Вам также может понравиться
- Lecture 23 - MODELING FINITE STATE MACHINESДокумент15 страницLecture 23 - MODELING FINITE STATE MACHINESMagendran PKОценок пока нет
- Finite State Machines With Output (Mealy and Moore Machines)Документ17 страницFinite State Machines With Output (Mealy and Moore Machines)Satish AripakaОценок пока нет
- Lec 34Документ15 страницLec 34Yellasiri SureshОценок пока нет
- Unit 6 - FinalДокумент24 страницыUnit 6 - Finalsuniljain007Оценок пока нет
- Unit - 1 DSDДокумент56 страницUnit - 1 DSDultimatekp144Оценок пока нет
- MIT6 01SCS11 Chap04Документ53 страницыMIT6 01SCS11 Chap04creeshaОценок пока нет
- 14 Finite StateДокумент35 страниц14 Finite Statenani10Оценок пока нет
- 2a4-Registered Logic and State MachinesДокумент10 страниц2a4-Registered Logic and State MachinesTen PagesОценок пока нет
- Maths Turing MachinesДокумент5 страницMaths Turing MachinesBhasinee ManageОценок пока нет
- Sequence Detector PaperДокумент8 страницSequence Detector PaperVicky RОценок пока нет
- Lecture 11Документ21 страницаLecture 11fotescuiondaniel7Оценок пока нет
- UNIT 1 TOC Sem5 RGPVДокумент12 страницUNIT 1 TOC Sem5 RGPVHolija100% (1)
- State MachinesДокумент53 страницыState MachinesJagpreet5370Оценок пока нет
- Application of Finite AutomataДокумент9 страницApplication of Finite AutomataPriyanka GoyalОценок пока нет
- FSM Design Using Verilog - ElectrosoftsДокумент7 страницFSM Design Using Verilog - ElectrosoftsAbhishek KumarОценок пока нет
- Today We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)Документ11 страницToday We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)GASHU MESFINОценок пока нет
- Application of Finite AutomataДокумент9 страницApplication of Finite AutomataxkОценок пока нет
- Lec 33Документ13 страницLec 33REWANTH FFОценок пока нет
- Finite State Machines: Chapter 11 - Sequential CircuitsДокумент12 страницFinite State Machines: Chapter 11 - Sequential CircuitsmadhunathОценок пока нет
- Fpga Implementation of Memory Controller FSM Using Simulink2Документ57 страницFpga Implementation of Memory Controller FSM Using Simulink2AKОценок пока нет
- Lec 36Документ14 страницLec 36Yellasiri SureshОценок пока нет
- Comparative study on Moore and Mealy State MachinesДокумент10 страницComparative study on Moore and Mealy State MachinesH052 Rajesh Komaravalli ECEОценок пока нет
- Finite State MachinesДокумент69 страницFinite State MachinesUjwal ManhasОценок пока нет
- 10 1 1 37 307Документ50 страниц10 1 1 37 307Oluponmile AdeolaОценок пока нет
- CS 501 TOC Lab ManualДокумент28 страницCS 501 TOC Lab ManualAnupriya JainОценок пока нет
- Reviewer AutomataДокумент7 страницReviewer AutomataRe ErОценок пока нет
- Rising Edge Detector, Debounce CKT, Testing CKT For ThatДокумент10 страницRising Edge Detector, Debounce CKT, Testing CKT For ThataminhardОценок пока нет
- Table of Laplace and Z TransformsДокумент33 страницыTable of Laplace and Z TransformsAlimamy KoromaОценок пока нет
- Tutorial 5Документ31 страницаTutorial 5Sathish KumarОценок пока нет
- An Introduction To Z TransformsДокумент26 страницAn Introduction To Z TransformsVarsha JiОценок пока нет
- Finite State MachinesДокумент8 страницFinite State MachinesHnd FinalОценок пока нет
- Learn Finite-State MachinesДокумент75 страницLearn Finite-State Machinescall_asitОценок пока нет
- FC TkcyДокумент73 страницыFC TkcyAjayОценок пока нет
- Xilinx ISE Tutorial: Modeling State MachinesДокумент14 страницXilinx ISE Tutorial: Modeling State Machinesmdzakir_hussainОценок пока нет
- Synchronous Sequential CircuitsДокумент10 страницSynchronous Sequential CircuitsDenise NelsonОценок пока нет
- Asgnmt6 (522) Tawab SirДокумент11 страницAsgnmt6 (522) Tawab SirDil NawazОценок пока нет
- Flying Crazyflie Nanocopters With The Leap MotionДокумент13 страницFlying Crazyflie Nanocopters With The Leap Motionkimctine100% (1)
- State Space WikiДокумент13 страницState Space WikiTeju DaveОценок пока нет
- Lecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Документ4 страницыLecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Debashish PalОценок пока нет
- Unit 1 - Theory of ComputationДокумент13 страницUnit 1 - Theory of Computationshivam singhОценок пока нет
