Вам также может понравиться
- Module WIFI TYWE3S User ManualДокумент13 страницModule WIFI TYWE3S User ManualPen TranОценок пока нет
- Fall Detection Algorithm CompiledДокумент16 страницFall Detection Algorithm CompiledChing Wai YongОценок пока нет
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesДокумент7 страницAn Intelligent Line-Following Robot Project For Introductory Robot CoursesAmla SingОценок пока нет
- Image Processing To Manipulate RGB Values Using Verilog.Документ5 страницImage Processing To Manipulate RGB Values Using Verilog.Ashutosh LembheОценок пока нет
- Giáo Trình LabviewДокумент54 страницыGiáo Trình LabviewXuan Chiem0% (1)
- BTS OverviewДокумент12 страницBTS OverviewDiwakar Mishra100% (1)
- Laboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationДокумент3 страницыLaboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationbichchaukmtОценок пока нет
- MTTCNДокумент296 страницMTTCNCarlosОценок пока нет
- Manual On Design of LNA Using ADSДокумент33 страницыManual On Design of LNA Using ADSThabasum Aara SОценок пока нет
- Tetris PDFДокумент4 страницыTetris PDFShubham JagtapОценок пока нет
- 8k Bit Using 6t SramДокумент8 страниц8k Bit Using 6t SramSwati Navdeep AggarwalОценок пока нет
- Chapter 1Документ21 страницаChapter 1anithaarumallaОценок пока нет
- Roberts Edge DetectorДокумент7 страницRoberts Edge DetectorNaser MahmoudiОценок пока нет
- C++ Project: BombermanДокумент10 страницC++ Project: BombermanTsepo ShataОценок пока нет
- Lab BalanceДокумент1 страницаLab BalancephuceltnОценок пока нет
- My Thesis BOOKДокумент7 страницMy Thesis BOOKjaaduuОценок пока нет
- Unit-V 6703Документ84 страницыUnit-V 6703Ragunath T100% (1)
- A19 Image Compression Using Pca TechniqueДокумент14 страницA19 Image Compression Using Pca TechniqueAshwin S PurohitОценок пока нет
- Chapter 8 ProblemsДокумент21 страницаChapter 8 Problemskhrid3100% (2)
- CS 8491 Computer ArchitectureДокумент103 страницыCS 8491 Computer ArchitectureMUKESH KUMAR P 2019-2023 CSEОценок пока нет
- 1.2 MARS Data Cache Simulator ToolДокумент2 страницы1.2 MARS Data Cache Simulator Toolamarsdd7238Оценок пока нет
- Worksheet 4-Input+OutputДокумент5 страницWorksheet 4-Input+OutputShiza SiddiqueОценок пока нет
- Final Exam 2021.1 For Technical Writing and Presentation: Date Submit in Class On The Day of Multiple-Choice ExamДокумент2 страницыFinal Exam 2021.1 For Technical Writing and Presentation: Date Submit in Class On The Day of Multiple-Choice ExamKhoa ĐTTT Nguyễn Tiến HòaОценок пока нет
- Interleave Division Multiple Access (Idma)Документ21 страницаInterleave Division Multiple Access (Idma)Parth PatelОценок пока нет
- WLAN Lab Opnet TutorialДокумент9 страницWLAN Lab Opnet TutorialMohtiPearl0% (1)
- Speed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablesДокумент10 страницSpeed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablespedroОценок пока нет
- Mobile Adhoc NetworkДокумент5 страницMobile Adhoc Networkpurushothaman sinivasanОценок пока нет
- VLSI Design Mid 2Документ3 страницыVLSI Design Mid 2mohanОценок пока нет
- Ls All PDFДокумент176 страницLs All PDFNasirОценок пока нет
- Ch2 Ch3 MinaДокумент10 страницCh2 Ch3 MinaMena EssamОценок пока нет
- Lab ViewДокумент39 страницLab ViewKlodian PerhatiОценок пока нет
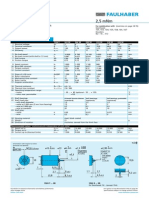
