Академический Документы
Профессиональный Документы
Культура Документы
Auto Matos
Загружено:
francisco1fernand-11Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Auto Matos
Загружено:
francisco1fernand-11Авторское право:
Доступные форматы
AUTOMATOS
Formador: Nelson Ornelas
Compilação de Manual OMRON
AUTOMAÇÃO INDUSTRIAL
A automação industrial, é a substituição de algumas acções humanas por mecanismos
que podem trabalhar isoladamente ou em conjunto, movidos por uma fonte de energia externa
e com a capacidade de realizar ciclos de operações que se podem repetir indefinidamente.
TÉCNICAS DE AUTOMATIZAÇÃO
Dependendo da natureza do automatismo em questão, pode falar-se de várias
técnicas de automação:
Mecânica
Pneumática
Hidráulica
Eléctrica
Electrónica
AUTOMATIZAÇÃO MECÂNICA
Existe uma grande quantidade e variedade de automatismos mecânicos na industria
(tornos, fresadoras, motores de combustão interna, etc.). Não esquecer que esta técnica
contribuiu em muito com a revolução industrial.
AUTOMATIZAÇÃO PNEUMÁTICA
Esta técnica tem uma infinidade de aplicações, especialmente em trabalhos de fixação
de peças, movimento linear, máquinas ferramenta, etc.
Destaca-se nesta técnica a economia uma vez instalados e a rapidez dos
movimentos.
AUTOMATIZAÇÃO HIDRÁULICA
Idêntico ao funcionamento pneumático, mas mais lento, no entanto consegue
desenvolver mais trabalho.
Tipicamente encontra-se em prensas, e diversas máquinas ferramenta.
AUTOMATIZAÇÃO ELÉCTRICA
Qualquer máquina por simples que seja, tem de alguma forma esta técnica aplicada.
No entanto a lógica cablada tem vindo consideravelmente a ser substituída
pela automatização electrónica.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 2 de 49
AUTOMATIZAÇÃO ELECTRÓNICA
O avanço tecnológico dos sistemas digitais, permitiram revolucionar os
microprocessadores e naturalmente os autómatos programáveis.
A chegada da electrónica à industria foi uma perfeita revolução. Permitiu à
automação industrial dar uma passo gigante.
A tecnologia electrónica pode ser implementada através dos seguintes
elementos:
Circuitos electrónicos dedicados
Sistemas electrónicos standard (ex.:controlo numérico)
Autómatos programáveis
Micro e minicomputadores
AUTÓMATO PROGRAMÁVEL
VANTAGENS
Sobre a tecnologia cablada, o autómato programável tem inúmeras vantagens. A
destacar:
É muito mais fiável, pois o número de componentes mecânicos e de
ligações é mínimo.
O desenvolvimento do programa pode ser feito em paralelo com a
montagem dos equipamentos. O sistema por lógica cablada, só pode ser
montado depois do projecto estar completamente concluído.
As alterações do automatismo só implicam alterações no programa.
Na lógica cablada, qualquer alteração implica a alteração da
cablagem e dos componentes.
O espaço ocupado pelo autómato é constante e independente da
complexidade da lógica do automatismo.
Não requer stocks de equipamento de reserva tão elevados como
nos sistemas por lógica cablada.
Sobre os sistemas controlados por microprocessador ou micro-computador, o
autómato não requer a presença de um perito em informática ou em assembler para programar
ou alterar um programa.
A linguagem utilizada é standard e pode ser facilmente apreendida por
pessoas com uma formação mínima.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 3 de 49
CLASSIFICAÇÃO
Pode classificar-se a utilização dos autómatos programáveis em três classes:
Controlo de máquinas ou automatismos simples e
individualizados.
Controlo e sincronização de diversas máquinas ou automatismos
de uma linha de fabrico ou de um sistema complexo.
Supervisão e controlo de uma unidade fabrico ou de um conjunto
de subsistemas que podem eles mesmos serem também
controlados por autómatos.
São hoje inúmeros os fabricantes de autómatos programáveis.
No mercado português são cerca de 30 as marcas presentes, encontrando- se por isso,
uma grande diversidade de modelos.
ESTRUTURA DE UM AUTOMATISMO
Geralmente na sua forma mais simples, pode considerar-se um sistema
automatizado constituído por dois grandes grupos:
Parte operativa
Parte de comando
PARTE OPERATIVA
Designamos por parte operativa a máquina propriamente dita.
A parte operativa é responsável por efectuar operações, como
consequência das ordens recebidas da parte de comando.
Tem também a função de informar a parte de comando, do estado das
operações em curso.
A parte operativa é o sistema físico que se pretende automatizar.
PARTE DE COMANDO
É o automatismo responsável por dar as ordens de saída em função do
seu programa e das informações fornecidas pela parte operativa.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 4 de 49
CARACTERÍSTICAS DE UM AUTOMATISMO
É já difícil imaginar a nossa vida sem automatismos. A sua presença entrou de tal
forma nos nossos hábitos, que muitas vezes nem damos conta de como nos facilitam a vida;
eles estão presentes no controlo da luz da escada, no elevador, no portão de garagem, na
máquina de lavar roupa, no sistema de bombagem de água e em muitos mais dispositivos de
uso comum.
Na verdade, os automatismos, são dispositivos que permitem que determinado sistema
funcione de uma forma autónoma (automaticamente), sendo a intervenção do operador
reduzida ao mínimo indispensável.
Sendo bem concebido, um automatismo :
Simplifica consideravelmente o trabalho do operador.
Elimina ao operador as tarefas complexas, perigosas, pesadas ou
indesejadas.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 5 de 49
Quando o automatismo é aplicado a um processo industrial, também tem as seguintes
vantagens :
Facilita as alterações aos processos de fabrico.
Melhora a qualidade dos produtos fabricados, mantendo uma
constância das características dos mesmos.
Aumenta a produção
Permite economizar matéria prima e energia.
Aumenta a segurança no trabalho.
Controla e protege os sistemas controlados.
ESTRUTURA DE UM AUTOMATISMO
Podemos dividir um automatismo em três blocos:
ENTRADAS LÓGICA SAÍDAS
S
ENTRADAS
Neste bloco encontram-se todos os dispositivos que recebem informações do
sistema a controlar. São em geral sensores, botoneiras, comutadores, fins de curso, etc.
SAÍDAS
Neste bloco temos todos os dispositivos actuadores e sinalizadores. Podem ser
motores, válvulas, lâmpadas, displays, etc..
LÓGICA
Neste bloco encontra-se toda a lógica que vai permitir actuar o bloco de saídas em
função dos dados recebidos pelo bloco de entradas. É este bloco que define as características
de funcionamento do automatismo. Pode ser constituído por relés, temporizadores,
contadores, módulos electrónicos, lógica pneumática, electrónica programada, etc..
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 6 de 49
Podemos ainda definir como parte de controlo, o conjunto dos blocos de entradas
e de lógica.
O bloco de saídas será a parte operativa.
Exemplo
Automatismo de porta
Numa porta automática, o motor que acciona a abertura e fecho da mesma,
constitui a parte operativa.
