Вам также может понравиться
- Diseño de utillajes, matricería y prototipado con SolidWorksОт EverandDiseño de utillajes, matricería y prototipado con SolidWorksРейтинг: 3 из 5 звезд3/5 (1)
- Laboratorio 1 Diseño y Manufactura AsistidaДокумент39 страницLaboratorio 1 Diseño y Manufactura AsistidaCristian SumireОценок пока нет
- Diseño de Una Junta Unión de Ménsula A Una Columna García MéndezДокумент32 страницыDiseño de Una Junta Unión de Ménsula A Una Columna García MéndezLupita MéndezОценок пока нет
- DiseñoДокумент25 страницDiseñojosОценок пока нет
- Rodamientos 6003Документ8 страницRodamientos 6003Jose Sanchez RodriguezОценок пока нет
- Diseño de MaquinasДокумент18 страницDiseño de MaquinasMiguelОценок пока нет
- Rodamientos 6003: Análisis del proceso de fabricaciónДокумент17 страницRodamientos 6003: Análisis del proceso de fabricaciónJose Sanchez RodriguezОценок пока нет
- Tp2 Tecnologia DefinitivoДокумент21 страницаTp2 Tecnologia DefinitivoLUISSPERBERОценок пока нет
- Estructura MetalicaДокумент74 страницыEstructura MetalicaJeferson MataОценок пока нет
- AlcayataДокумент19 страницAlcayataoswaldomaynascondoriОценок пока нет
- Proyecto MatriceriaДокумент10 страницProyecto MatriceriaIsaac GutierrezОценок пока нет
- Diseño de Una Junta EmpernadaДокумент10 страницDiseño de Una Junta EmpernadaJimmy CansecoОценок пока нет
- Diseño de Troquel-Cuarto SemestreДокумент31 страницаDiseño de Troquel-Cuarto SemestreDavid BenavidesОценок пока нет
- Informe I - AplanadoraДокумент77 страницInforme I - AplanadoraAndrea NavarroОценок пока нет
- Proyecto Barra de TorsionДокумент25 страницProyecto Barra de TorsionTadeo Carrillo ParedesОценок пока нет
- Marco TeoricoДокумент11 страницMarco TeoricoMay FerОценок пока нет
- BaronДокумент9 страницBaronRonaldoОценок пока нет
- Torneado de Un EjeДокумент10 страницTorneado de Un EjeStalyn FloresОценок пока нет
- Proyecto de DiseñoДокумент8 страницProyecto de DiseñoJuan MoralesОценок пока нет
- Fabricacion de Una PoleaДокумент24 страницыFabricacion de Una PoleaJose Angel Chirguita67% (3)
- Calculo Del Eje de La RoladoraДокумент12 страницCalculo Del Eje de La RoladoraRicardo Vladimir50% (2)
- Plano Punzonadora de BalancinДокумент9 страницPlano Punzonadora de BalancinAndrea FiorellaОценок пока нет
- Pedro - Arancibia Tarea Semana 5Документ11 страницPedro - Arancibia Tarea Semana 5PedroОценок пока нет
- Mce Tótem Sodimac Rev AДокумент20 страницMce Tótem Sodimac Rev ARuperto BravoОценок пока нет
- TF CS5D Grupo9Документ26 страницTF CS5D Grupo9Fiorella Quispe VenturaОценок пока нет
- Vida Nueva: Instituto Superior TecnológicoДокумент30 страницVida Nueva: Instituto Superior TecnológicoDeivid B. CoronelОценок пока нет
- CilindradoДокумент14 страницCilindradoLuisGerard100% (1)
- Presentacion Final INMEДокумент36 страницPresentacion Final INMEXavier J. Aguilar GarcíaОценок пока нет
- AcmeДокумент16 страницAcmeOscar MaderaОценок пока нет
- Examen Final 2Документ15 страницExamen Final 2ivan olano benavidesОценок пока нет
- Resumen ProcesosДокумент19 страницResumen ProcesosLiiss CarranzaОценок пока нет
- Conformado de Chapa MetálicaДокумент5 страницConformado de Chapa Metálicaestiven ValderramaОценок пока нет
- Vaciado y alimentación de colada optimizadosДокумент20 страницVaciado y alimentación de colada optimizadosRicardo Deossa100% (1)
- Diseño y construcción de plataforma para industria lácteaДокумент10 страницDiseño y construcción de plataforma para industria lácteaCharly rule sОценок пока нет
- Clase 3 Uniones AtornilladasДокумент61 страницаClase 3 Uniones AtornilladasSanchez Cisneros RensoОценок пока нет
- Procesos Insutriales IДокумент10 страницProcesos Insutriales ICristian Andres Cardona RuizОценок пока нет
- Diseño Pit Final Lerchs y GrossmanДокумент26 страницDiseño Pit Final Lerchs y GrossmanGonzalo Muñoz Moreira100% (7)