- How-to-Design-a-Finite-State-Machine-Sequence-DetectorДокумент14 страницHow-to-Design-a-Finite-State-Machine-Sequence-Detectorzlh14188Оценок пока нет
- Lab 4 - Finite State Machines: GoalsДокумент7 страницLab 4 - Finite State Machines: GoalsJoey WangОценок пока нет
- File - Theory of AutomataДокумент51 страницаFile - Theory of AutomataEarn ReferralОценок пока нет
- Lec26 PDFДокумент16 страницLec26 PDFarunika palОценок пока нет
- Aho-Corasick String MatchingДокумент24 страницыAho-Corasick String MatchingArabs KnightОценок пока нет
- Tocmod 2Документ79 страницTocmod 2nutlearnersОценок пока нет
- U3-L3 Finite State Machine ModelДокумент7 страницU3-L3 Finite State Machine ModeljjjОценок пока нет
- Lec52 PDFДокумент15 страницLec52 PDFabm999100% (1)
- Unit-2 Introduction to Finite Automata.pdfДокумент68 страницUnit-2 Introduction to Finite Automata.pdfnikhillamsal1Оценок пока нет
- The Theory of AutomataДокумент53 страницыThe Theory of AutomataAbhinav KumarОценок пока нет
- AutoДокумент7 страницAutoamukhopadhyayОценок пока нет
- Assignment 1Документ12 страницAssignment 1Germán Gallardo DuránОценок пока нет
- Lab10 - Finite State MachinesДокумент7 страницLab10 - Finite State Machineswert1a2Оценок пока нет
- Automata Theory Is An Exciting, Theoretical Branch of Computer Science. It Established Its Roots During The 20thДокумент5 страницAutomata Theory Is An Exciting, Theoretical Branch of Computer Science. It Established Its Roots During The 20thrimshaОценок пока нет
- Finite-State Machine (FSM) : TaskДокумент7 страницFinite-State Machine (FSM) : TaskelexboyОценок пока нет
- Finite State Machine DissertationДокумент4 страницыFinite State Machine DissertationBuyCustomPapersOnlineSingapore100% (1)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesОт EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesРейтинг: 5 из 5 звезд5/5 (1)
- 06 EthernetДокумент17 страниц06 EthernetDebashish PalОценок пока нет
- Comparative Study On IEEE Standard of WPAN 802.15.1/ 3/ 4: Adhitya SableДокумент4 страницыComparative Study On IEEE Standard of WPAN 802.15.1/ 3/ 4: Adhitya SableDebashish PalОценок пока нет
- A C13 Adv - Routing PDFДокумент186 страницA C13 Adv - Routing PDFViệt NguyễnОценок пока нет
- Data Communication, p.3 4Документ35 страницData Communication, p.3 4Mehdi RabbaniОценок пока нет
- Lecture Notes On Operating SystemДокумент10 страницLecture Notes On Operating SystemSumit SinghОценок пока нет
- Basic Input Output System: (BIOS)Документ20 страницBasic Input Output System: (BIOS)Amimul Ehasan ShakibОценок пока нет
- Understanding the Function and Configuration of BIOSДокумент10 страницUnderstanding the Function and Configuration of BIOSArnel Cueto100% (1)
- ARQ Protocols Lectures3 - 4Документ28 страницARQ Protocols Lectures3 - 4Debashish PalОценок пока нет
- CS 457 - Lecture 20 Transport Layer: UDP and TCP: Fall 2011Документ28 страницCS 457 - Lecture 20 Transport Layer: UDP and TCP: Fall 2011Debashish PalОценок пока нет
- ARQ Protocols Lectures3 - 4Документ28 страницARQ Protocols Lectures3 - 4Debashish PalОценок пока нет
- 06 Datalink PDFДокумент7 страниц06 Datalink PDFDebashish PalОценок пока нет
- Arp, Slip, PPP Lec34Документ37 страницArp, Slip, PPP Lec34Debashish PalОценок пока нет
- U WaveДокумент23 страницыU WavetranquocvinhtechОценок пока нет
- Lecture overview: Application layer and socket programmingДокумент9 страницLecture overview: Application layer and socket programmingDebashish PalОценок пока нет
- Arp, Slip, PPP Lec34Документ37 страницArp, Slip, PPP Lec34Debashish PalОценок пока нет
- Lecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Документ4 страницыLecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Debashish PalОценок пока нет
- Lecture Notes On Operating SystemДокумент10 страницLecture Notes On Operating SystemSumit SinghОценок пока нет
- Lag and Lead CompensatorsДокумент21 страницаLag and Lead CompensatorsHariPriyan100% (7)
- U WaveДокумент23 страницыU WavetranquocvinhtechОценок пока нет
- Stability Margins: NegativeДокумент5 страницStability Margins: NegativeTejaswi J DamerlaОценок пока нет
- Ee43308 l1-3 PDFДокумент22 страницыEe43308 l1-3 PDFranjitaОценок пока нет
