Вам также может понравиться
- Pivot TableДокумент19 страницPivot TablePrince AroraОценок пока нет
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFДокумент1 092 страницыSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaОценок пока нет
- Oracle - Prep4sure.1z0 068.v2016!07!12.by - Lana.60qДокумент49 страницOracle - Prep4sure.1z0 068.v2016!07!12.by - Lana.60qLuis AlfredoОценок пока нет
- DC 7 BrochureДокумент4 страницыDC 7 Brochures_a_r_r_yОценок пока нет
- PR8451-Mechanics of MachinesДокумент70 страницPR8451-Mechanics of MachinesSSMIET DINDIGULОценок пока нет
- RTDM Admin Guide PDFДокумент498 страницRTDM Admin Guide PDFtemp100% (2)
- Functional DesignДокумент17 страницFunctional DesignRajivSharmaОценок пока нет
- Sindi and Wahab in 18th CenturyДокумент9 страницSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahОценок пока нет
- Lecture 21Документ38 страницLecture 21yakwetuОценок пока нет
- Grade 7 ExamДокумент3 страницыGrade 7 ExamMikko GomezОценок пока нет
- Basic ConceptsДокумент25 страницBasic ConceptsAslı ÇakırОценок пока нет
- Log Building News - Issue No. 76Документ32 страницыLog Building News - Issue No. 76ursindОценок пока нет
- Lyapunov Stability AnalysisДокумент17 страницLyapunov Stability AnalysisumeshgangwarОценок пока нет
- 268 - Non-Linear Systems by K. C. Bhuyan PDFДокумент35 страниц268 - Non-Linear Systems by K. C. Bhuyan PDFManika SahaОценок пока нет
- Lecture 2 Second Lecture 2023Документ21 страницаLecture 2 Second Lecture 2023yakwetuОценок пока нет
- Control Systems Lab #3: Stability AnalysisДокумент5 страницControl Systems Lab #3: Stability Analysisahmed shahОценок пока нет
- Nonlinear Control Systems - A Brief IntroductionДокумент9 страницNonlinear Control Systems - A Brief IntroductionSwapnil KanadeОценок пока нет
- Topic 2 Momentum Analysis of Flow SystemsДокумент38 страницTopic 2 Momentum Analysis of Flow Systemsethandleon4Оценок пока нет
- T3 - State Variable Models - 2021Документ40 страницT3 - State Variable Models - 2021James ChanОценок пока нет
- L05 Energy Band TheoryДокумент16 страницL05 Energy Band Theoryashish kumarОценок пока нет
- Part 2 State Space Control LTI Systems V3Документ60 страницPart 2 State Space Control LTI Systems V3cmrwarmyОценок пока нет
- Mass, Energy and Momentum BalancesДокумент10 страницMass, Energy and Momentum BalancesHaidee Ramos EdaОценок пока нет
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Документ29 страницRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoОценок пока нет
- Tutorial5 Controller Design Pole Placement SolДокумент13 страницTutorial5 Controller Design Pole Placement SolAnkur MondalОценок пока нет
- EEE 3153-Control System: Lecture On ControllersДокумент32 страницыEEE 3153-Control System: Lecture On ControllersShojeb ShojolОценок пока нет
- Control system-II: Department of Electrical EngineeringДокумент17 страницControl system-II: Department of Electrical Engineeringpala abishayОценок пока нет
- Week#06Документ39 страницWeek#06Yahya MateenОценок пока нет
- Machine Problem Contents PDF FreeДокумент23 страницыMachine Problem Contents PDF FreePedro Ian QuintanillaОценок пока нет
- Introduction To Quantum Mechanics - Lecture3 - DQHДокумент60 страницIntroduction To Quantum Mechanics - Lecture3 - DQHViệt Hoàng NguyễnОценок пока нет
- Nonlinear System DynamicsДокумент6 страницNonlinear System Dynamicsmostafa elazabОценок пока нет
- Nonlinear System Dynamics PDFДокумент6 страницNonlinear System Dynamics PDFmostafa elazabОценок пока нет
