Вам также может понравиться
- Validitas Dan Reabilitas Soal Pengetahuan Reliability Scale: All Variables Case Processing SummaryДокумент14 страницValiditas Dan Reabilitas Soal Pengetahuan Reliability Scale: All Variables Case Processing SummaryEva Octariani 'Aprianto'Оценок пока нет
- 4 Marcet BoilersДокумент4 страницы4 Marcet BoilersNashit AhmedОценок пока нет
- Zinc CuSO ExperimentДокумент3 страницыZinc CuSO Experimentgeorgemarkoul100Оценок пока нет
- 2LM1 Milan Ma YsabellaДокумент4 страницы2LM1 Milan Ma YsabellaBella AdrianaОценок пока нет
- Steam Temperature Pressure TableДокумент1 страницаSteam Temperature Pressure TableZaid RehmanОценок пока нет
- How To Score Practice Test 1Документ2 страницыHow To Score Practice Test 1Avtarika KaurОценок пока нет
- Torsion TestДокумент7 страницTorsion TestAmmar AlaufiОценок пока нет
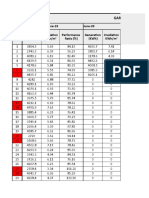
- June-19 June-20 Generation (KWH) Irrediation KWH/M Performance Ratio (%) Generation (KWH) Irrediation KWH/MДокумент10 страницJune-19 June-20 Generation (KWH) Irrediation KWH/M Performance Ratio (%) Generation (KWH) Irrediation KWH/M1382aceОценок пока нет
- Nozzle Projection 1615Документ6 страницNozzle Projection 1615Guru MoorthiОценок пока нет
- Report 2Документ13 страницReport 2sahilbarbade.ee101Оценок пока нет
- PSAT/NMSQT Practice Test #1: Worksheets: Raw Score Conversion Table 1Документ2 страницыPSAT/NMSQT Practice Test #1: Worksheets: Raw Score Conversion Table 1api-395493982Оценок пока нет
- Scoring Psat NMSQT Practice Test 1 7 8Документ2 страницыScoring Psat NMSQT Practice Test 1 7 8api-395493982Оценок пока нет
- SAT II Score Conversion TableДокумент5 страницSAT II Score Conversion TableMishal Fatima0% (1)
- 15-AB CLVRT 9Документ2 страницы15-AB CLVRT 9salimcivil12Оценок пока нет
- Stability of Floating Bodies 1Документ7 страницStability of Floating Bodies 1Kimkate GeronimoОценок пока нет
- Date June-19 June-20 Generation (KWH) Irrediation KWH/M Performance Ratio (%) Generation (KWH) Irrediation KWH/MДокумент10 страницDate June-19 June-20 Generation (KWH) Irrediation KWH/M Performance Ratio (%) Generation (KWH) Irrediation KWH/M1382aceОценок пока нет
- Valves and Fittings Losses in Equivalent Feet of Pipe: Y-StrainerДокумент3 страницыValves and Fittings Losses in Equivalent Feet of Pipe: Y-Strainerthilina lakhithaОценок пока нет
- Caracteristicas Tecnicas Dos Motores 04-2010Документ2 страницыCaracteristicas Tecnicas Dos Motores 04-2010tiagosubtil7422Оценок пока нет
- PSV Position vs Temperature Controller OutputДокумент42 страницыPSV Position vs Temperature Controller OutputSri WahyuniОценок пока нет
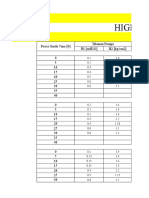
- High SpeedДокумент13 страницHigh SpeeddimasОценок пока нет
- Auxiliar - AbsorberДокумент5 страницAuxiliar - AbsorberVinicius NoronhaОценок пока нет
- Specifikacija Armature Za TemeljeДокумент5 страницSpecifikacija Armature Za TemeljeĐorđe StojanovskiОценок пока нет
- Laboratorio 3 ExcelДокумент9 страницLaboratorio 3 ExcelJhoel Elias Zela MontenegroОценок пока нет
- Chem Displacement LabДокумент18 страницChem Displacement LabHEHEHEОценок пока нет
- QTDM SessionДокумент11 страницQTDM SessionAmlan PandaОценок пока нет
- Cronbach's alpha reliability statistics for 40-item scaleДокумент3 страницыCronbach's alpha reliability statistics for 40-item scaleEky AlfiansyayОценок пока нет
- Direct Shear TestДокумент11 страницDirect Shear Testsahilbarbade.ee101Оценок пока нет
- BUU BBA 1 Accounting-2014Документ3 страницыBUU BBA 1 Accounting-2014lion kingОценок пока нет
- Inbound 8553023723101019436Документ10 страницInbound 8553023723101019436Dimbiniaina FanomezantsoaОценок пока нет
- Reliability Statistics Valid SemuaДокумент3 страницыReliability Statistics Valid SemuaLikinParkОценок пока нет