- State - Space Linear Systems PDFДокумент6 страницState - Space Linear Systems PDFDebashish PalОценок пока нет
- Electromagnetic Waves: Electromagnetic Wave at The Interface Between Two Dielectric MediaДокумент15 страницElectromagnetic Waves: Electromagnetic Wave at The Interface Between Two Dielectric MediagopalОценок пока нет
- Learn Finite-State MachinesДокумент75 страницLearn Finite-State Machinescall_asitОценок пока нет
- Chap7 PDFДокумент58 страницChap7 PDFPauloОценок пока нет
- Lect 7Документ6 страницLect 7Debashish PalОценок пока нет
- U WaveДокумент23 страницыU WavetranquocvinhtechОценок пока нет
- Material On FSM DesignДокумент14 страницMaterial On FSM DesignaroxarОценок пока нет
- Lecture #7: Intro To Synchronous Sequential State Machine DesignДокумент13 страницLecture #7: Intro To Synchronous Sequential State Machine DesignMayamakbariОценок пока нет
- Get Rid of Streamyx Intermittent ConnectionДокумент8 страницGet Rid of Streamyx Intermittent ConnectionsathevilОценок пока нет
- DLW5BTM501TQ2Документ246 страницDLW5BTM501TQ2sivaram0% (1)
- EWSD Digital Switching System OverviewДокумент35 страницEWSD Digital Switching System OverviewJorge Alejandro MartinezОценок пока нет
- Smartnav Software Flash Procedure 6-11 - Dealer r040213Документ14 страницSmartnav Software Flash Procedure 6-11 - Dealer r040213Jose AG0% (1)
- 0349-600-Example Protocol Stacks For Interconnecting CBC and BSCДокумент35 страниц0349-600-Example Protocol Stacks For Interconnecting CBC and BSCSebastianОценок пока нет
- Routing Protocols Routing Protocols: ReferencesДокумент10 страницRouting Protocols Routing Protocols: ReferencesRockRahilОценок пока нет
- Description of STM32F4xx HAL Drivers PDFДокумент964 страницыDescription of STM32F4xx HAL Drivers PDFmehmet100% (1)
- sg245946 PDFДокумент556 страницsg245946 PDFpeymanОценок пока нет
- ZTE DRBC (ZTE Dynamic Radio Bearer Control Algorithm)Документ45 страницZTE DRBC (ZTE Dynamic Radio Bearer Control Algorithm)Faise Jan100% (3)
- The Holy Panchayat by Premchand PDFДокумент3 страницыThe Holy Panchayat by Premchand PDFKhushi KashyapОценок пока нет
- Advanced Swing Components GuideДокумент30 страницAdvanced Swing Components GuidevaishuОценок пока нет
- Metadata Files: Layout of An NTFS Volume When Formatting Has FinishedДокумент7 страницMetadata Files: Layout of An NTFS Volume When Formatting Has FinishedJiya KhanОценок пока нет
- I 30 I 40Документ27 страницI 30 I 40Ken WonОценок пока нет
- Ds Yhy522 en RFIDДокумент41 страницаDs Yhy522 en RFIDNick ten CateОценок пока нет
- Cloud Computing Chapter 10Документ42 страницыCloud Computing Chapter 10ghar_dashОценок пока нет
- Export Import Oracledatabase While Spliting Dump FileДокумент4 страницыExport Import Oracledatabase While Spliting Dump FileLenny MwangiОценок пока нет
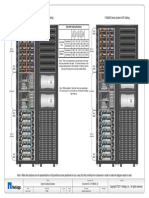
- FAS6200 Series System Cabling ExamplesДокумент1 страницаFAS6200 Series System Cabling ExamplesNishit PillayОценок пока нет
- Test PreparationДокумент17 страницTest PreparationSalman HaiderОценок пока нет
- EPC Feature ListДокумент18 страницEPC Feature Listelectrico services0% (1)
- Digital VLSI Chip Design With Cadence and Synopsys CAD ToolsДокумент366 страницDigital VLSI Chip Design With Cadence and Synopsys CAD ToolsMacy Yuan80% (5)
- 2-3 WLAN OverviewДокумент45 страниц2-3 WLAN OverviewSatish KumarОценок пока нет
- Concurrent Train Simulation AbstractДокумент4 страницыConcurrent Train Simulation AbstractTelika RamuОценок пока нет
- Company Profile: A. VisionДокумент3 страницыCompany Profile: A. Visionrizky akbarОценок пока нет
- Manual de Teatro en Casa Nuevo PanasonicДокумент56 страницManual de Teatro en Casa Nuevo PanasonicMiguel Angel Aguilar BarahonaОценок пока нет
- IimДокумент3 страницыIimRitesh SharmaОценок пока нет
- EWS Bluegiga Bluetooth ExampleДокумент5 страницEWS Bluegiga Bluetooth ExampleBeneditoОценок пока нет
- Huawei Uae Interview QuestionДокумент6 страницHuawei Uae Interview Questioninfo vistaОценок пока нет
- 300715J Rock Digitizer User ManualДокумент367 страниц300715J Rock Digitizer User ManualCarlos SanchezОценок пока нет
- Bodyweight Beast Files PDFДокумент4 страницыBodyweight Beast Files PDFJoe Merengues0% (3)
- Lesson PlanДокумент3 страницыLesson PlanzarookОценок пока нет