- Taller de FundiciónДокумент8 страницTaller de Fundiciónsalma.penarandaОценок пока нет
- S12.s01 - Trabajo Final Dibujo Cad - Ejemplo de Bomba de EngranajeДокумент10 страницS12.s01 - Trabajo Final Dibujo Cad - Ejemplo de Bomba de EngranajeDavichín LCОценок пока нет
- Trabajo Tecnologia de Fabricacion MecanicaДокумент33 страницыTrabajo Tecnologia de Fabricacion MecanicaIrvin Aviador HerreroОценок пока нет
- Memoria de Cálculo Estructural de ColegioДокумент89 страницMemoria de Cálculo Estructural de ColegioJohn Steven Anaya InfantesОценок пока нет
- Aplicaciones de Mejora de Métodos de TrabajoДокумент5 страницAplicaciones de Mejora de Métodos de TrabajoOscar Pinto MendezОценок пока нет
- CHAVETASДокумент11 страницCHAVETASCarlos RamirezОценок пока нет
- Proy. Fabricacion de Briquetas Saigua Talavera CristhianДокумент73 страницыProy. Fabricacion de Briquetas Saigua Talavera CristhianRomario Ricardo Taboada VasquezОценок пока нет
- TR1 - Matem. Aplic. MetalДокумент12 страницTR1 - Matem. Aplic. MetalJosé Eduardo100% (4)
- Universidad Simón IДокумент107 страницUniversidad Simón IJhon Martinez CespedesОценок пока нет
- Fajas Tranportadoras 06 - 12 - 19Документ28 страницFajas Tranportadoras 06 - 12 - 19Gian MorenoОценок пока нет
- Tercera Practica Calificada de Diseño 2Документ6 страницTercera Practica Calificada de Diseño 2Jhon Choquehuanca BenegasОценок пока нет
- Avance de Trabajo Final de Dibujo CadДокумент21 страницаAvance de Trabajo Final de Dibujo CadLuman Torres Yauri100% (1)
- Informe Trabajo Aplicativo Final Grupo 5Документ15 страницInforme Trabajo Aplicativo Final Grupo 5Milesca ECОценок пока нет
- PROCESOS de MANUFACTURAavance Del Soporte para Brocas 1Документ8 страницPROCESOS de MANUFACTURAavance Del Soporte para Brocas 1Anibal Ømar Montiel QuispeОценок пока нет
- Diseño de losa y vigas de concretoДокумент22 страницыDiseño de losa y vigas de concretoDANIELA ROSA CUELLO GOMEZ (:-)Оценок пока нет
- Informe #7, Bautista Albornoz YaniraДокумент29 страницInforme #7, Bautista Albornoz YaniraYanira Bautista AlbornozОценок пока нет
- Proteus Labvier ArduinoДокумент7 страницProteus Labvier ArduinoSteven Mauricio ParedesОценок пока нет
- 6to Informe Torno - Dextre Guillen AlbertoДокумент26 страниц6to Informe Torno - Dextre Guillen AlbertoAlberto DextreОценок пока нет
- Entrega Completa Procesos IndustrialesДокумент3 страницыEntrega Completa Procesos IndustrialesNicolle PinzónОценок пока нет
- Fig. 1.-Estribos para ConstrucciónДокумент15 страницFig. 1.-Estribos para ConstrucciónCristian Ralph Lizana RiveraОценок пока нет
- Proyecto de Procesos II (Proceso Tecnológico de Maquinado para La Elaboración de Un Engranaje Helicoidal)Документ20 страницProyecto de Procesos II (Proceso Tecnológico de Maquinado para La Elaboración de Un Engranaje Helicoidal)Ander GarmendiaОценок пока нет
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- Sesión 4 Producción EsbeltaДокумент18 страницSesión 4 Producción EsbeltaluisОценок пока нет
- ACOSTAДокумент44 страницыACOSTAluisОценок пока нет
- Sesión 5 Producción Esbelta 5 S'sДокумент22 страницыSesión 5 Producción Esbelta 5 S'sluisОценок пока нет
- Introducción A La Producción Esbelta 1Документ21 страницаIntroducción A La Producción Esbelta 1luisОценок пока нет
- Meca QuedaДокумент6 страницMeca QuedaluisОценок пока нет
- Gestión residuos mercado impacto ambientalДокумент23 страницыGestión residuos mercado impacto ambientalluisОценок пока нет
- Producción Esbelta Kaizen I...Документ35 страницProducción Esbelta Kaizen I...luisОценок пока нет
- Simsi Sesion VibДокумент25 страницSimsi Sesion VibluisОценок пока нет
- DX LaredoДокумент84 страницыDX LaredoluisОценок пока нет
- Meca QuedaДокумент6 страницMeca QuedaluisОценок пока нет
- Proyecto Final Estadística Transporte de Trujillo - PerúДокумент63 страницыProyecto Final Estadística Transporte de Trujillo - PerúluisОценок пока нет
