Вам также может понравиться
- Ballbot ThesisДокумент5 страницBallbot Thesismoz1selajuk2100% (3)
- Pick and Place Robot Research PaperДокумент6 страницPick and Place Robot Research Paperc9qb8gy7100% (1)
- DIY Stair Climbing Robot: RationaleДокумент9 страницDIY Stair Climbing Robot: RationaleFAseeh MalikОценок пока нет
- Multifuntioning RobotДокумент139 страницMultifuntioning RobotshamstouhidОценок пока нет
- Pick and Place Robot Literature ReviewДокумент8 страницPick and Place Robot Literature Reviewnydohavihup2100% (1)
- Mobile Robots ThesisДокумент6 страницMobile Robots ThesisRaquel Pellicier100% (2)
- Drive Forward ReverseДокумент78 страницDrive Forward Reverseeider castellarОценок пока нет
- Design and 3D Print of An Explorer RobotДокумент11 страницDesign and 3D Print of An Explorer RobotAnonymous LO5DSEUОценок пока нет
- The MagPi Issue 6 enДокумент32 страницыThe MagPi Issue 6 enRonald Picon PeláezОценок пока нет
- Project ProposalДокумент4 страницыProject ProposalPeterR.MichaelОценок пока нет
- Robopet: A Semi-Autonomous Robot For Hazardous Inspections: Fabio T. RamosДокумент10 страницRobopet: A Semi-Autonomous Robot For Hazardous Inspections: Fabio T. RamosPraveen PepakayalaОценок пока нет
- ENPM 667 Project 1: CAD ModelingДокумент2 страницыENPM 667 Project 1: CAD ModelingGaurav RautОценок пока нет
- Industrially Defined ProblemsДокумент8 страницIndustrially Defined ProblemsPraveen SridharОценок пока нет
- Configuring Robot MovementДокумент12 страницConfiguring Robot MovementJlОценок пока нет
- Tutorial With AnswersДокумент22 страницыTutorial With Answersziyambicharles77Оценок пока нет
- Tutorial With AnswersДокумент29 страницTutorial With Answersc19138913iОценок пока нет
- 004 Zeeshan AiprДокумент26 страниц004 Zeeshan Aipr26- Amal SathyanОценок пока нет
- SDP ReportДокумент8 страницSDP ReportWaqas KhanОценок пока нет
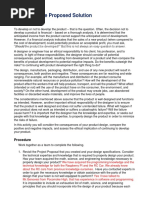
- Viability of The Proposed SolutionДокумент3 страницыViability of The Proposed Solutionapi-319659324Оценок пока нет
- Ball Balancing Robot ThesisДокумент4 страницыBall Balancing Robot Thesiskararusselldurham100% (2)
- Delta Robot ThesisДокумент5 страницDelta Robot Thesisgj9vq5z0100% (2)
- Balancing RobotДокумент5 страницBalancing RobotMilton MuñozОценок пока нет
- Robot Thesis IdeasДокумент7 страницRobot Thesis Ideasjessicamyerseugene100% (2)
- Two Wheel Self Balancing RobotДокумент25 страницTwo Wheel Self Balancing RobotAnuragОценок пока нет
- Servo Magazine - 2007-03Документ92 страницыServo Magazine - 2007-03aufk07Оценок пока нет
- Robotics Assignment 3: Question - 1Документ4 страницыRobotics Assignment 3: Question - 1Atul NarayananОценок пока нет
- 1 s2.0 S1877050918310548 MainДокумент8 страниц1 s2.0 S1877050918310548 MainAnonymous 9q5GEfm8IОценок пока нет
- Robotic Arm Thesis PDFДокумент7 страницRobotic Arm Thesis PDFNat Rice100% (2)
- AbstractДокумент22 страницыAbstractKalpanaОценок пока нет
- Proposal of Robot ThesisДокумент15 страницProposal of Robot ThesisHus Forth CorrentyОценок пока нет
- Servo 2010-05Документ84 страницыServo 2010-05frhuttonОценок пока нет
- Pick and Place Robotic Arm Literature ReviewДокумент4 страницыPick and Place Robotic Arm Literature Reviewea9k5d7j100% (1)