O sensor de proximidade, os fins-de-curso, a chave de permissão e
toda a lógica de exploração, constituem a parte de controlo OU comando.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 7 de 49
IMPLEMENTAÇÃO DE UM AUTOMATISMO
A realização de um automatismo deve iniciar-se pela especificação do mesmo a
três níveis:
ESPECIFICAÇÕES FUNCIONAIS
Visa-se com estas especificações, detalhar todo o funcionamento do sistema a
automatizar. Nesta descrição deve pormenorizar-se toda a lógica que vai permitir a correcta
exploração do sistema.
Voltando ao exemplo da porta automática, a especificação funcional poderia ser:
* Pretende-se que o automatismo de exploração deste sistema, permita comandar a
abertura e fecho de uma porta de acesso.
O comando poderá ser automático ou manual. Para o efeito, existirá no frontal do
quadro de comando, um comutador de duas posições para a selecção do modo.
O modo manual usa duas botoneiras que permitirão respectivamente abrir e fechar a
porta. Uma vez premida a botoneira de abertura, a porta abrir-se-á até que seja atingido
um fim de curso que detecta o limite de abertura da mesma. Premindo a botoneira de fecho,
a porta fechar-se-á até que seja premido um outro fim de curso que detecta o fecho.
O modo automático faz uso de dois sensores que detectam a proximidade de uma
pessoa. Quando um deles é activado inicia-se a abertura da porta. Esta permanece aberta
até que tenha passado um tempo que pode ir de 5 até 20 segundos, após o desaparecimento
do sinal proveniente dos sensores de proximidade. Findo este tempo, a porta inicia o
fecho. Se durante o fecho, o sensor de proximidade detectar a presença de uma pessoa,
deverá interromper a operação e abrir de novo a porta.
ESPECIFICAÇÕES TECNOLÓGICAS
Com estas especificações, descreve-se o ambiente em que o sistema vai operar, assim
como as características que os equipamentos a integrar deverão possuir, de forma a permitirem
o perfeito desempenho do automatismo.
Concretizando com o exemplo anterior, poderia especificar-se:
* O sensor que detecta a proximidade de uma pessoa, deverá ser um modelo para
ser montado sobre a porta (um no interior e outro no exterior) e deverá ser de
infravermelhos passivo, com saída por transístor. A sua sensibilidade deverá ser tal,
que a saída deste só active quando estiver uma pessoa a menos de 2 metros da porta. O
motor que acciona a abertura e fecho da porta, será eléctrico, trifásico, ..,etc.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 8 de 49
ESPECIFICAÇÕES OPERATIVAS
Dizem respeito à fiabilidade, segurança, disponibilidade, flexibilidade, manutenção,
diálogo homem máquina, etc.
Voltando ao exemplo anterior poderia especificar-se neste ponto:
* O comutador automático/manual deverá ser um modelo com chave. Deverá existir
um contador de operações de abertura e fecho da porta, de forma a identificar o momento
das operações de manutenção que deverão efectuar-se de
10.000 em 10.000 manobras...etc.
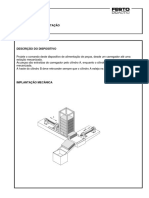
A realização de um
automatismo, implica a
execução de uma série de
tarefas interdependentes. A
presente figura mostra a
sequência de operações
necessárias à implementação
de um automatismo.
OPÇÕES TECNOLÓGICAS
São várias as opções tecnológicas disponíveis. Não se pode à partida dizer qual a
melhor e pior, pois esta opção depende de várias condicionantes:
Número de sistemas a automatizar
Ambiente de trabalho
Tipo de sinais de entrada/saída
Função predominante
Actuadores predominantes
Outra das condicionantes que deve estar sempre presente é a relação
preço/performance. Uma determinada solução pode ser perfeita sob o ponto de vista
puramente técnico, mas inviável sob o ponto de vista financeiro.
Ao nível das características de implementação, podemos definir dois grandes
grupos :
Lógica cablada
Lógica programada
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 9 de 49
Na lógica cablada, o desempenho do automatismo é definido pela interligação física
de elementos discretos. A alteração do processo, normalmente implica refazer a cablagem.
Como exemplo, podemos referir um circuito eléctrico, composto por relés, relés biestáveis,
temporizadores, etc..
Na lógica programada, o desempenho do automatismo é definido por uma série de
instruções ou códigos que são programados no suporte de memória do sistema. Ao conjunto de
instruções que definem o automatismo, chama-se programa. A alteração da lógica do
processo a controlar apenas implica a alteração do programa. Como exemplo, temos o
controlo numérico, autómato programável, micro-computador, etc..
MÉTODOS GRÁFICOS PARA A DESCRIÇÃO DA LÓGICA DE UM AUTOMATISMO
Ao nível das especificações funcionais, é possível traduzir numa linguagem gráfica
toda a estrutura lógica do automatismo. Seguidamente apresentam-se algumas das mais usadas:
DIAGRAMA DE CONTACTOS (LADDER)
Este método de representação, implementa a sequência lógica usando contactos
colocados em série e paralelo, tal como num esquema eléctrico.
O símbolo de contacto é ligeiramente alterado, como se poderá ver nas
figuras abaixo.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 10 de 49
DIAGRAMA LÓGICO (LOGIGRAMA)
Esta representação do automatismo, implementa a lógica, usando circuitos lógicos
"E" e "OU".
Para representar o mesmo circuito do exemplo anterior, teríamos:
GRAFCET
GRAFCET é uma linguagem gráfica, especialmente desenhada para máquinas
e processos sequenciais.
O que é um automatismo ?
Automatismo é todo o dispositivo eléctrico, electrónico, pneumático ou hidráulico capaz de por si
só controlar o funcionamento de uma máquina ou processo.
Exemplos de automatismos: escadas rolantes, elevadores, portas automáticas, semáforos, linhas de
montagem das fábricas, etc.
Estrutura geral de um automatismo.
Rede de distribuição (ac trifásica, ac monofásica, dc…)
Parte Operativa Engenho ou máquina (elevador, semáforo, escada rolante…)
Accionadores (motores, lâmpadas, resistências…)
Detectores (fins de curso, detectores de proximidade, células
fotoeléctricas…)
Tratamento de dados (autómatos programáveis, contactores
Parte Comando auxiliares…)
Diálogo Homem – Máquina (botoneiras, sinalizadores,
teclados…)
Comando de potência ou pré-accionadores (contactores
electromagnéticos, relés…)
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 11 de 49
Analogia com um veículo automóvel.
Comparemos um automatismo com um automóvel.
Automóvel Automatismo
Veículo Máquina ou instalação
Olho do condutor Detector, captador de informações
Pedal acelerador Comando de potência, contactor
Motor Accionador
Combustível Energia, alimentação
Cérebro do condutor Sistema de tratamento, cálculo, decisão
Painel de instrumentos Diálogo Homem – máquina, visualização
Exemplos de constituintes de automatismos
Instalação Uma cisterna
Detectores
Sensores fotoeléctricos
Actuador Motor
Comando de Contactor
potência
Sistema de Autómato
processamento programável
Visualização Consola HMI
(Interface Homem – máquina)
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 12 de 49
A máquina ou a instalação
É o sistema que deve ser automatizado. Este sistema pode ser muito complexo como uma cadeia de
fabrico, uma unidade de produção ou uma fábrica.
É igualmente possível automatizar os equipamentos mais simples como os semáforos, um portão de
garagem, uma piscina ou um sistema de irrigação.
