Вам также может понравиться
- Exp 9 Introduction To MachinesДокумент11 страницExp 9 Introduction To MachinesMuhammad AwaisОценок пока нет
- Converting Car Starter Motors For Your Robot: 2.1 Disconnecting The Field WindingДокумент9 страницConverting Car Starter Motors For Your Robot: 2.1 Disconnecting The Field WindingSenadGrabovacОценок пока нет
- Electrical Circuit FabricationДокумент12 страницElectrical Circuit FabricationKevin BowlesОценок пока нет
- MIT2 007s09 Exam01bДокумент7 страницMIT2 007s09 Exam01bEum MavОценок пока нет
- Mercedes Vito WSA 639 D30 AngielskaДокумент2 страницыMercedes Vito WSA 639 D30 AngielskaAlberto Lopez AlmarchaОценок пока нет
- Instruction Firefly Fitting J RangeДокумент12 страницInstruction Firefly Fitting J RangeСергей сергеевичОценок пока нет
- Remove Final Drive Pinions and FlangesДокумент7 страницRemove Final Drive Pinions and Flangesrapha raphaОценок пока нет
- How To Make A Homemade RC Helicopter: InstructionsДокумент10 страницHow To Make A Homemade RC Helicopter: InstructionsAlecia ThomasОценок пока нет
- Project Report-Davidson Davidoff Diallo Impact Driver Fall2022-3Документ39 страницProject Report-Davidson Davidoff Diallo Impact Driver Fall2022-3api-646708752Оценок пока нет
- Remove Sprocket ShaftsДокумент4 страницыRemove Sprocket ShaftsDONEYS PEREZОценок пока нет
- Disassembly and Assembly Break 950fДокумент75 страницDisassembly and Assembly Break 950fLuis Carlos RamosОценок пока нет
- Round-a-Bot DR3 ReportДокумент57 страницRound-a-Bot DR3 Reportkimdl5Оценок пока нет
- Cigüeñal - Instalar: Tabla 1Документ5 страницCigüeñal - Instalar: Tabla 1Miguel Angel Garrido CardenasОценок пока нет
- 627F Caja2Документ35 страниц627F Caja2thiherОценок пока нет
- Flywheel Housing & AlternatorsДокумент9 страницFlywheel Housing & AlternatorsLukman ChairkiandraОценок пока нет
- D342 Vehicular Engine 76V00001-00504 (MaДокумент5 страницD342 Vehicular Engine 76V00001-00504 (MaOmar SuazoОценок пока нет
- Swing Rack - InstallДокумент7 страницSwing Rack - InstallGilney FreitasОценок пока нет
- Section 10 - Power Take-OffДокумент19 страницSection 10 - Power Take-OffMiller Andres ArocaОценок пока нет
- Adjust Pre Load Wheel Bearing 777 AGCДокумент4 страницыAdjust Pre Load Wheel Bearing 777 AGCFaidh Allanz FairhiaОценок пока нет
- Brakekit PDFДокумент3 страницыBrakekit PDFTia KeyОценок пока нет
- PE Jaw crusher manual-英文Документ22 страницыPE Jaw crusher manual-英文Edwin Forero100% (3)
- Magpower Clutch Model CДокумент4 страницыMagpower Clutch Model CJuan CaceresОценок пока нет
- Differential & Bevel GearДокумент7 страницDifferential & Bevel GearNadhifatulОценок пока нет
- Component DescriptionДокумент5 страницComponent DescriptionWillian HPОценок пока нет
- Caterpillar Cat 245 EXCAVATOR (Prefix 94L) Service Repair Manual (94L00255 and Up)Документ23 страницыCaterpillar Cat 245 EXCAVATOR (Prefix 94L) Service Repair Manual (94L00255 and Up)rpoy9396615Оценок пока нет
- Frame and BodyДокумент26 страницFrame and Bodymoldovan adrianОценок пока нет
- Desarmado & Armado Eje Trasero 426BДокумент14 страницDesarmado & Armado Eje Trasero 426BAbelardo Pina100% (1)
- Remove and Install Crankshaft Main BearingsДокумент3 страницыRemove and Install Crankshaft Main Bearingsramom candido de macedoОценок пока нет
- Electric Starter For KJ66 and Similar Jet EnginesДокумент7 страницElectric Starter For KJ66 and Similar Jet EnginesLucho QuemeroОценок пока нет
- 320d Replacing The Governor ActuatorДокумент4 страницы320d Replacing The Governor ActuatoraliОценок пока нет
- Encendido Del Motor Del SolenoideДокумент6 страницEncendido Del Motor Del SolenoideKrz F. BlancoОценок пока нет