- Pulldownit!: Next Step in Dynamics For VFXДокумент6 страницPulldownit!: Next Step in Dynamics For VFXSatya NarayanaОценок пока нет
- How To Build A Robot at HomeДокумент37 страницHow To Build A Robot at Homesureshya22Оценок пока нет
- GoodBoy 3D Printed Arduino Robot DogДокумент22 страницыGoodBoy 3D Printed Arduino Robot DogLowell WhiteheadОценок пока нет
- How To Build A Robot SimulationДокумент26 страницHow To Build A Robot SimulationRafael SchroerОценок пока нет
- Assignment 3Документ5 страницAssignment 3api-703357393Оценок пока нет
- How To Build A Robot SimulationДокумент26 страницHow To Build A Robot SimulationbriejawiОценок пока нет
- NGENGEДокумент6 страницNGENGEJohn Errol MergalОценок пока нет
- Self Balancing Robot ProposalДокумент8 страницSelf Balancing Robot ProposalbhanuОценок пока нет
- Plagiarism Scan Report: Plagiarised UniqueДокумент2 страницыPlagiarism Scan Report: Plagiarised UniqueHardik PatoliyaОценок пока нет
- Class 3Документ91 страницаClass 3RAVI RanjanОценок пока нет
- Project Advances 1st Term: Code-BreakersДокумент10 страницProject Advances 1st Term: Code-BreakersDiana GmОценок пока нет
- Servo - February 2009 (Malestrom)Документ84 страницыServo - February 2009 (Malestrom)engineer86100% (1)
- Robotics Thesis ProjectДокумент7 страницRobotics Thesis Projectgjh9pq2a100% (1)
- What Is A SCARA RobotДокумент6 страницWhat Is A SCARA RobotDeependra TalandiОценок пока нет
- Chapter 2 SolutionДокумент4 страницыChapter 2 SolutionEngr ShabirОценок пока нет
- High-Level Robot Programming Based On CAD: Dealing With Unpredictable EnvironmentsДокумент18 страницHigh-Level Robot Programming Based On CAD: Dealing With Unpredictable EnvironmentsMihail AvramovОценок пока нет
- Project Report On Robotic ArmДокумент17 страницProject Report On Robotic ArmGina SreeОценок пока нет
- VEEGEEДокумент22 страницыVEEGEESharry JonesОценок пока нет
- Quantum Bots Engineering NotebookДокумент82 страницыQuantum Bots Engineering NotebookNivesh Programming and GamingОценок пока нет
- Robotics TutorialДокумент5 страницRobotics TutorialAbhigyan DattaОценок пока нет
- Object Tracking For Autonomous Vehicles: Project ReportДокумент10 страницObject Tracking For Autonomous Vehicles: Project ReportFIRE OC GAMINGОценок пока нет
- Robotic Shoe PolisherДокумент16 страницRobotic Shoe Polisherapi-233164756Оценок пока нет
- Ibot - Robotics Club of Iit Madras Tutorial 1.1.1 Build Your Basic BotДокумент21 страницаIbot - Robotics Club of Iit Madras Tutorial 1.1.1 Build Your Basic BotJavier Dorado SánchezОценок пока нет
- IJMET 09-01-016 With Cover Page v2Документ10 страницIJMET 09-01-016 With Cover Page v2mane prathameshОценок пока нет
- Mecanum Wheels Robot 6Документ16 страницMecanum Wheels Robot 6Sao Khon100% (1)
- Self Balancing VehicleДокумент6 страницSelf Balancing VehicleGRD JournalsОценок пока нет
- Servo 2010-02 PDFДокумент84 страницыServo 2010-02 PDFdanielsan74100% (1)
- Traps - 2008 12 30Документ15 страницTraps - 2008 12 30smoothkat5Оценок пока нет
- Marcelo H Del PilarДокумент8 страницMarcelo H Del PilarLee Antonino AtienzaОценок пока нет
- HIS Unit COMBINES Two Birthdays:: George Washington's BirthdayДокумент9 страницHIS Unit COMBINES Two Birthdays:: George Washington's BirthdayOscar Panez LizargaОценок пока нет