Os sensores
Como o olho de um automobilista, um sistema automatizado deve possuir equipamentos que darão
as informações sobre o seu ambiente. São os sensores:
• Sensores de nível
• Sensores de temperatura
• Sensores de passagem
Por exemplo, para a detecção de um automóvel numa portagem de auto-estrada, utilizaremos um
sensor fotoeléctrico.
Os actuadores
Os actuadores permitem efectuar as acções no sistema.
São as bombas, os cilindros, os motores...
O comando de potência ou pré-actuadores
Para transmitir a energia necessária aos actuadores e servir de intermediário com o sistema de
tratamento de dados, são necessários equipamentos específicos, que são os sistemas de comando de
potência: contactores, disjuntores, relés...
Os sistemas de tratamento de dados
O cérebro da instalação é o sistema de tratamento de dados.
Depois de realizado com a ajuda de relés e de contactores auxiliares, ele é agora composto de
autómatos programáveis.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 13 de 49
O diálogo Homem/Máquina
Todo o sistema automatizado deve ser vigiado ou controlado pelo homem.
Para isso são necessários equipamentos tais como:
• Os botões
• Os terminais de diálogo
• Os ecrãs
Tecnologia cablada ou programada
Características da tecnologia cablada
O funcionamento da instalação é definido pela cablagem entre os diferentes constituintes (relés,
temporizadores, relógios...).
Quanto mais complexa for a instalação, mais complexa é a cablagem.
Para cada modificação de funcionamento, é necessário modificar a cablagem o que acarreta a
paragem do processo de fabrico.
Características da tecnologia programada
O funcionamento da instalação é definido por um programa executado de maneira cíclica por um
autómato programável.
Para cada modificação de funcionamento, basta modificar o programa. Não é necessário cablar uma
nova temporização ou um novo relé auxiliar, é um programa que o substitui. Desta forma, a
flexibilidade é grande e o custo final é baixo.
Um só aparelho (PLC), sem cablagem entre os módulos, unicamente a ligação aos sensores
(entradas do autómato), aos accionadores (saídas do autómato) e à alimentação.
Vantagens da tecnologia programada
Menos constituintes: O autómato programável substitui todos os relés auxiliares, os
temporizadores ou os relógios: importante ganho de volume mas também mais fiabilidade pois não
há peças mecânicas no cérebro do automatismo.
As únicas ligações são: a alimentação do autómato, os sensores e os accionadores.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 14 de 49
Mais flexibilidade: O programa é uma sucessão de instruções que se pode escrever e modificar
facilmente com a ajuda de um terminal de programação. Pode mesmo duplicar o programa
facilmente se precisar de realizar automatismos idênticos.
Mais fácil de testar e de reparar: Na face frontal do autómato geralmente encontram-se
sinalizadores luminosos que sinalizam: o estado de funcionamento dos sensores (abertos ou
fechados), o estado dos accionadores (em serviço ou parados), o estado de funcionamento do
autómato.
O Autómato
O autómato programável (AP) ou Controlador Lógico Programável (Programmable Logic
Controller – PLC) utiliza-se no comando de circuitos de automatismos.
É um equipamento electrónico, programado pelo utilizador, com funcionamento cíclico.
Há autómatos compactos (integram no mesmo bloco todos os elementos necessários ao seu
funcionamento) e autómatos modulares (são constituídos por diversos módulos que se associam
de forma a obter a configuração ideal para cada aplicação).
Estrutura de um autómato programável
Programação
Dados dos sensores
Dados para os actuadores
O bus serve para fazer a comunicação entre todas as partes no seu conjunto. É a ferramenta de
diálogo interno do autómato.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 15 de 49
A unidade central ou processador
A unidade central chamada também de processador constitui o cérebro do autómato.
É ela que:
• Lê os valores dos sensores.
• Executa o programa com os dados contidos na memória.
• Escreve as saídas ligadas aos accionadores.
A memória
A memória do autómato contém o programa a executar mas também os dados utilizados por esse
programa (valores de temporizadores, monoestáveis, contadores...).
É o local onde são armazenadas todas as informações contidas no autómato. Sem memória, um
autómato não pode funcionar.
Programação
Dados dos sensores
Dados para os actuadores
A interface entrada/saída
A interface entrada/saída permite não só transferir para o autómato o estado dos sensores, mas
também enviar as ordens para os accionadores, por exemplo os relés, os contactores...
A alimentação
Os autómatos podem ser alimentados a 24Vdc ou 230Vac. Quando são alimentados a 24Vdc a fonte
e alimentação é externa. Quando a alimentação é de 230Vac são ligados directamente à rede
eléctrica e têm uma fonte de alimentação interna
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 16 de 49
O módulo de comunicação
O autómato constitui o cérebro do automatismo, ele contém um programa que descreve as acções a
efectuar.
Esse programa realizado no computador, deve ser transferido para o autómato, é o trabalho deste
módulo. Nalguns autómatos o módulo de comunicação é interno, ele só é visível pelo seu ligador.
Bits e Words
Um bit é a zona em memória que pode ter dois valores: 0 ou 1.
Uma word é a zona em memória que contêm um valor numérico.
Ela é utilizada para reter uma duração de temporização, um valor de contagem...
A memória do autómato pode conter dados ou um programa.
Ela pode ser de dois tipos: RAM ou ROM. A memória RAM pode ser escrita ou lida, a memória
ROM só pode ser lida.
As entradas e saídas constituem as ligações físicas do autómato com o exterior. Para nós, são
simples terminais de ligação mas para o autómato, é um sistema que:
Transforma um sinal eléctrico num estado lógico (0 ou 1) para as entradas.
Transforma um estado lógico (0 ou 1) num sinal eléctrico para as saídas.
Funcionamento do autómato
SENSORES PROCESSO ACTUADORES
AUTÓMATO
Variáveis externas Variáveis externas
de entrada PROGRAMÁVEL de saída
(digitais ou analógicas) (digitais ou analógicas)
Variáveis internas
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 17 de 49
Os sinais que o autómato recebe dos sensores, que fornecem as informações ao programa chamam-
se variáveis externas de entrada.
Os sinais que o autómato fornece aos actuadores, que actuam sobre a parte operativa da instalação
denominam-se variáveis externas de saída.
Os sinais que o autómato utiliza como resultado das operações aritméticas e lógicas efectuadas pelo
programa, chamam-se variáveis internas.
Digitais Analógicas
tudo ou nada
(1 ou 0, ligado ou (a variação é contínua)
desligado)
Variáveis externas Parte de comando Parte de comando
por exemplo um por exemplo o valor
de entrada interruptor de fim de fornecido por um sensor de
curso. temperatura.
Variáveis externas Parte de potência Parte de potência
por exemplo um motor por exemplo a regulação da
de saída eléctrico. velocidade de um motor.
O que é um ciclo de programa?
Logo que executamos um programa, o autómato vai efectuar ciclicamente estas três fases:
Fase 1: Leitura do estado das entradas
Fase 2: Execução do programa
Fase 3: Activação ou desactivação das saídas
Ao terminar a Fase 3, o autómato volta à Fase 1 e assim sucessivamente.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 18 de 49
O tempo de ciclo (scan) de um autómato, com leitura cíclica, corresponde ao tempo decorrido entre
a leitura das entradas e a actualização das saídas.