- BS3 Crank TriggerДокумент27 страницBS3 Crank TriggerdaveplОценок пока нет
- Transmission and Transfer Gears (Power Shift Without Cab)Документ49 страницTransmission and Transfer Gears (Power Shift Without Cab)David MercadoОценок пока нет
- Troca de Governor e AtuadorДокумент4 страницыTroca de Governor e AtuadorrodineiОценок пока нет
- Caterpillar Cat 330 L EXCAVATOR (Prefix 2EL) Service Repair Manual (2EL00001 and Up)Документ27 страницCaterpillar Cat 330 L EXCAVATOR (Prefix 2EL) Service Repair Manual (2EL00001 and Up)kfm8seuudu100% (1)
- BC BRONCO Rear Disk Brakes: B.C. BRONCOS Tech LibraryДокумент11 страницBC BRONCO Rear Disk Brakes: B.C. BRONCOS Tech LibrarycarlvpОценок пока нет
- Dokumen - Tips - Caterpillar Cat d6h Track Type Tractor Prefix 6fc Service Repair Manual 6fc00001 03999 1626639572Документ24 страницыDokumen - Tips - Caterpillar Cat d6h Track Type Tractor Prefix 6fc Service Repair Manual 6fc00001 03999 1626639572jose luisОценок пока нет
- Procedura de Inlocuire A Cuplajului Flexibil Al Arborelui Melcat La Mdps Cu ZgomotДокумент15 страницProcedura de Inlocuire A Cuplajului Flexibil Al Arborelui Melcat La Mdps Cu ZgomotRodos96Оценок пока нет
- DTSДокумент7 страницDTSmithundme659Оценок пока нет
- 3412econnecting Rod BearingДокумент4 страницы3412econnecting Rod BearingMohammed MustafaОценок пока нет
- MSD 4151Документ8 страницMSD 4151rxhughesОценок пока нет
- Tracks: Fonctionnement Des SystèmesДокумент4 страницыTracks: Fonctionnement Des SystèmesChakrouneОценок пока нет
- 6bearing - Remove and InstallДокумент7 страниц6bearing - Remove and InstallZawminhtunОценок пока нет
- Cat 3176c Montagem Da Cabeça.Документ7 страницCat 3176c Montagem Da Cabeça.César PérezОценок пока нет
- 841 - Pdfsam - SM PC300LC, HD-8 A90001, A87001 Up CEBM018701Документ80 страниц841 - Pdfsam - SM PC300LC, HD-8 A90001, A87001 Up CEBM018701jaime bolivarОценок пока нет
- 3408E and 3412E Crankshaft Main Bearings - InstallДокумент6 страниц3408E and 3412E Crankshaft Main Bearings - Installalonso100% (1)
- 3412E Piston and Connecting Rod AssemblyДокумент11 страниц3412E Piston and Connecting Rod AssemblyMohammed Mostafa100% (2)
- Replace Governor ActuatorДокумент8 страницReplace Governor ActuatorSteven ManuputtyОценок пока нет
- Rocker Shaft and Push Rods - InstallДокумент5 страницRocker Shaft and Push Rods - InstallRajan MullappillyОценок пока нет
- Development of High Efficiency Brushless DC Motor With New Manufacturing Method of Stator For CompressorsДокумент10 страницDevelopment of High Efficiency Brushless DC Motor With New Manufacturing Method of Stator For CompressorsAnonymous di05J3ZkTRОценок пока нет
- Preload Bearing Final DriveДокумент6 страницPreload Bearing Final DrivemahmudiОценок пока нет
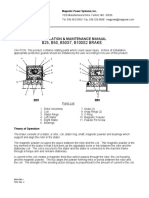
- Magpower B25 B50 BrakesДокумент4 страницыMagpower B25 B50 BrakesJuan CaceresОценок пока нет
- User Manual: Seba Hydrometrie GMBH & Co. KGДокумент16 страницUser Manual: Seba Hydrometrie GMBH & Co. KGChristian LamertzОценок пока нет
- Antenna Pros Digital HD TV Antenna: AX-903, AX-906, AX-909 ManualДокумент7 страницAntenna Pros Digital HD TV Antenna: AX-903, AX-906, AX-909 ManualMoh NasrОценок пока нет
- Caterpillar Cat 160h Motor Grader Prefix 9jm Service Repair Manual 9jm00001 and UpДокумент23 страницыCaterpillar Cat 160h Motor Grader Prefix 9jm Service Repair Manual 9jm00001 and UpWalter RodriguezОценок пока нет
- Manette 4SNДокумент13 страницManette 4SNOthmanОценок пока нет
- Crankshaft - Install: Desmontagem e MontagemДокумент11 страницCrankshaft - Install: Desmontagem e MontagemTatiano BrolloОценок пока нет
