Вам также может понравиться
- 3300 Version 2Документ20 страниц3300 Version 2ibiОценок пока нет
- SR4 Generator and Control Panels - Operation and Maintenance Manual PDFДокумент64 страницыSR4 Generator and Control Panels - Operation and Maintenance Manual PDFMischa CHO94% (16)
- Synergy Element Brochure LowДокумент16 страницSynergy Element Brochure Lowangela1590Оценок пока нет
- Implementation Checklist For ISO 9001 2015 Transition enДокумент10 страницImplementation Checklist For ISO 9001 2015 Transition enSagar Panda100% (1)
- Elevator History and Functions and The Invention of This Amazing Piece of WorkДокумент69 страницElevator History and Functions and The Invention of This Amazing Piece of Workjay vallejosОценок пока нет
- Vacon NX IO Boards User Manual DPD00884A UK PDFДокумент84 страницыVacon NX IO Boards User Manual DPD00884A UK PDFMin Jiang100% (1)
- Cat-CMP Cable GlandДокумент64 страницыCat-CMP Cable GlandSyahirul Alim100% (1)
- Hidral RES540 enДокумент1 страницаHidral RES540 enpaul5791Оценок пока нет
- Yas j3000Документ186 страницYas j3000gangan555Оценок пока нет
- PLCДокумент23 страницыPLCNarendra ChaurasiaОценок пока нет
- Homex SVTДокумент23 страницыHomex SVTAlan TacherОценок пока нет
- Operating Manual: Measuring Amplifier For Instrument Panel MountingДокумент68 страницOperating Manual: Measuring Amplifier For Instrument Panel Mountingrmdoucet100% (1)
- Botnet SetupДокумент18 страницBotnet Setupjajaj moneseОценок пока нет
- S7-300 - Module SpecificationsДокумент588 страницS7-300 - Module SpecificationsTetsusaiga100% (1)
- Programmable Logic Controller (PLC)Документ41 страницаProgrammable Logic Controller (PLC)giriaj kokareОценок пока нет
- DAC STM Application NoteДокумент19 страницDAC STM Application NoteLaura JimenezОценок пока нет
- Ele-Hl en 01 PDFДокумент40 страницEle-Hl en 01 PDFMohd Abu Ajaj100% (2)
- ElevatorДокумент38 страницElevatorÇisem Filiz100% (1)
- Aerodynamicists Directory SAROD2015 PDFДокумент180 страницAerodynamicists Directory SAROD2015 PDFsantoshsОценок пока нет
- Agustawestland Aw189 Search and Rescue: Confidence in Flight. WorldwideДокумент30 страницAgustawestland Aw189 Search and Rescue: Confidence in Flight. Worldwidethomas100% (1)
- Impeler PDFДокумент1 страницаImpeler PDFArief FibonacciОценок пока нет
- VVPДокумент50 страницVVPPhan Tam100% (1)
- ELRV 450 - 10 - 10 - 01eДокумент51 страницаELRV 450 - 10 - 10 - 01eabaelwalid01Оценок пока нет
- Catalog PDFДокумент21 страницаCatalog PDFFakhrur RoziОценок пока нет
- Draft Methodology (G-14)Документ14 страницDraft Methodology (G-14)Javed ParachaОценок пока нет
- Minor Project On Abcd Parameter of Transmission LineДокумент17 страницMinor Project On Abcd Parameter of Transmission LineUjjawal DarvaikarОценок пока нет
- PCB Relay G5laДокумент4 страницыPCB Relay G5laRamón ColónОценок пока нет
- Manual Led ControlДокумент19 страницManual Led ControlLuis ParedesОценок пока нет
- Data Sheet: 品 名:Power Supply SupervisorДокумент9 страницData Sheet: 品 名:Power Supply SupervisoranjgarОценок пока нет
- Tir 60-120Документ9 страницTir 60-120GITANOSOFT GARCIAОценок пока нет
- Busduct CatalogueДокумент38 страницBusduct CataloguesarodepiyushОценок пока нет