- Chapter 12 NotesДокумент4 страницыChapter 12 NotesIvanTh3Great100% (6)
- Talk 4Документ35 страницTalk 4haryonoismanОценок пока нет
- Jurnal Politik Dan Cinta Tanah Air Dalam Perspektif IslamДокумент9 страницJurnal Politik Dan Cinta Tanah Air Dalam Perspektif Islamalpiantoutina12Оценок пока нет
- Promising Anti Convulsant Effect of A Herbal Drug in Wistar Albino RatsДокумент6 страницPromising Anti Convulsant Effect of A Herbal Drug in Wistar Albino RatsIJAR JOURNALОценок пока нет
- SuperconductorДокумент33 страницыSuperconductorCrisanta GanadoОценок пока нет
- The Idea of Multiple IntelligencesДокумент2 страницыThe Idea of Multiple IntelligencesSiti AisyahОценок пока нет
- Form No. 10-I: Certificate of Prescribed Authority For The Purposes of Section 80DDBДокумент1 страницаForm No. 10-I: Certificate of Prescribed Authority For The Purposes of Section 80DDBIam KarthikeyanОценок пока нет
- Iso 20816 8 2018 en PDFДокумент11 страницIso 20816 8 2018 en PDFEdwin Bermejo75% (4)
- Supporting References in Release 12 SLA PDFДокумент8 страницSupporting References in Release 12 SLA PDFsoireeОценок пока нет
- Google Automatically Generates HTML Versions of Documents As We Crawl The WebДокумент2 страницыGoogle Automatically Generates HTML Versions of Documents As We Crawl The Websuchi ravaliaОценок пока нет
- Indus Valley Sites in IndiaДокумент52 страницыIndus Valley Sites in IndiaDurai IlasunОценок пока нет
- Mirza HRM ProjectДокумент44 страницыMirza HRM Projectsameer82786100% (1)
- Personal Philosophy of Education-Exemplar 1Документ2 страницыPersonal Philosophy of Education-Exemplar 1api-247024656Оценок пока нет
- The Final Bible of Christian SatanismДокумент309 страницThe Final Bible of Christian SatanismLucifer White100% (1)
- Social Awareness CompetencyДокумент30 страницSocial Awareness CompetencyudaykumarОценок пока нет
- Upload A Document To Access Your Download: The Psychology Book, Big Ideas Simply Explained - Nigel Benson PDFДокумент3 страницыUpload A Document To Access Your Download: The Psychology Book, Big Ideas Simply Explained - Nigel Benson PDFchondroc11Оценок пока нет
- Administrative LawДокумент7 страницAdministrative LawNyameka PekoОценок пока нет
- Capstone Report FormatДокумент11 страницCapstone Report FormatAnkush PalОценок пока нет
- Contract of PledgeДокумент4 страницыContract of Pledgeshreya patilОценок пока нет
- Eet 223 (1) Analog Electronics JagjeetДокумент79 страницEet 223 (1) Analog Electronics JagjeetMahima ArrawatiaОценок пока нет
- Faringitis StreptococcusДокумент16 страницFaringitis StreptococcusnurОценок пока нет
- Final Box Design Prog.Документ61 страницаFinal Box Design Prog.afifa kausarОценок пока нет
- Risteski Space and Boundaries Between The WorldsДокумент9 страницRisteski Space and Boundaries Between The WorldsakunjinОценок пока нет
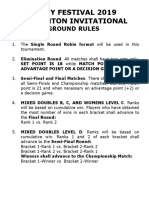
- Ground Rules 2019Документ3 страницыGround Rules 2019Jeremiah Miko LepasanaОценок пока нет
- Strategic Risk ManagementДокумент46 страницStrategic Risk ManagementNuman Rox100% (1)
- CopacabanaДокумент2 страницыCopacabanaNereus Sanaani CAñeda Jr.Оценок пока нет
- 2501 Mathematics Paper+with+solution EveningДокумент10 страниц2501 Mathematics Paper+with+solution EveningNenavath GaneshОценок пока нет