O que é um programa?
Um programa é uma sucessão ordenada de instruções (numa linguagem que o autómato entenda)
que indicam ao processador as operações a efectuar.
Cada fabricante de autómatos utiliza as suas mnemónicas (abreviaturas das palavras que designam
as instruções).
Esquema eléctrico Exemplo de programa
Ler o estado de a
a
a ss Ler o estado de b
Se a ou b fechar então acende s
bb Se não apagar s
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 19 de 49
O que é a linguagem de programação?
O programa que vimos anteriormente deve ser escrito numa linguagem compreensível para o
processador, é a linguagem de programação.
A linguagem de programação é uma linguagem reconhecida pelo processador do autómato graças à
qual são descritas as instruções a efectuar.
Linguagens de programação mais utilizadas:
• Linguagem em lista de instruções (Instruction List – IL).
• Linguagem em diagrama de contactos (Ladder Diagram – LD)
A linguagem lista de instruções
Linguagem que consiste num conjunto de instruções representadas por mnemónicas (abreviaturas
das palavras que designam as instruções), que indicam as operações que o programa deve executar.
a s
Exemplo:
b
s=a+b
Linha de programa Programa Instrução Mnemónica Operando
Linha 0 LD a Load LD a (variável de entrada)
Linha 1 OR b OU OR b (variável de entrada)
Linha 2 ST s Store ST s (variável de saída)
As variáveis de entrada “a”, “b” e de saída “s” serão substituídas pelos códigos referentes às
entradas e saídas dos respectivos autómatos.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 20 de 49
A linguagem de contactos
Antes da tecnologia programada, existia (e ainda existe) a tecnologia cablada. Para que a mudança
entre estas duas tecnologias fosse o menos complicada possível, foi criada uma linguagem próxima
da cablagem eléctrica. Trata-se da linguagem de contactos.
A linguagem de contactos gráficos é composta de contactos, de bobines e de ligações entre esses
elementos.
Circuito eléctrico Diagrama de contactos
Representam condições Contacto
lógicas de entrada aberto
Contacto
fechado
Representam condições Bobina
lógicas de saída
Exemplo de linguagem de contactos
Eis um exemplo simples de linguagem de contactos. As duas entradas do autómato ligadas sobre o
botão a e b comandam a lâmpada ligada sobre uma saída s do autómato.
A linguagem de programação, linguagem de contactos, é a imagem de um esquema eléctrico.
Linguagem de
Esquema eléctrico Programa
contactos
Ler o estado de a Programar o
aa s
Ler o estado de b autómato
bb Se a ou b fechar então
acende s
Se não apaga s
O computador é actualmente a forma mais utilizada para programar o autómato.
Utilizando o computador, os autómatos podem ser geralmente programados em diagrama de
contactos ou em lista de instruções.
Para esse efeito é necessário o software de programação e um cabo de comunicação para ligar o
autómato ao computador. O software encarrega-se de efectuar a conversão da linguagem de
contacto para a linguagem lista de instruções e vice-versa.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 21 de 49
Endereçamentos dos Autómatos da Família CP1L …
Areas de Memória Canais Bit’s Função
Associado CIO 000 ao CIO 0099 CIO 000.00 / CIO 099.15 LEITURA/ESCRITA
aos Input’s 100 canais 1600 Bit’s Estes bit’s e canais
estão directamente
Associado CIO 0100 ao CIO 0190 CIO 100.00 / CIO 199.15
ligados aos terminais
aos Output’s 100 canais 1600 Bit’s
externos
Area CIO 3000 ao CIO 3063 CIO 3000.00 / CIO 3063.15
Conexão 1:1
64 Canais 1024 Bit’s
CIO Ligação série
a PLC CIO 3100 a CIO 3189 CIO 3100.00 / CIO 3189.15
(Serial PLC 90 canais 1440 Bit’s
Link Area)
Livres para CIO 3800 ao CIO 6143 CIO 3800.00 / CIO 6143.15
LEITURA/ESCRITA
uso 58 canais 14400 Bit’s
Estão livres para serem
W 000 ao W 511 W 000.00 / W 511.15
Area W (Work Area) usados no programa
512 canais 8192 Bit’s
SÓ LEITURA
Bit’s com funções
CF000_CF114
Area CF 18 Bit’s especiais;
Bit’s Pulsantes;
Etc.
LEITURA/ESCRITA
TR 0 ao TR 15 Bit’s temporários –
Area TR
16 Bit’s memórias de secções do
programa
LEITURA/ESCRITA
H 00 ao H 511 H 000.00 / H 511.15 O mesmo que a CIO’s
Area H
512 canais 8192 Bit’s mas retêm estado em
falha de alimentação
SÓ LEITURA
A 000 ao A 959 A 000 ao A 477 Bit’s com funções
Area AR
960 canais A 478 ao A 960 especiais,( RTC por
exemplo)
TK 0 a TK 31
Area Tarefas (Task)
32 Bit’s
LEITURA/ESCRITA
Registos Indexados IR 0 a IR 15
Activação de tarefas
IR 16 Bit’s
ciclicas
Registos de Dados DR 0 a DR 15
DR 16 Bit’s
Area T LEITURA/ESCRITA
T000 ao T4095
(Temporizador) Temporizadores
LEITURA/ESCRITA
Area C (Contador) C000 ao C4095
Contadores
LEITURA/ESCRITA
Acesso só canal a canal;
Retém estado em caso
Area Leitura / de falha de energia;
DM000 ao DM 32767
DM Escrita
Nesta AREA algumas
zonas são dedicadas a
periféricos, se utilizados
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 22 de 49
Endereçamentos dos Autómatos da Família CP1L … - Relés Especiais (exemplo)
Nome Tipo Bit Função
P_Off BOOL CF114 Bit sempre a off
P_ON BOOL CF113 Bit sempre a on
P_1min BOOL CF104 Bit pulsante de 1 minuto
P_0_02s BOOL CF103 Bit pulsante de 0,02 segundos
P_1s BOOL CF102 Bit pulsante de 1 segundo
P_0_2s BOOL CF101 Bit pulsante de 0,2 segundos
P_0_1s BOOL CF100 Bit pulsante de 0,1 segundo
P_AER BOOL CF011 Bit de erro no acesso
P_UF BOOL CF010 Bit de erro por defeito (underflow)
P_OF BOOL CF009 Bit de erro de excesso (overflow)
P_N BOOL CF008 Bit negação
P_LT BOOL CF007 Bit de “menor do que”
P_EQ BOOL CF006 Bit de “igual a”
P_GT BOOL CF005 Bit de “maior do que”
P_CY BOOL CF004 Bit de carry (CY)
P_ER BOOL CF003 Bit de erro (ER)
P_LE BOOL CF002 Bit de “menor ou igual do que”
P_NE BOOL CF001 Bit de diferente (not equals (NE) flag)
P_GE BOOL CF000 Bit de “maior ou igual do que”
P_output_off_bit BOOL A500.15 Bit de saída desligada
P_EMC WORD A473 EMC Area Parameter
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 23 de 49
INSTRUÇÕES DE TRATAMENTO LÓGICO
Num esquema de contactos, temos a possibilidade de colocar relés em série, em
paralelo, operar com relés negados e/ou várias combinações entre estas hipóteses.