- Modernisation Kits: A3 / EN81-21 / Transformation / Cabin MaximisationДокумент5 страницModernisation Kits: A3 / EN81-21 / Transformation / Cabin MaximisationyounesОценок пока нет
- Banasthali University: (Programmable Logiccontroller)Документ21 страницаBanasthali University: (Programmable Logiccontroller)goblockuОценок пока нет
- Inspire 2.1 2500 Eng QSG Rev.AДокумент2 страницыInspire 2.1 2500 Eng QSG Rev.AHaris SmansaОценок пока нет
- BAYNE Taskmaster ManualДокумент33 страницыBAYNE Taskmaster Manualstainless31620039126Оценок пока нет
- Iastar Door DriveДокумент75 страницIastar Door DriveSyed iliyasОценок пока нет
- Gma EДокумент5 страницGma EDull Rahim100% (1)
- Lab MatlabДокумент23 страницыLab MatlabKASHIF KHANОценок пока нет
- Emesa CAR FRAMES 1Документ2 страницыEmesa CAR FRAMES 1Ken LeeОценок пока нет
- Control Unit Vk-2C: User ManualДокумент12 страницControl Unit Vk-2C: User ManuallacОценок пока нет
- 00f4lebk300 PDFДокумент108 страниц00f4lebk300 PDFDull RahimОценок пока нет
- Gps Based Ferry Tracking SystemДокумент10 страницGps Based Ferry Tracking SystemTiamiyu Olalekan TajudeenОценок пока нет
- Fujitec Research Note 3Документ2 страницыFujitec Research Note 3api-249461242Оценок пока нет
- EP Board PDFДокумент2 страницыEP Board PDFReza KühnОценок пока нет
- Car Parking SP SystemДокумент4 страницыCar Parking SP System61engineer61Оценок пока нет
- UtbsДокумент41 страницаUtbsGaurav ChauhaanОценок пока нет
- Aluminium Enclosed Conductor SystemsДокумент32 страницыAluminium Enclosed Conductor SystemsAtilio PesquinОценок пока нет
- Transformer Terminal RET 54 - : Single Transformer System Without Tap Changer ControlДокумент44 страницыTransformer Terminal RET 54 - : Single Transformer System Without Tap Changer ControlBata ZivanovicОценок пока нет
- An75320 001-75320 PDFДокумент34 страницыAn75320 001-75320 PDFVictor CuellarОценок пока нет
- Instruction Manual: LM2A SeriesДокумент73 страницыInstruction Manual: LM2A SeriesроманОценок пока нет
- Control Unit Omega 804: User ManualДокумент12 страницControl Unit Omega 804: User ManualAlexsandro CenteioОценок пока нет
- Light Curtain Guide For ElevatorsДокумент10 страницLight Curtain Guide For ElevatorsFERNSОценок пока нет
- Emergency Stop Examples Sistema Ver 100Документ16 страницEmergency Stop Examples Sistema Ver 100Wer AdОценок пока нет
- SMPS Half Bridge Compacta - EsquemaДокумент1 страницаSMPS Half Bridge Compacta - EsquemaLourival da Silva100% (1)
- Transformer-1 /75W Battery Group: 12V 12V 12V 12V 12VДокумент1 страницаTransformer-1 /75W Battery Group: 12V 12V 12V 12V 12VKen LeeОценок пока нет
- UTL ProfileДокумент13 страницUTL ProfileImran BashaОценок пока нет
- OpampДокумент31 страницаOpampahimsa_katangi100% (5)
- JSA07924E-AA - E-Com Local Wiring (V300)Документ17 страницJSA07924E-AA - E-Com Local Wiring (V300)Mahmoud Omar RobОценок пока нет
- Led 7 SegmentДокумент11 страницLed 7 SegmentCường VũОценок пока нет
- Vacon NXL Lift ALFIFF28 Application Manual UD00973Документ44 страницыVacon NXL Lift ALFIFF28 Application Manual UD00973TanuTiganuОценок пока нет
- LCDv3 33-Rev1AДокумент338 страницLCDv3 33-Rev1AderbalijalelОценок пока нет
- Fr-d700 Instruction Manual (Basic)Документ61 страницаFr-d700 Instruction Manual (Basic)Toni MirandaОценок пока нет