- Kathmandu University: School of EngineeringДокумент19 страницKathmandu University: School of EngineeringBishal LamichhaneОценок пока нет
- Mechanical Vibration (ME-411) : Week 05-06Документ44 страницыMechanical Vibration (ME-411) : Week 05-06Tariq AlamОценок пока нет
- ES 11 Formula Sheet v1Документ3 страницыES 11 Formula Sheet v1Sam RuelosОценок пока нет
- Chapter1 - Mechanical VibrationДокумент8 страницChapter1 - Mechanical VibrationGaming KheirОценок пока нет
- Stability: EE-601 Linear System TheoryДокумент37 страницStability: EE-601 Linear System TheorysunilsahadevanОценок пока нет
- Module 4-Part 1Документ15 страницModule 4-Part 1Muhammad FahimОценок пока нет
- Exp 5-7Документ10 страницExp 5-7abdul rehmanОценок пока нет
- T5 - Stability and Steady State Error - 2021Документ43 страницыT5 - Stability and Steady State Error - 2021James ChanОценок пока нет
- Review of QMДокумент36 страницReview of QMRustin PurplemanОценок пока нет
- Chapter 2-1 PDFДокумент70 страницChapter 2-1 PDFtazeb100% (2)
- Week 7A - Online Classes - S2020Документ16 страницWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiОценок пока нет
- Modeling of Basic SystemsДокумент46 страницModeling of Basic SystemsAbhinav ReddyОценок пока нет
- Stability: EE-601 Linear System TheoryДокумент18 страницStability: EE-601 Linear System TheorysunilsahadevanОценок пока нет
- Linear Momentum and CollisionsДокумент2 страницыLinear Momentum and CollisionsAlex HuynhОценок пока нет
- Time Response AnalysisДокумент51 страницаTime Response AnalysisAbdulrahmanОценок пока нет
- Hafta.Документ39 страницHafta.badurlar890Оценок пока нет
- LIC Exp5 (E)Документ2 страницыLIC Exp5 (E)astrophypiОценок пока нет
- Control Lec 1Документ28 страницControl Lec 1Mhabad ZebariОценок пока нет
- Lecture #2 RCДокумент36 страницLecture #2 RCKiraОценок пока нет
- Week 6 - Fluid MechanicsДокумент24 страницыWeek 6 - Fluid MechanicsHaze BlehОценок пока нет
- Reactions 2Документ7 страницReactions 2Josephine ChenОценок пока нет
- Lec8 SMДокумент15 страницLec8 SMSwagat PradhanОценок пока нет
- SmalloscillationsДокумент12 страницSmalloscillationsrajbaxeОценок пока нет
- Natural Response Neither Grows Nor Approaches Zero As Time (ForДокумент9 страницNatural Response Neither Grows Nor Approaches Zero As Time (ForAditya PrakashОценок пока нет
- Lecture IntegralAnalysis 2-17-18oct2022Документ21 страницаLecture IntegralAnalysis 2-17-18oct2022Riddhiman GhatakОценок пока нет
- 241 CH2Документ24 страницы241 CH2talal.saadaaОценок пока нет
- VD Cls NotesДокумент56 страницVD Cls NotesAzhagiriОценок пока нет
- Lecture 2Документ43 страницыLecture 2Dimuth S. PeirisОценок пока нет
- Chapter 4Документ142 страницыChapter 4socieva1973Оценок пока нет
- Nonlinear System Analysis and ControlДокумент88 страницNonlinear System Analysis and ControlElvis TsangОценок пока нет
- Control+Systems Transient+Performance ( ( (3) ) )Документ13 страницControl+Systems Transient+Performance ( ( (3) ) )عبدالرحمن عطاريОценок пока нет
- Steady State Error Analysis With Unit Step and Ramp Input SignalДокумент15 страницSteady State Error Analysis With Unit Step and Ramp Input SignalyasinОценок пока нет
- Damped SHMДокумент13 страницDamped SHMM TahirОценок пока нет
- AdvHyd06 FluidDynamicsДокумент20 страницAdvHyd06 FluidDynamicsAminu AliyuОценок пока нет
- Path Planning and Obstacle Avoidance Based On Shortest Distance AlgorithmДокумент7 страницPath Planning and Obstacle Avoidance Based On Shortest Distance AlgorithmMeenakshi VenkataramanОценок пока нет