- Faulhaber DatasheetДокумент5 страницFaulhaber DatasheetMuhammad SharifОценок пока нет
- 1) Difference Between GPP, ASSP& ASIP General Purpose ProcessorДокумент11 страниц1) Difference Between GPP, ASSP& ASIP General Purpose ProcessorBilisummaa LammiiОценок пока нет
- OmniRoller Holonomic Drive TutorialДокумент11 страницOmniRoller Holonomic Drive TutorialYoussef AbbasОценок пока нет
- Install STEP7 WinCC V16 enUS PDFДокумент84 страницыInstall STEP7 WinCC V16 enUS PDFDjebbi SamiОценок пока нет
- NithДокумент17 страницNithChamila PrabathОценок пока нет
- Analog and Digital Communication Question BankДокумент8 страницAnalog and Digital Communication Question BankThennarasu JayaramanОценок пока нет
- IpbalanceДокумент1 страницаIpbalancephuceltnОценок пока нет
- DC Motor Direction Control Using Power TriacДокумент7 страницDC Motor Direction Control Using Power TriacAshok KumarОценок пока нет
- Physics of Medical X-Ray Imaging (1) Chapter 10: Figure 10.1. Digital Radiographic System DesignДокумент21 страницаPhysics of Medical X-Ray Imaging (1) Chapter 10: Figure 10.1. Digital Radiographic System DesignNguyen Cong HuynhОценок пока нет
- Fight Night Champion GDC PresentationДокумент75 страницFight Night Champion GDC Presentationc0de517e.blogspot.comОценок пока нет
- Blanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehicleДокумент12 страницBlanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehiclemaysamshОценок пока нет
- Study On Characteristics of Distributed Feedback (DFB) LASER As Light Source For Optical Fiber Communication SystemДокумент7 страницStudy On Characteristics of Distributed Feedback (DFB) LASER As Light Source For Optical Fiber Communication Systemmahfuz13bdОценок пока нет
- It342 Basic Video Compression StandardsДокумент34 страницыIt342 Basic Video Compression StandardsSamОценок пока нет
- Memory - Lec 3Документ74 страницыMemory - Lec 3Danu NimОценок пока нет
- Grafcet Step 7Документ34 страницыGrafcet Step 7Mazarel AurelОценок пока нет
- CMOS PortДокумент46 страницCMOS PortZali100% (1)
- Inverted PendulamДокумент34 страницыInverted PendulamVi JayОценок пока нет
- JPEGДокумент29 страницJPEGRakesh InaniОценок пока нет
- Chapter 7 PDFДокумент16 страницChapter 7 PDFUditi AroraОценок пока нет
- TC 300 Uc InglesДокумент62 страницыTC 300 Uc InglesTamo Activo MusicОценок пока нет
- Wavelets and Multiresolution Processing PDFДокумент15 страницWavelets and Multiresolution Processing PDFAhmad RazaОценок пока нет
- Chapter 11 - MPEG Video Coding I - MPEG-1 and 2Документ39 страницChapter 11 - MPEG Video Coding I - MPEG-1 and 2Mehul GavitОценок пока нет
- 2 DviewingДокумент50 страниц2 DviewingNivedita k100% (1)
- Contrast StretchingДокумент9 страницContrast StretchingKaustav MitraОценок пока нет
- JPEG Project ReportДокумент16 страницJPEG Project ReportDinesh Ginjupalli100% (1)
- Embedded Systems Notes MidtermsДокумент67 страницEmbedded Systems Notes MidtermsCol. Jerome Carlo Magmanlac, ACP100% (1)
- 2 To 1 MuxДокумент19 страниц2 To 1 MuxTelmoDiez100% (1)
- Tutorial ColmapДокумент8 страницTutorial ColmapSam BaОценок пока нет
- KJ Mohamed Dhanish MIP 2Документ36 страницKJ Mohamed Dhanish MIP 2180051601033 ecea2018Оценок пока нет