- M100+Start+up+guide Catalog Letter 202007Документ8 страницM100+Start+up+guide Catalog Letter 202007salvorgОценок пока нет
- LS G100 Quick SettingДокумент8 страницLS G100 Quick SettingtrunghieutcОценок пока нет
- SF320Документ7 страницSF320hanifbudi1Оценок пока нет
- GB Assy New BathДокумент1 страницаGB Assy New BathArief FibonacciОценок пока нет
- Foil Plough Folding ASSY PDFДокумент1 страницаFoil Plough Folding ASSY PDFArief FibonacciОценок пока нет
- Housing Bearing MAT SUS Casting Qty 1: All Sharp Edges C0.3-0.5Документ1 страницаHousing Bearing MAT SUS Casting Qty 1: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Rak Material: Dilarang Menaruh Barang, Kecuali Material ProduksiДокумент6 страницRak Material: Dilarang Menaruh Barang, Kecuali Material ProduksiArief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Foil Plough Folding ASSYДокумент1 страницаFoil Plough Folding ASSYArief FibonacciОценок пока нет
- WhatsApp Image 2019-11-08 at 13.34.52Документ1 страницаWhatsApp Image 2019-11-08 at 13.34.52Arief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: PULLEY Ø165x70Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: PULLEY Ø165x70Arief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: HousingДокумент1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: HousingArief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: PULLEY Ø165x70Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: PULLEY Ø165x70Arief FibonacciОценок пока нет
- Impeler MAT SUS Casting Qty 1: All Sharp Edges C0.3-0.5Документ1 страницаImpeler MAT SUS Casting Qty 1: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Harga Cover Unimix Cpi - 20190617 - 0001Документ1 страницаHarga Cover Unimix Cpi - 20190617 - 0001Arief FibonacciОценок пока нет
- Pompa Oval: All Sharp Edges C0.3-0.5Документ1 страницаPompa Oval: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Gambar Penawaran Check Ulang Kalau Sudah Dapaat PO: SHAFT Ø60x442Документ1 страницаGambar Penawaran Check Ulang Kalau Sudah Dapaat PO: SHAFT Ø60x442Arief FibonacciОценок пока нет
- AssyДокумент1 страницаAssyArief FibonacciОценок пока нет
- Cover Housing MAT SUS Casting Qty 1Документ1 страницаCover Housing MAT SUS Casting Qty 1Arief FibonacciОценок пока нет
- HousingДокумент1 страницаHousingArief FibonacciОценок пока нет
- Trial Insert - 20190612 - 0001Документ1 страницаTrial Insert - 20190612 - 0001Arief FibonacciОценок пока нет
- As Ulir M12: All Sharp Edges C0.3-0.5Документ1 страницаAs Ulir M12: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- PULLEY Ø165x70: All Sharp Edges C0.3-0.5Документ1 страницаPULLEY Ø165x70: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Shaft Oval Pump Ø60X442: All Sharp Edges C0.3-0.5Документ1 страницаShaft Oval Pump Ø60X442: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- Assy Pompa OvalДокумент1 страницаAssy Pompa OvalArief FibonacciОценок пока нет
- Sambungan Rantai 220419 PDFДокумент1 страницаSambungan Rantai 220419 PDFArief FibonacciОценок пока нет
- Cover Housing: All Sharp Edges C0.3-0.5Документ1 страницаCover Housing: All Sharp Edges C0.3-0.5Arief FibonacciОценок пока нет
