- Angular Projectile MotionДокумент16 страницAngular Projectile MotionwscienceОценок пока нет
- Velocity AnalysisДокумент12 страницVelocity Analysisniaz kilamОценок пока нет
- 861 Physics - Isc SpecimenДокумент17 страниц861 Physics - Isc SpecimenadityaОценок пока нет
- 6-3 Applyingnewtonslaws SsДокумент2 страницы6-3 Applyingnewtonslaws SsTashaОценок пока нет
- NotesДокумент40 страницNotesnirmala_siva_1100% (1)
- 2 1condenserДокумент9 страниц2 1condenserAhmed GadОценок пока нет
- Discharge Equation of A Circular Sharp Crested OrificeДокумент3 страницыDischarge Equation of A Circular Sharp Crested OrificeAnonymous CDeUIcnqОценок пока нет
- (Ex 2) Center of Pressure On A Plane SurfaceДокумент7 страниц(Ex 2) Center of Pressure On A Plane SurfaceMohammed MigdadyОценок пока нет
- Fundamental of Statistical Mechanics BB-laud PDFДокумент286 страницFundamental of Statistical Mechanics BB-laud PDFajay kumar25% (4)
- Unit - IVДокумент54 страницыUnit - IVsiva kumarОценок пока нет
- Kinematics 9702 Questions - 3Документ1 страницаKinematics 9702 Questions - 3Zeeshan AhmedОценок пока нет
- 046Документ9 страниц046Clayton RobersonОценок пока нет
- NSK TrustДокумент138 страницNSK TrustoktovaОценок пока нет
- Mechanics of Materials Lecture Notes PDFДокумент130 страницMechanics of Materials Lecture Notes PDFNaveed HassanОценок пока нет
- Chapter 9 - Force and Laws of Motion Revision Notes PDFДокумент13 страницChapter 9 - Force and Laws of Motion Revision Notes PDFAbhishekОценок пока нет
- Hancock's NotesДокумент104 страницыHancock's Noteschernl2004Оценок пока нет
- Ch10 صور 5 8waste WaterДокумент4 страницыCh10 صور 5 8waste WaterAljebre MohmedОценок пока нет
- ANSYS Explicit Dynamics Analysis GuideДокумент256 страницANSYS Explicit Dynamics Analysis GuideSuri Kens Michua83% (6)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!От EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Рейтинг: 4 из 5 звезд4/5 (3)
- Artificial Intelligence: From Medieval Robots to Neural NetworksОт EverandArtificial Intelligence: From Medieval Robots to Neural NetworksРейтинг: 4 из 5 звезд4/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityОт EverandDark Aeon: Transhumanism and the War Against HumanityРейтинг: 5 из 5 звезд5/5 (1)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.От EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Рейтинг: 4 из 5 звезд4/5 (5)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureОт EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityОт EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsОт EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsРейтинг: 5 из 5 звезд5/5 (3)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОт EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОценок пока нет
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionОт EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionРейтинг: 3.5 из 5 звезд3.5/5 (129)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!От EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Рейтинг: 3 из 5 звезд3/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessОт EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessОценок пока нет
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceОт EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (9)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationОт EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Create Profitable Side Hustles with Artificial IntelligenceОт EverandCreate Profitable Side Hustles with Artificial IntelligenceОценок пока нет
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesОт EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesРейтинг: 2.5 из 5 звезд2.5/5 (3)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkОт EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkРейтинг: 5 из 5 звезд5/5 (1)
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- Robotics: Designing the Mechanisms for Automated MachineryОт EverandRobotics: Designing the Mechanisms for Automated MachineryРейтинг: 4.5 из 5 звезд4.5/5 (8)