- Computer Codes For Quine-Mcclusky (QM) Minimization Method: Three Variable ProblemДокумент4 страницыComputer Codes For Quine-Mcclusky (QM) Minimization Method: Three Variable ProblemMeenakshi VenkataramanОценок пока нет
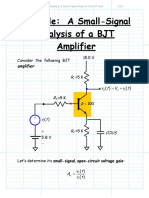
- 08 BJT ModelДокумент10 страниц08 BJT ModelMeenakshi VenkataramanОценок пока нет
- Lectronic Evices: FloydДокумент6 страницLectronic Evices: FloydMeenakshi VenkataramanОценок пока нет
- 11 Biology Notes ch05 Morphology of Flowering Plants PDFДокумент7 страниц11 Biology Notes ch05 Morphology of Flowering Plants PDFMeenakshi VenkataramanОценок пока нет
- Chemical KineticsДокумент73 страницыChemical KineticsMeenakshi VenkataramanОценок пока нет
- 12 Biology Notes Ch15 Biodiversity and ConservationДокумент4 страницы12 Biology Notes Ch15 Biodiversity and ConservationMeenakshi VenkataramanОценок пока нет
- Heredity and EvolutionДокумент4 страницыHeredity and EvolutionMeenakshi VenkataramanОценок пока нет
- Specificities of The Terminology in AfricaДокумент2 страницыSpecificities of The Terminology in Africapaddy100% (1)
- Hole CapacityДокумент2 страницыHole CapacityAbdul Hameed OmarОценок пока нет
- Linguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowДокумент2 страницыLinguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowMonette Rivera Villanueva100% (1)
- Report On GDP of Top 6 Countries.: Submitted To: Prof. Sunil MadanДокумент5 страницReport On GDP of Top 6 Countries.: Submitted To: Prof. Sunil MadanAbdullah JamalОценок пока нет
- Financial Accounting 2 SummaryДокумент10 страницFinancial Accounting 2 SummaryChoong Xin WeiОценок пока нет
- 11-03 TB Value Chains and BPs - WolfДокумент3 страницы11-03 TB Value Chains and BPs - WolfPrakash PandeyОценок пока нет
- Appendix - Pcmc2Документ8 страницAppendix - Pcmc2Siva PОценок пока нет
- The Doshas in A Nutshell - : Vata Pitta KaphaДокумент1 страницаThe Doshas in A Nutshell - : Vata Pitta KaphaCheryl LynnОценок пока нет
- Networker Performance Tuning PDFДокумент49 страницNetworker Performance Tuning PDFHarry SharmaОценок пока нет
- The Homework Song FunnyДокумент5 страницThe Homework Song Funnyers57e8s100% (1)
- Harper Independent Distributor Tri FoldДокумент2 страницыHarper Independent Distributor Tri FoldYipper ShnipperОценок пока нет
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaДокумент25 страницDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaОценок пока нет
- Lecture 4 ENGR 243 DynamicsДокумент45 страницLecture 4 ENGR 243 DynamicsRobby RebolledoОценок пока нет
- Digital MetersДокумент47 страницDigital MetersherovhungОценок пока нет
- Task 3 - LPДокумент21 страницаTask 3 - LPTan S YeeОценок пока нет
- Parliament of India: Rajya SabhaДокумент64 страницыParliament of India: Rajya SabhaSivapothuraju KonathalaОценок пока нет
- RSA - Brand - Guidelines - 2019 2Документ79 страницRSA - Brand - Guidelines - 2019 2Gigi's DelightОценок пока нет
- Movie Piracy in Ethiopian CinemaДокумент22 страницыMovie Piracy in Ethiopian CinemaBehailu Shiferaw MihireteОценок пока нет
- CX Programmer Operation ManualДокумент536 страницCX Programmer Operation ManualVefik KaraegeОценок пока нет
- Lec 33 - Householder MethodДокумент11 страницLec 33 - Householder MethodMudit SinhaОценок пока нет
- The Use of Air Cooled Heat Exchangers in Mechanical Seal Piping Plans - SnyderДокумент7 страницThe Use of Air Cooled Heat Exchangers in Mechanical Seal Piping Plans - SnyderJaime Ocampo SalgadoОценок пока нет