INSTRUÇÕES BÁSICAS (LD, OUT, END )
Vamos começar por analisar a programação de um circuito puramente académico, mas
que nos vai servir como primeira abordagem à programação.
Exemplo
Imaginemos um circuito controlado por um autómato cuja lógica pretendida é a
seguinte:
- O estado da saída 10.00 é dado pelo estado da entrada 0.00.
Em linguagem de contactos, teríamos a seguinte linha lógica:
O que seria em linguagem corrente, qualquer coisa como:
.Pega no estado do bit 000.00
.Coloca no bit 010.00
.Fim
INSTRUÇÕES (AND, OR, NOT)
Para implementar circuitos lógicos, dispomos ainda das seguintes instruções:
AND - REALIZA UM E LÓGICO COM O BIT ESPECIFICADO
OR - REALIZA UM OU LÓGICO COM O BIT ESPECIFICADO
NOT - NEGA O ESTADO DO BIT AO QUAL ESTÁ ASSOCIADO
AND LOAD - REALIZA UM E LÓGICO ENTRE DOIS BLOCOS LÓGICOS.
OR LOAD - REALIZA UM OU LÓGICO ENTRE DOIS BLOC OS LÓGICOS
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 24 de 49
INSTRUÇÃO AND
Exemplo
Pretende-se implementar um circuito lógico que activa a saída 10.00 do
autómato, só se as entradas 0.00 e 0.01 e 0.02 estiverem activas (ON).
O esquema de contactos correspondente será:
O autómato ao interpretar cada linha do programa, vai executar as funções de uma
forma sequencial e vai guardando de imediato o resultado lógico resultante da execução.
INSTRUÇÃO NOT
Exemplo
Pegando no exemplo anterior, pretende-se que a saída 10.00 fique activa se as
entradas 0.00 e 0.02 estiverem a OFF e a entrada 0.01 estiver a ON (considera-se que
uma entrada está a ON quando o led que a sinaliza, se encontra ligado).
A representação em linguagem de contactos, será:
A função NOT pode ser usada conjuntamente com as funções LD, AND, OR e
OUT.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 25 de 49
INSTRUÇÃO OR
Exemplo
Pretende-se implementar um circuito lógico que active a saída 10.03 quando a
entrada 0.01 estiver a OFF ou quando as entradas 0.02 ou 0.03 estiverem a ON.
O esquema de contactos correspondente ao especificado será:
INSTRUÇÕES (AND LOAD, OR LOAD)
AND LOAD
A instrução AND LOAD permite colocar em série dois blocos lógicos, ou seja,
permite realizar um E lógico entre dois blocos.
Esta função, bem como as que se seguem neste capitulo, são particularmente
importante quando a programação está a ser feita via consola de programação (Lista de
instruções). Quando em programação com Software/PC, a passagem de Linguagem de
Contactos a Lista de Instruções é feita de modo transparente para o utilizador.
De qualquer das formas, será aqui abordada a sua implementação.
Exemplo
Como exemplo vamos implementar um circuito, capaz de activar a saída
10.00 sempre que a entrada 0.00 ou 0.01 estiverem a ON e as entradas
002 ou 003 estiverem também a ON.
O esquema de contactos será:
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 26 de 49
A programação deste esquema de contactos implica que façamos um tratamento
diferente do circuito. Assim vamos dividir o circuito em dois blocos A e B.
Tudo se passa como se estivéssemos a programar dois blocos lógicos
independentes, e os ligássemos no fim em série (com a instrução AND LD).
Para mais fácil compreensão, vamos fazer a analogia da programação deste
circuito com o cálculo de resistências equivalentes. Vamos supor que cada bit do esquema
acima é uma resistência eléctrica.
Para calcularmos a resistência equivalente do circuito, teríamos de calcular primeiro o
paralelo da resistência 0.00 com a resistência 0.01, seguidamente calcular o paralelo da
resistência 0.02 com a resistência 0.03 e então finalmente calcular a série das resistências
equivalentes anteriormente calculadas.
OR LOAD
A instrução OR LOAD permite colocar em paralelo dois blocos lógicos, ou seja,
permite realizar um OU lógico entre dois blocos.
Exemplo
Pretende-se implementar um circuito lógico capaz de activar a saída 10.00 sempre
que as entradas 0.00 e 0.01 ou as entradas 0.02 e 0.03 estiverem simultaneamente a
ON.
O esquema de contactos será:
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 27 de 49
A programação deste esquema de contactos implica, tal como no caso anterior, um
tratamento diferente do circuito. Vamos dividir o circuito em dois blocos A e B.
Tudo se passa como se estivéssemos a programar dois blocos lógicos
independentes, e os ligássemos no fim em paralelo (com a instrução OR LD).
PROGRAMAS COM JUNÇÃO DE BLOCOS AND LOAD E OR LOAD
Por vezes, há necessidade de criar vários blocos lógicos para se poder traduzir
correctamente em linguagem mnemónica o esquema em causa.
NOTA: Uma instrução AND LD ou OR LD junta só dois blocos lógicos.
Exemplo
No exemplo seguinte, pretende-se a linguagem mnemónica correspondente ao
esquema de contactos.
Tal como no exemplo anterior, vai ser necessário criar vários blocos lógicos que
irão depois ser associados usando instruções AND LOAD e OR LOAD. Para
facilitar a codificação, na figura seguinte assinalam-se os diversos blocos em que
se deve subdividir o esquema.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 28 de 49
Sempre que definimos um bloco lógico, é necessário começá-lo com uma instrução
LOAD.
No início do capítulo indicou-se que o autómato guardava os resultados de cada
operação lógica, resultantes da execução do programa, numa memória; na verdade esta
memória não é única, mas faz parte de um ficheiro LIFO (last in, first out) ou seja um
ficheiro onde o último valor a ser guardado, é o primeiro a sair (Tal como um monte de
fichas, a primeira ficha a ser colocada no monte, é a última ser retirada).
Sempre que se inicia um bloco lógico, é adicionada
uma ficha ao ficheiro, que guarda os valores lógicos
decorrentes da execução do programa do bloco em causa.
Sempre que o autómato encontra uma instrução AND LD ou OR
LD, usa as duas últimas fichas colocadas no ficheiro e
executa a operação lógica AND ou OR usando o valor
lógico contido nessas fichas.
Neste autómato, o número máximo de fichas (de posições de memória) é
oito.
Tal como na tradução de um texto, a conversão de linguagem de contactos para
mnemónica, dever ser tão fiel quanto possível. Se a codificação for bem feita, então a
partir do código é possível refazer o esquema de contactos. Para tal, a leitura do esquema
de contactos dever fazer-se de cima para baixo e da esquerda para a direita.
Para melhor se entender o desempenho do ficheiro LIFO (anteriormente descrito) e a
sua relação com as instruções AND LOAD e OR LOAD, mostra-se na figura seguinte a
evolução dos valores lógicos correspondentes ao exemplo 2.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 29 de 49
O exemplo exposto
apresenta-se um pouco confuso no
que respeita à sua codificação em
linguagem mnemónica. No entanto,
respeitando o esquema tal e qual ele
se apresenta, a solução indicada é a
única correcta. Quando não é
necessário respeitar o desenho do
esquema de contactos, podemos
introduzir pequenas alterações, de
forma a simplificar a sua
programação. O esquema de
contactos que se segue é um bom
exemplo disso; com algumas
alterações no esquema, e sem alterar a lógica, é possível reduzir o trabalho e o número de
instruções para a programação do esquema inicialmente proposto neste exemplo.