- Sedimentation GraphДокумент7 страницSedimentation GraphfavourimamОценок пока нет
- Rata-Rata Standar 4800 4800 4800 4800 4800 4800 4800 4800 29.4 4800 4800Документ3 страницыRata-Rata Standar 4800 4800 4800 4800 4800 4800 4800 4800 29.4 4800 4800fadzriОценок пока нет
- Pre-Dimensionamento de SapatasДокумент9 страницPre-Dimensionamento de SapatasThiagoОценок пока нет
- 12FLB200PДокумент1 страница12FLB200PBurim TolajОценок пока нет
- EMI Calculator AssetYogiДокумент23 страницыEMI Calculator AssetYogilikapa3212Оценок пока нет
- Machining Data Analysis of Spindle Speed, Feed Rate and Depth of CutДокумент3 страницыMachining Data Analysis of Spindle Speed, Feed Rate and Depth of CutMohsin Iqbal QaziОценок пока нет
- EMI CalculatorsДокумент23 страницыEMI Calculatorslikapa3212Оценок пока нет
- Examen A.1Документ3 страницыExamen A.1SegundoLeivaОценок пока нет
- Practice #9: Pumps in Series and in Parallel: Hydraulics Lab Professor: Jose Manuel Molano MartínezДокумент12 страницPractice #9: Pumps in Series and in Parallel: Hydraulics Lab Professor: Jose Manuel Molano MartínezMikeОценок пока нет
- Division 2 Collections SheetДокумент35 страницDivision 2 Collections SheetCarlos QuezadaОценок пока нет
- Asig 3 TDCДокумент2 страницыAsig 3 TDCDavid BaulesОценок пока нет
- Captiva - Engine Controls and Fuel - 2.4LДокумент177 страницCaptiva - Engine Controls and Fuel - 2.4Lhskv20025525100% (1)
- GL 110 Cam and Follower Apparatus operating instructionsДокумент20 страницGL 110 Cam and Follower Apparatus operating instructionsAurangzebОценок пока нет
- Practical 1 Data Entry and Coding (Muhammad Faiz 211517)Документ6 страницPractical 1 Data Entry and Coding (Muhammad Faiz 211517)Rani anak matОценок пока нет
- EMI CalculatorДокумент23 страницыEMI CalculatorkingloloОценок пока нет
- Experiment 10: Absorption of Beta and Gamma Rays: PurposeДокумент9 страницExperiment 10: Absorption of Beta and Gamma Rays: PurposeRobert Carrillo0% (1)
- 2008 - Temperature Dependence of Surface Tension of WaterДокумент4 страницы2008 - Temperature Dependence of Surface Tension of WaterandreОценок пока нет
- Betz Limit CalculationДокумент2 страницыBetz Limit CalculationShyam SundarОценок пока нет
- Hidrología - Ing. Ricardo Adrián Márquez DuranДокумент7 страницHidrología - Ing. Ricardo Adrián Márquez DuranDaniel Vidal CamachoОценок пока нет
- Jacketed VesselДокумент2 страницыJacketed VesselSeyzhea Nimas HapsariОценок пока нет
- Low Speed 1Документ16 страницLow Speed 1dimasОценок пока нет
- Tugas Mektan 1Документ9 страницTugas Mektan 1Tendy ArrdyansyahОценок пока нет
- Hypothesis Test, Regression Analysis, Chi-square Distribution of 40 ExecutivesДокумент11 страницHypothesis Test, Regression Analysis, Chi-square Distribution of 40 ExecutivesJuan Carlos ObesoОценок пока нет
- 25 - Process ModelingДокумент9 страниц25 - Process ModelingArmel BrissyОценок пока нет
- VI. Data Pengamatan 1. Manual: Hubungan PSV Dengan F1 Hot Pump Setting: 50%Документ66 страницVI. Data Pengamatan 1. Manual: Hubungan PSV Dengan F1 Hot Pump Setting: 50%Kirana Wirr'sОценок пока нет
- Shende Sales Corporation: Volume - 3Документ4 страницыShende Sales Corporation: Volume - 3Rajendra ChoudharyОценок пока нет
- T4032on 1 52pp 22engДокумент14 страницT4032on 1 52pp 22engPragya ParmarОценок пока нет
- Punto FijoДокумент6 страницPunto FijoGian Torres RiveraОценок пока нет
- 50Hz D2SC-55X R404A: Evaporating Temperature °CДокумент2 страницы50Hz D2SC-55X R404A: Evaporating Temperature °CMechanical PowerОценок пока нет
- Laboratory Exercises in Astronomy: Solutions and AnswersОт EverandLaboratory Exercises in Astronomy: Solutions and AnswersОценок пока нет