- Shot List: Film: Whisper Director: Rukhsar Zamir Camera: Laveezah Khan Location: A HouseДокумент2 страницыShot List: Film: Whisper Director: Rukhsar Zamir Camera: Laveezah Khan Location: A HouseAnonymous m5d0k9V0Оценок пока нет
- Fed STD H28aДокумент11 страницFed STD H28amurphygtОценок пока нет
- Modern ArtДокумент134 страницыModern Artfulup100% (4)
- Paintshop Pro x9 PDFДокумент823 страницыPaintshop Pro x9 PDFVenâncio Edilson Victorino100% (1)
- Guide To SOP Image Layout Image Manipulation in PhotoshopДокумент34 страницыGuide To SOP Image Layout Image Manipulation in PhotoshopUtpal YadulОценок пока нет
- Why The Book Isn't Dead: An Essay On Ebooks and The Future of The Publishing IndustryДокумент6 страницWhy The Book Isn't Dead: An Essay On Ebooks and The Future of The Publishing Industrytangiblepublications100% (2)
- Glossy Magazine Issue 5 PreviewДокумент21 страницаGlossy Magazine Issue 5 PreviewGlossy Magazine33% (9)
- JMG 213e - Perancangan Akademik 2015-2016Документ8 страницJMG 213e - Perancangan Akademik 2015-2016SureskumarMariskrishananОценок пока нет
- Drone Harmony Supported HardwareДокумент3 страницыDrone Harmony Supported HardwareGeomatikaPEP SurveyОценок пока нет
- History of The MicroscopeДокумент11 страницHistory of The MicroscopeAhmad AliОценок пока нет
- Lok Sewa AayogДокумент31 страницаLok Sewa AayogPriyanka ThakurОценок пока нет
- Soft Tissue Angular and Linear Measurements in Kanpur PopulationДокумент7 страницSoft Tissue Angular and Linear Measurements in Kanpur PopulationInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Jacob Riis Champion of The PoorДокумент23 страницыJacob Riis Champion of The Poortutorial 001Оценок пока нет
- Jeep110 PDFДокумент7 страницJeep110 PDFJitendra TiwariОценок пока нет
- Refresher TopicsДокумент51 страницаRefresher TopicsChamila JayasundaraОценок пока нет
- CSharp For Sharp Kids - Part 2 Learning To Communicate PDFДокумент57 страницCSharp For Sharp Kids - Part 2 Learning To Communicate PDFRavi RanjanОценок пока нет
- 2006 Compilation North American Native Orchid JournalДокумент76 страниц2006 Compilation North American Native Orchid JournalNorth American Native Orchid JournalОценок пока нет
- Black Angels (Crumb)Документ3 страницыBlack Angels (Crumb)M. KorhonenОценок пока нет
- Shutterbug 2010 08Документ188 страницShutterbug 2010 08Aleksandar Saric100% (1)
- Lab Report 2 - CytologyДокумент7 страницLab Report 2 - CytologyDa Nie L100% (1)
- Samsung Galaxy A8Документ8 страницSamsung Galaxy A8pauletteОценок пока нет
- Vistaray GBДокумент6 страницVistaray GBramukumarОценок пока нет
- Paley On Agni ParikshaДокумент31 страницаPaley On Agni ParikshaBill BenzonОценок пока нет
- Ray Optics Class NotesДокумент5 страницRay Optics Class NotescutebeneОценок пока нет
- Spectacular Homes and PastoralДокумент29 страницSpectacular Homes and Pastoraljudit456Оценок пока нет
- Proxima CentauriДокумент14 страницProxima CentaurihurlyhutyoОценок пока нет
- Forest GuardДокумент1 страницаForest GuardAnonymous U6wEfrL5Оценок пока нет
- From Malraux's Imaginary Museum To The Virtual MuseumДокумент6 страницFrom Malraux's Imaginary Museum To The Virtual MuseumLeo GonzalezОценок пока нет
- Appendix - VGB ClassificationДокумент3 страницыAppendix - VGB ClassificationNaeem UddinОценок пока нет
- NY Drivers License HistoryДокумент8 страницNY Drivers License HistoryMarco De Moor BeyОценок пока нет