USO DE TR’S
Conforme já foi anteriormente referido, existem neste autómato 8 relés temporários
(TR). Estes não devem ser usados como relés internos, sendo o seu uso só destinado à
conversão de um esquema de contactos para linguagem mnemónica.
O TR (relé temporário) serve para guardar temporariamente o estado lógico
de um ponto do circuito onde este se ramifica. Esse valor lógico será posteriormente
lido para programar o restante circuito, reduzindo assim o número de instruções.
Exemplo
TR0 TR1
Em cada malha podem usar-se até oito relés temporários (do TR0 ao TR7)
e não é necessário seguir qualquer ordem sequencial no seu uso.
NOTA: No mesmo programa, podem usar-se os mesmos tr's quantas vezes for
necessário.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 30 de 49
INTRODUÇÃO AO CX-PROGRAMMER
Como qualquer outra aplicação do Windows, para executar o CX-
Programmer é utilizado o menu Start.
Ao arrancar, o programa aparece com um grupo de barras de ferramentas e uma área
de trabalho completamente vazia.
AMBIENTE DE TRABALHO
Para aceder à área de trabalho é necessário criar um novo projecto ou abrir um já
criado.
O CX-Programmer utiliza 2 formatos de ficheiro
CXP - Ficheiro de projecto do CX-Programmer
CXT - Ficheiro de texto criado pela ferramenta de conversão
O ficheiro de projecto contem um ou vários programas e a informação relativa a cada
PLC. Os programas que compõem um projecto podem referir-se a PLCs de famílias
diferentes.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 31 de 49
CRIAÇÃO DE UM PROGRAMA NOVO
Para melhor compreensão do funcionamento do Cx-Programmer, vamos utilizar o
programa utilizado no exemplo anterior, seguindo passo a passo as operações necessárias para
a sua implementação em Cx-Programmer.
EXERCÍCIO AUXILIADO – (PROJECTO - FASE 2)
Objectivo - Primeiro contacto com a ferramenta de programação Cx-
Programmer
Tendo em conta o seguinte programa, fruto da fase 1 do nosso projecto,
vamos efectuar a sua implementação recorrendo ao Cx-Programmer.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 32 de 49
1º Passo – Criação de um novo projecto
Para criar um novo projecto, é necessário seleccionar um PLC e uma rede de
comunicação, ou seja o modo como o computador (PC), vai estabelecer a
comunicação com o autómato programável (PLC).
2º Passo – Inserção dos contactos
Estamos agora em posição de iniciar o desenho do nosso programa. Inserindo
os contactos necessários.
Considerar:
- Entradas
- 000.00 – ON (Ligar motor)
- 000.01 – OFF (Desligar motor)
- Saídas
- 010.00 – MT (Motor)
Inserção de um contacto aberto.
Seleccionar o ícone e posicionar o símbolo no ponto desejado, ou premir a
tecla “C” ou ainda utilizar o shortcut programado.
Escrever o endereço do contacto ou nome da variável. Se a variável não
estava definida, pode-se indicar um endereço e um comentário.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 33 de 49
Inserção de outros contactos
Para adicionar um contacto negado, utilizar o ícone , a tecla “/” ou o
shortcut programado.
Para adicionar um contacto de saída, utilizar o ícone , a tecla “O”
ou o shortcut programado.
Para unir os dois circuitos, utilizar o ícone , a tecla “V” para unir
para baixo a tecla “U” para unir para cima ou os shortcuts programados
3º Passo – Conclusão do programa
Feita a primeira malha, temos:
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 34 de 49
Falta agora finalizar o programa com a função de fim END(01).
NOTA: A Instrução END(01), é indispensável para o funcionamento do programa.
4º Passo – Verificação do programa
Feita a segunda malha, ficou:
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 35 de 49
Estamos agora em condições de fazer a verificação do programa.
A verificação do programa é realizada durante a
compilação.
Os possíveis erros ou avisos são indicados na janela de
saída (output) tal como se mostra na figura abaixo.
Fazendo duplo “Click” sobre o erro, o cursor
posiciona-se a vermelho sobre a instrução ou parte do
programa que tem o erro.
A compilação é realizada automaticamente antes de fazer uma
transferência para o PLC.
O controlo da compilação pode-se realizar também
mediante: ícone
5º Passo – Iniciar as comunicações PC - PLC
Feitas as ligações físicas necessárias para permitir as comunicações PC – PLC,
pode ser feita a ligação entre eles.
Para entrar em
modo On-Line seleccionar o
ícone
Ao estabelecer a comunicação, a área de edição
do programa passa para a cor cinza. Neste
modo não é possível alterar variáveis nem o
programa.
Para modificar o programa,
tem que activar a Edição
On-Line (a anlisar mais à
frente).
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 36 de 49
6º Passo – Modo de funcionamento do PLC
Antes de iniciar a transferência do programa para o PLC, este deve ser
colocado em “Modo “Program”.
7º Passo – Transferência do programa para o PLC
Feitos os passos anteriores, estamos em condições de transferir o
programa para o PLC.
- Seleccionar o ícone para enviar o programa para o
PLC.
- Tal como no Syswin, é possível seleccionar as partes do
projecto a transferir.
- Se no PLC está instalada a Memory Card (só alguns PLC´s),
também é possível transferir os símbolos e comentários.
8º Passo – Teste do programa em On-Line
Já com o programa no PLC, e em On-Line com o PC, podemos verificar o
comportamento do mesmo.
- Como no Syswin, é possível monitorizar a execução do programa,
premindo o ícone .
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 37 de 49
- A linha de programa “activa” é visualizada numa cor distinta. Esta cor
pode ser alterada pelo utilizador. Para visualizar esta linha
activa, premir o ícone .
- O CX-Programmer permite também a monitorização do código
mnemónico.
9º Passo – Forçar dados
Nem sempre o processo em causa permite efectuar as actuações necessárias para
testar o programa. Nesses casos pode-se recorrer à activação forçada de
determinados dados.
- Para activar ou forçar um bit ou o valor de uma variável, é
suficiente premir a tecla direita do rato sobre o dado que se quer
alterar.
- Para isto, o CX-P deve estar em modo monitorização On-Line
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 38 de 49
JANELA DE PROJECTO
- A janela de projecto agrupa vários tipos de Editores necessários para a
completa elaboração do projecto.
- Cada um deles tem um menu acessível mediante a tecla direita do rato.
- Fazendo “duplo click” sobre cada opção na janela de projecto,
acede-se ao Editor correspondente
INSTRUÇÃO KEEP(11)
A instrução KEEP(11), permite definir um relé como biestável, sendo o seu estado
definido por duas condições lógicas; uma de SET e outra de RESET.
O relé especificado na instrução ficará activo desde que a condição de
SET tenha tomado o valor ON.
O relé só desactivará quando existir um valor ON na condição de RESET.
NOTA: Caso haja simultaneidade das duas condições a ON, é a
condição de RESET a predominante.