- Avon Products IncДокумент12 страницAvon Products IncluisОценок пока нет
- Un EmpresarioДокумент17 страницUn EmpresarioluisОценок пока нет
- Marketing LISTOДокумент4 страницыMarketing LISTOluisОценок пока нет
- Cap 5 Acero de RefuerzoДокумент10 страницCap 5 Acero de RefuerzoBelker008Оценок пока нет
- Actividad de Investigación Formativa #14 - Grupo 3 - PatologíasДокумент9 страницActividad de Investigación Formativa #14 - Grupo 3 - PatologíasBrayan Lenin Cupén GarcíaОценок пока нет
- Fabricacion Artesanal de CuchillosДокумент2 страницыFabricacion Artesanal de CuchillosSeba CabezaRapadaОценок пока нет
- Biomateriales Medio CursoДокумент9 страницBiomateriales Medio Cursogoku riveraОценок пока нет
- Sold1 Bases MetalúrgicasДокумент65 страницSold1 Bases MetalúrgicasVreyes1981Оценок пока нет
- Memoria Tecnica Rio PajanДокумент23 страницыMemoria Tecnica Rio PajanMishell SalazarОценок пока нет
- CONSERVA DE MANGO - Maquinaria 1Документ55 страницCONSERVA DE MANGO - Maquinaria 1Arturo Juarez100% (1)
- Práctica de SoldaduraДокумент3 страницыPráctica de SoldadurajulioОценок пока нет
- Lab. Suelos (Basico)Документ14 страницLab. Suelos (Basico)damc321Оценок пока нет
- GMA Garnet NewSteel - Malla 80Документ2 страницыGMA Garnet NewSteel - Malla 80Luz ArazolaОценок пока нет
- Informe N°03 Equipos Monofilo y Multifilo Solo Las Partes Del Torno y Taladro...Документ19 страницInforme N°03 Equipos Monofilo y Multifilo Solo Las Partes Del Torno y Taladro...luisОценок пока нет
- Propiedades Del Concreto Ing EnnioДокумент81 страницаPropiedades Del Concreto Ing EnnioJaime ALvites BarraganОценок пока нет
- Tesis Original PfleidererДокумент74 страницыTesis Original PfleidererJonathan Joel QuispeОценок пока нет
- Guía N°5 - Inestabilidad ElásticaДокумент4 страницыGuía N°5 - Inestabilidad ElásticaBastianBravo100% (1)
- Basf Manual Jun2012Документ308 страницBasf Manual Jun2012Marko AyalaОценок пока нет
- El Concreto en Climas FriosДокумент5 страницEl Concreto en Climas FriosPERCYYGNACIOОценок пока нет
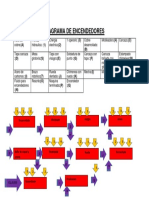
- Diagrama de EncendedoresДокумент1 страницаDiagrama de EncendedoresRichard DiazОценок пока нет
- PE-CON-CIV-07 - 0 Procedimiento para Colocacion de Anclas y Placas de AceroДокумент3 страницыPE-CON-CIV-07 - 0 Procedimiento para Colocacion de Anclas y Placas de AceroAlejandro Nieto100% (1)
- Instalación muros livianosДокумент28 страницInstalación muros livianossebastian bravoОценок пока нет
- Grupo #3 A 3ER Trabajo Resis 2Документ12 страницGrupo #3 A 3ER Trabajo Resis 2Aldo IdonawchОценок пока нет
- Actividad 5 (Geometría de Culata) Crispin Isidro Moreno GonzalezДокумент5 страницActividad 5 (Geometría de Culata) Crispin Isidro Moreno GonzalezCRISPIN ISIDRO MORENO GONZALEZОценок пока нет
- Diseño EstructuralДокумент16 страницDiseño EstructuraldayanaОценок пока нет
- Tarea de Ing - Materiales2 s11Документ6 страницTarea de Ing - Materiales2 s11Jesus Concha100% (1)
- EX5600-6ES Digital Only 16-01 PDFДокумент28 страницEX5600-6ES Digital Only 16-01 PDFchechar10Оценок пока нет
- 4.-Especificaciones Laguna de Oxidacion Castillo OkДокумент23 страницы4.-Especificaciones Laguna de Oxidacion Castillo OkKaren Rocio Llanos CenturionОценок пока нет
- Falsos Techos PDFДокумент5 страницFalsos Techos PDFmaruxdvalОценок пока нет
- MordazasДокумент8 страницMordazasDiego Pa ChОценок пока нет
- Criterio de diseño estructural para estanques atmosféricos de hormigón armado y acero de CodelcoДокумент80 страницCriterio de diseño estructural para estanques atmosféricos de hormigón armado y acero de CodelcoFer FerОценок пока нет
- Industria SiderúrgicaДокумент4 страницыIndustria SiderúrgicaLifeswolfs100% (1)
- Sistema de IzajeДокумент18 страницSistema de IzajeJose Armando Eccoña TelloОценок пока нет