- Big Twin or KitДокумент3 страницыBig Twin or Kitdesmodromik100% (1)
- Chevy Differentials: How to Rebuild the 10- and 12-BoltОт EverandChevy Differentials: How to Rebuild the 10- and 12-BoltРейтинг: 5 из 5 звезд5/5 (8)
- Micro Programmed ControlДокумент24 страницыMicro Programmed Controlapi-26870484100% (8)
- Steel MillsДокумент60 страницSteel MillsJulio CarbonettiОценок пока нет
- List of Instruments & EquipmentsДокумент1 страницаList of Instruments & EquipmentsRAHUL SINGHОценок пока нет
- Tapcon 230 Basic 6655745 ENДокумент1 страницаTapcon 230 Basic 6655745 ENPalash DahakeОценок пока нет
- HagglundsДокумент24 страницыHagglundserhansinattraОценок пока нет
- Boq 671963Документ7 страницBoq 671963Rahul GaurОценок пока нет
- B Ball Mill InspectionДокумент25 страницB Ball Mill InspectionJoel Miguel Angel Pacheco100% (1)
- PLC Siemens S7-200 Cpu 226Документ12 страницPLC Siemens S7-200 Cpu 226Yeimi Lorena Velasquez SosaОценок пока нет
- Hydraulic Power Units P 635: Instruction Manual For Rescue EquipmentДокумент68 страницHydraulic Power Units P 635: Instruction Manual For Rescue EquipmentForum PompieriiОценок пока нет
- 64 Triumph 650 CC Parts ManualДокумент77 страниц64 Triumph 650 CC Parts ManualScooterNutОценок пока нет
- Arduino Based Transformer ProtectionДокумент8 страницArduino Based Transformer ProtectionAbdullah MdОценок пока нет
- Electronics Project FinalДокумент45 страницElectronics Project Finalfiraol temesgenОценок пока нет
- Acs2000 PDFДокумент42 страницыAcs2000 PDFHans Morten100% (1)
- Interruptor GA Drawing - LTB145-TPO With FSAДокумент1 страницаInterruptor GA Drawing - LTB145-TPO With FSAMelvin Enoc Chavarría ZelayaОценок пока нет
- Template Transkrip 2020 ExcelДокумент2 страницыTemplate Transkrip 2020 Excelcornelius sotibinОценок пока нет
- Physics Project WorkДокумент15 страницPhysics Project WorkSidhant KaushikОценок пока нет
- 2081-0006 BatteriesДокумент4 страницы2081-0006 BatteriesMahmoud AhmedОценок пока нет
- NOTA DKB1022-K1 1.1-2 (2-4) DoneДокумент46 страницNOTA DKB1022-K1 1.1-2 (2-4) DoneMohdHaris Pelajar KVОценок пока нет
- ATmega 323Документ248 страницATmega 323SintherОценок пока нет
- Power Electronics - K.B Khanchandani PDFДокумент1 078 страницPower Electronics - K.B Khanchandani PDFChaitanya Shah75% (4)
- Microchip EepromДокумент44 страницыMicrochip EepromMoorthy VenkatachalamОценок пока нет
- 4 Watt Led Driver CircuitДокумент17 страниц4 Watt Led Driver CircuitNomade VoyageurОценок пока нет
- FOD3180 2A Output Current, High Speed MOSFET Gate Driver OptocouplerДокумент17 страницFOD3180 2A Output Current, High Speed MOSFET Gate Driver OptocouplerAliandoОценок пока нет
- Samsung LE32 B530Документ336 страницSamsung LE32 B530Adrian TruscaОценок пока нет
- Earthing System of Instrument EquipmentДокумент5 страницEarthing System of Instrument EquipmentMarko CetrovivcОценок пока нет
- Fail Safe Break & Break Motor: Presented byДокумент16 страницFail Safe Break & Break Motor: Presented byShubham GaikwadОценок пока нет
- S C Circuit Switchers Mark V Pre Insertion InductorsДокумент2 страницыS C Circuit Switchers Mark V Pre Insertion InductorsedgardОценок пока нет
- Standard Drawing For Piping ArrangementДокумент23 страницыStandard Drawing For Piping ArrangementEndra BudimansyahОценок пока нет
- Technical Data Sheet: CA-E5U7U7X65V-JS01Документ3 страницыTechnical Data Sheet: CA-E5U7U7X65V-JS01Pham DoОценок пока нет
- Tetra Conveyor Control System: Technical ManualДокумент152 страницыTetra Conveyor Control System: Technical ManualAlexandru Schengen DorinОценок пока нет