Abaixo apresenta-se um diagrama de tempos exemplificativo.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 39 de 49
NOTA: Sempre que existam vários blocos lógicos a controlar uma instrução,
estes são programados em primeiro lugar e só depois é programada a instrução em causa.
INSTRUÇÕES SET E RESET
Em alternativa à instrução KEEP(11) que congrega as condições de activação e
desactivação de um bit, existem duas instruções que permitem manipular o estado de um bit,
em circunstâncias semelhantes. Essas instruções são SET e RESET.
Quando a condição lógica que antecede a instrução SET vai a ON (ilustrada no
exemplo seguinte pelo bit 0.00), o bit manipulado pela instrução (10.00) é também levado
a ON, mantendo-se nesse estado.
Situação semelhante acontece com a instrução RESET, pois quando a condição
lógica que antecede esta instrução vai a ON (ilustrada no exemplo pelo bit 0.02) , o bit
manipulado (10.00) é em simultâneo levado a OFF, permanecendo nesse estado.
CX-PROGRAMMER – INSTRUÇÕES AVANÇADAS
Determinadas instruções não podem ser acedidas directamente, e são tratadas como
funções avançadas, é o caso dos Temporizadores, Contadores, etc.
Neste grupo inserem-se também as funções KEEP e SET/RESET
Estas funções podem ser acedidas pelo seu código (número que se encontra
dentro de parêntesis – Ex: KEEP(11)) ou directamente pelo seu nome.
Exemplo
A título de exemplo, vamos seguir passo a passo a inserção da função
KEEP(11).
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 40 de 49
1º Passo
Seleccionar o ícone e posicionar o cursor no ponto desejado.
Ou posicionar a zona activa (rectângulo azul) e premir a tecla “I” ou o
shortcut programado
2º Passo
Escrever o numero ou nome da função pretendida, e configurar os parâmetros
requeridos
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 41 de 49
INSTRUÇÃO INTERLOCK
A instrução INTERLOCK (IL(02)) está sempre associada à instrução INTERLOCK
CLEAR (ILC(03)), sendo esta última sempre antecedida pela primeira.
A instrução INTERLOCK é sempre antecedida de uma condição lógica que define a
actuação da instrução IL(02). Quando o resultado da condição lógica que antecede IL(02) é
OFF, todas as instruções OUT contidas entre esta instrução e a instrução ILC(03) tomam o
estado OFF, independentemente do estado das condições que lhes dão origem; a todos os
temporizadores é feito o reset. Se a condição que antecede a instrução IL(02) estiver a ON, a
parte do programa entre IL(02) e ILC(03) não é afectada.
Podem usar-se várias funções IL(02) com uma só função ILC(03).
ATENÇÃO: Os relés encravados por funções KEEP(11) não são afectados por esta
instrução.
Exemplo
O programa que se segue, tem activa apenas a saída 010.02, embora todas
elas (010.02, 010.00, 010.01) tenham condições lógicas para tal.
A diferença está nas condições de INTERLOK.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 42 de 49
INSTRUÇÕES DIFU(13) E DIFD(14)
Por vezes deparamo-nos com algumas dificuldades.
Dificuldades essas que se compadecem com o facto de existirem condições
de SET e RESET simultaneamente para a mesma saída, como é o caso que se segue:
NOTA: Nestas situações prevalece o RESET.
Situações idênticas a estas são bastante comuns em programação de autómatos.
Motivo pelo qual existem funções especificas para estes casos, designadas por DIFU(13) e
DIFD(14).
DIFU(13)
A instrução DIFU(13) permite activar um relé durante um ciclo de scan, sempre que a
condição lógica que antecede a instrução, transita do estado OFF para ON.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 43 de 49
DIFD(14)
A função DIFD(14) permite activar um relé durante um ciclo de scan, sempre
que a condição lógica que antecede a instrução, transita de um estado ON para OFF.
TEMPORIZADORES E CONTADORES
Ao falarmos das áreas de relés no início do capítulo, fez-se referência à área de
TC. Esta área é partilhada por Temporizadores e Contadores. A cada número TC podemos
associar um só temporizador ou contador.
TEMPORIZADORES
Para definir um temporizador existem duas instruções disponíveis: TIM e
TIMH(15).
TIM
A instrução TIM permite definir um temporizador de atraso à operação com a
precisão de 0.1 segundo podendo este ter um alcance máximo de 999.9 segundos.
O valor de PRESET (tempo inicial) pode ser especificado por uma
constante ou pelo conteúdo de uma word.
Associado a cada temporizador existe um contacto TIM N (sendo N o número
do temporizador).
A instrução TIM é sempre antecedida por uma condição lógica, que estando a ON
activa o temporizador; este começa a decrementar o tempo pré- seleccionado e
quando atinge o zero, fecha o contacto TIM N. Se a condição lógica passar a OFF,
implica o RESET do temporizador e consequentemente a abertura do contacto TIM N.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 44 de 49
Número do
temporizador
Tempo
pretendido
CONTADORES
Há várias métodos para implementar contadores. Neste capítulo vamos apenas abordar a
programação da instrução CNT e CNTR(12).
CNT
A instrução CNT permite a programação de um contador decrescente. Este é
identificado com um número, tal como acontece nos temporizadores. É especificado também o
valor de PRESET que pode ser uma constante ou o valor contido numa word.
A instrução CNT está associada a duas condições lógicas:
Na primeira quando acontece uma transição de estado de OFF
para ON, faz decrementar em uma unidade o conteúdo do
contador.
Na segunda, sempre que está a ON, faz o RESET ao contador
e consequentemente o conteúdo do contador toma o valor de
PRESET.
A cada contador está associado um contacto CNT N (sendo N o número do contador),
que vai a ON sempre que o contador toma o valor ZERO.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 45 de 49
Quando o contador atinge o valor zero, permanece nesse valor até que seja efectuado
o RESET ao contador.
Um pormenor importante de se referir, é que ao contrário dos
temporizadores, os contadores retêm o seu conteúdo, mesmo após a falha de alimentação do
autómato. Tirando partido deste pormenor, pode implementar-se um temporizador com
retenção do tempo decorrido, usando para o efeito um contador e um relé de clock da
área de relés especiais.
CNTR(12)
A instrução CNTR(12) permite programar um contador reversível. Tal
como na instrução CNT, este é identificado com um número.
É especificado também o valor de PRESET que pode ser uma constante ou
o valor especificado por um canal.
A instrução CNTR(12) tem associadas três condições lógicas:
Na primeira condição lógica, uma transição de OFF para ON faz
incrementar o valor do contador
Na segunda condição, uma transição de OFF para ON faz
decrementar uma unidade ao valor do contador
A terceira condição lógica faz o RESET ao contador, sempre
que esteja a ON. O RESET neste contador faz com que o seu
conteúdo vá a zero.
Associado ao CNTR(12) há um contacto de um relé que é designado tal como nos
contadores anteriormente descritos (CNT X ;sendo X o nº atribuído ao contador). Esse
contacto vai a ON sempre que há uma transição de 0 para o valor de preset ou deste para 0.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 46 de 49
INSTRUÇÃO CMP(20)
Esta instrução permite comparar dois valores numéricos sendo o resultado dado pelo
estado de três relés especiais.