- Stone Crusher Spare Parts Manufacturer and Supplier - VK Metal Cast & Engineering BrochureДокумент6 страницStone Crusher Spare Parts Manufacturer and Supplier - VK Metal Cast & Engineering BrochureVK Metal Cast & Engineering100% (1)
- Ship Resistance & Propulsion (Tutorial 1)Документ10 страницShip Resistance & Propulsion (Tutorial 1)Zulkarnain MustafarОценок пока нет
- NSK CAT E1102m B182-205Документ12 страницNSK CAT E1102m B182-205Jorge Perez CabanasОценок пока нет
- Chap - 15Документ50 страницChap - 15Arup Das100% (1)
- "DOL Starter": Submitted byДокумент10 страниц"DOL Starter": Submitted byKartik InamdarОценок пока нет
- Spectroxepos Xep03: Verbrauchsmaterial Und Verschleißteile Consumables and Wear PartsДокумент26 страницSpectroxepos Xep03: Verbrauchsmaterial Und Verschleißteile Consumables and Wear Partsamin adimiОценок пока нет
- Retrofit BMBS InstructionsДокумент3 страницыRetrofit BMBS InstructionsPradipta SahooОценок пока нет
- Eu 3800Документ2 страницыEu 3800Fernando MilmanОценок пока нет
- CompAir LeROI CL20-25-30SS,CUB Parts ListДокумент59 страницCompAir LeROI CL20-25-30SS,CUB Parts ListDiana Zar100% (1)
- Fisher Control Valve Sourcebook - Power and Severe ServiceДокумент220 страницFisher Control Valve Sourcebook - Power and Severe Servicemtrj59Оценок пока нет
- HP237Документ20 страницHP237Asif HameedОценок пока нет
- Turbulent Flow Exiting a Reservoir and Impacting a Solid ObjectДокумент22 страницыTurbulent Flow Exiting a Reservoir and Impacting a Solid ObjectMariaEstherAlguacilRodriguezОценок пока нет
- 9 Info and Work Sheet Service Steering System2Документ47 страниц9 Info and Work Sheet Service Steering System2DEATHSTAR GAMINGОценок пока нет
- To Study The Construction and Working of 4 - Stroke Petrol / Diesel EngineДокумент7 страницTo Study The Construction and Working of 4 - Stroke Petrol / Diesel EngineBanwari Lal PrajapatОценок пока нет
- Permanent Magnet DC MotorДокумент4 страницыPermanent Magnet DC MotorSourav Kumar100% (1)
- Appendix CДокумент3 страницыAppendix CMagin Idelfonso TorreblancaОценок пока нет
- Hydraulic Accumulator (High Pressure) - Test and Charge: Pruebas y AjustesДокумент16 страницHydraulic Accumulator (High Pressure) - Test and Charge: Pruebas y AjustesBrayan Sánchez ParedesОценок пока нет
- Characteristics Series CE, CP, C: 2 Way Slip-In Cartridge ValvesДокумент17 страницCharacteristics Series CE, CP, C: 2 Way Slip-In Cartridge Valvess_waqarОценок пока нет
- Mineral and Synthetic Lubricants SummaryДокумент6 страницMineral and Synthetic Lubricants SummaryDarmawan PutrantoОценок пока нет
- The Piping Engineering WorldДокумент4 страницыThe Piping Engineering WorldHrishikesh PatilОценок пока нет
- Shear & Diagonal Tension in BeamsДокумент15 страницShear & Diagonal Tension in BeamsS. M. ZAHIDUR RAHMAN 1301129Оценок пока нет
- Combination Tool WFTДокумент11 страницCombination Tool WFTCarlos HolguinОценок пока нет
- Fiat Ideea 1 - 3 DieselДокумент210 страницFiat Ideea 1 - 3 DieselErvin WatzlawekОценок пока нет
- Super Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsДокумент208 страницSuper Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsHuu NguyenОценок пока нет
- General Online QuestДокумент80 страницGeneral Online QuestPankaj PooniaОценок пока нет
- Eni Blasia S 220Документ2 страницыEni Blasia S 220Fajar EkoОценок пока нет
- Dehumidifcation and CoolingДокумент3 страницыDehumidifcation and CoolingWaleed A. ShreimОценок пока нет
- Science 8 q1 w3Документ12 страницScience 8 q1 w3Je-ann AcuОценок пока нет
- Questions: AnswerДокумент5 страницQuestions: AnswerMuhammad El-FahamОценок пока нет
- Small Bore Metric Seals CatalogДокумент64 страницыSmall Bore Metric Seals CatalogLeroy AraoОценок пока нет