- R200 85 4xM14 4xM10 PCD 195 4xM12 30 PCD 130 12x 14 PCD 320 4xM12 PCD 150Документ1 страницаR200 85 4xM14 4xM10 PCD 195 4xM12 30 PCD 130 12x 14 PCD 320 4xM12 PCD 150Arief FibonacciОценок пока нет
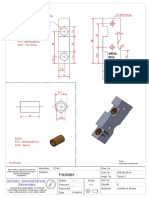
- Holder: Holder P.N: 409.06.0016 MAT.: AL - AlloyДокумент1 страницаHolder: Holder P.N: 409.06.0016 MAT.: AL - AlloyArief FibonacciОценок пока нет
- Sambungan Rantai 220419 PDFДокумент1 страницаSambungan Rantai 220419 PDFArief FibonacciОценок пока нет
- InstallationДокумент2 страницыInstallationAlona AcotОценок пока нет
- Aircon Brochure PDFДокумент6 страницAircon Brochure PDFhhhhhhhhaaОценок пока нет
- Gary White Network EngineerДокумент14 страницGary White Network EngineerUgochukwu FidelisОценок пока нет
- Arduino LCD Set Up2Документ10 страницArduino LCD Set Up2Mikaela MosqueraОценок пока нет
- Variabile: Atribuire - Greeting "Hello" Echo $greetingДокумент8 страницVariabile: Atribuire - Greeting "Hello" Echo $greetingTina CondracheОценок пока нет
- Computer Science 2210 Class 9 Revised Syllabus Break Up2020-21-23Документ5 страницComputer Science 2210 Class 9 Revised Syllabus Break Up2020-21-23MohammadОценок пока нет
- VESDA Programmer ManualДокумент6 страницVESDA Programmer ManualAbdul SamadОценок пока нет
- AOM No. SDOI-2022-018 Mlchelle Dg. Arlola Evelyn A. NisperosДокумент3 страницыAOM No. SDOI-2022-018 Mlchelle Dg. Arlola Evelyn A. NisperosRafael EncarnacionОценок пока нет
- Bagting Marvin: Positions HeldДокумент2 страницыBagting Marvin: Positions HeldMarvin BagtingОценок пока нет
- Excel Budget TemplateДокумент5 страницExcel Budget TemplateChiranjib BanerjeeОценок пока нет
- Brushless DC Motor DriverДокумент3 страницыBrushless DC Motor Driverkvamsee112Оценок пока нет
- Computer Science Syllabus For 4th SemesterДокумент17 страницComputer Science Syllabus For 4th SemesterAnkur Goel67% (3)
- Fortios v7.0.0 Release NotesДокумент91 страницаFortios v7.0.0 Release NotesSandro Henrique de OliveiraОценок пока нет
- An Honest Account of The Humbling Experi PDFДокумент424 страницыAn Honest Account of The Humbling Experi PDFGayatriОценок пока нет
- Aristotelis OperaДокумент921 страницаAristotelis OperaAllison HobbsОценок пока нет
- 1 2 3 4 Bro Smart TC Eng PDFДокумент4 страницы1 2 3 4 Bro Smart TC Eng PDFnguyenОценок пока нет
- 1574158341-Resume AjayLanjewar QA 8YrsExp1Документ7 страниц1574158341-Resume AjayLanjewar QA 8YrsExp1ragunath90Оценок пока нет
- Applicability Guide PDFДокумент2 страницыApplicability Guide PDFtriplbingaziОценок пока нет
- ED-EDM-P1-F1 Service Information Sheet PDFДокумент4 страницыED-EDM-P1-F1 Service Information Sheet PDFMohammed sabatinОценок пока нет
- Ccs352-Maa - SyllabusДокумент3 страницыCcs352-Maa - SyllabusReshma Radhakrishnan0% (1)
- FAQ AWS AcademyДокумент3 страницыFAQ AWS AcademyMohamed Chiheb BEN CHAABANEОценок пока нет
- 1.introduction To Bigdata Chap1Документ35 страниц1.introduction To Bigdata Chap1Snoussi OussamaОценок пока нет
- Electric and Hybrid Electric Vehicles 1 Edition James D Halderman Full ChapterДокумент63 страницыElectric and Hybrid Electric Vehicles 1 Edition James D Halderman Full Chaptersusie.menefee409100% (7)
- Software-Defined Networking (SDN) : Antônio Marcos AlbertiДокумент16 страницSoftware-Defined Networking (SDN) : Antônio Marcos AlbertiAmira DhorbaniОценок пока нет