A instrução CMP(20) é sempre antecedida por uma condição lógica que
quando está a ON permite a execução da comparação.
Sempre que esta instrução é executada, é comparado o valor contido em A, com o
valor contido em B.
A e B podem conter uma constante ou o conteúdo de uma word,
temporizador ou contador.
Da comparação obtemos um dos seguintes resultados:
- Se A>B então o relé 255.05 vai a ON.
- Se A=B então o relé 255.06 vai a ON.
- Se A<B então o relé 255.07 vai a ON.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 47 de 49
INSTRUÇÃO MOV(21)
A instrução MOVE permite copiar o valor contido em A para o destino expresso em
B, sempre que a condição lógica que antecede esta instrução esteja a ON.
"A" pode ser um canal, um temporizador/contador ou uma constante. "B"
pode ser um canal ou temporizador/contador.
Exemplo
No exemplo que se segue, a instrução MVN(21) copia o conteúdo negado do canal
000 (entradas no caso do CPM1A) para o canal 010 (saídas no caso do CPM1A).
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 48 de 49
INSTRUÇÃO SFT(10)
A instrução SHIFT permite implementar um registo deslocamento
começando na word A e acabando na word B.
A word A deverá ter um endereço menor ou igual à word B e as duas devem
pertencer à mesma área de memória.
Esta instrução é controlada por três condições lógicas:
- A primeira, define o estado do bit que "entra" no canal A. No momento
do deslocamento, o bit 0 da word A terá o estado lógico desta condição.
- A segunda, define o momento do deslocamento, que se verifica
sempre que houver uma transição de OFF para ON nesta condição.
- A terceira, é a condição de RESET. Quando o seu estado é ON, os
bits das words afectadas pela instrução SHIFT, são forçados a OFF.
Formador: Nelson Ornelas Data: 2012/2013
Compilação de Manual OMRON Página 49 de 49
Вам также может понравиться
- O Ferro: Propriedades, Aplicações e ProduçãoДокумент18 страницO Ferro: Propriedades, Aplicações e Produçãofrancisco1fernand-11Оценок пока нет
- DLei 162 - 2019Документ18 страницDLei 162 - 2019red_championОценок пока нет
- Manual Ed4Документ38 страницManual Ed4francisco1fernand-11Оценок пока нет
- Manual Jul HoДокумент134 страницыManual Jul Hofrancisco1fernand-11Оценок пока нет
- Exercicio Electropneumatica SiloДокумент1 страницаExercicio Electropneumatica Silofrancisco1fernand-11100% (1)
- Exercicio Grafcet Maquina de RolosДокумент6 страницExercicio Grafcet Maquina de RolosFabio CarvalhoОценок пока нет
- Treinamento Common Rail PDFДокумент309 страницTreinamento Common Rail PDFtadeu90% (21)
- Ceramic OsДокумент27 страницCeramic Osfrancisco1fernand-11Оценок пока нет
- SISTEMA DE INJEÇÃO DE MOTOR DIESELДокумент12 страницSISTEMA DE INJEÇÃO DE MOTOR DIESELJessica LeiteОценок пока нет
- Manual SMAДокумент40 страницManual SMAfrancisco1fernand-11Оценок пока нет
- Introdução à Automação IndustrialДокумент32 страницыIntrodução à Automação IndustrialalexfmiОценок пока нет
- Eletropneumática PDFДокумент1 страницаEletropneumática PDFfrancisco1fernand-11Оценок пока нет
- Injecao EletronicaДокумент10 страницInjecao Eletronicafrancisco1fernand-11100% (1)
- Introdução à Automação IndustrialДокумент32 страницыIntrodução à Automação IndustrialalexfmiОценок пока нет
- Soluções de Ligação FotovoltaicoДокумент10 страницSoluções de Ligação Fotovoltaicofrancisco1fernand-11Оценок пока нет
- Guia para Certificação de Uma Unidade de ProduçãoДокумент16 страницGuia para Certificação de Uma Unidade de ProduçãoVictor SimõesОценок пока нет
- Aut IndДокумент130 страницAut IndBacamarteОценок пока нет
- Controle de qualidade visual eletropneumáticoДокумент1 страницаControle de qualidade visual eletropneumáticofrancisco1fernand-11Оценок пока нет
- Celex 52016XC0115 (01) PT TXTДокумент99 страницCelex 52016XC0115 (01) PT TXTfrancisco1fernand-11Оценок пока нет
- Automação de Sistema RobotizadoДокумент182 страницыAutomação de Sistema Robotizadofrancisco1fernand-11Оценок пока нет
- Eletropneumatica 150626172517 Lva1 App6892Документ37 страницEletropneumatica 150626172517 Lva1 App6892francisco1fernand-11Оценок пока нет
- CT Ceaut Iv 2014 01Документ54 страницыCT Ceaut Iv 2014 01francisco1fernand-11Оценок пока нет
- 1 - 5625 - Revista Manutencao N 138 - 139 3 Trimestre 2018Документ11 страниц1 - 5625 - Revista Manutencao N 138 - 139 3 Trimestre 2018francisco1fernand-11Оценок пока нет
- Exercicios EletroPneumática GrafcetДокумент12 страницExercicios EletroPneumática Grafcetfrancisco1fernand-11Оценок пока нет
- Exercicios PneumáticaДокумент21 страницаExercicios Pneumáticafrancisco1fernand-11100% (1)
- Exercicios EletroPneumática BasicaДокумент6 страницExercicios EletroPneumática Basicafrancisco1fernand-11Оценок пока нет
- Automação Industrial IДокумент58 страницAutomação Industrial Itriplox2Оценок пока нет
- PneumáticaДокумент115 страницPneumáticafrancisco1fernand-11Оценок пока нет
- Transportador 2 MotoresДокумент3 страницыTransportador 2 Motoresfrancisco1fernand-11Оценок пока нет
- ABD2023B - 1.3 Fundamentos de BD-videoДокумент6 страницABD2023B - 1.3 Fundamentos de BD-videoClaudio BatistaОценок пока нет
- Banco de Dados Dependência Funcional e NormalizaçãoДокумент14 страницBanco de Dados Dependência Funcional e NormalizaçãoCarlos AlianОценок пока нет
- SKF Microlog AX SeriesДокумент354 страницыSKF Microlog AX SeriesJoelma TurolaОценок пока нет
- Aula 04Документ185 страницAula 04Josielson LopesОценок пока нет
- Apostila - T099-1 BR - Suspensão Pneumática ECS Ônibus - 20161119Документ50 страницApostila - T099-1 BR - Suspensão Pneumática ECS Ônibus - 20161119Pedro VicenteОценок пока нет
- WCS - Test2 RFC - 2544 2023 04 20T17.08.45Документ10 страницWCS - Test2 RFC - 2544 2023 04 20T17.08.45Pedro Ferreira Da Silva NetoОценок пока нет
- Otimizando o Linux para Computadores LentosДокумент17 страницOtimizando o Linux para Computadores LentosMuryllo Siqueyros Lupus SanteОценок пока нет
- Configura VLAN gerência DSLAMДокумент3 страницыConfigura VLAN gerência DSLAMThiago OliveiraОценок пока нет
- Projeto Operacional EBN - 1º SIMULADO Pà S-EDITAL - PMPEДокумент16 страницProjeto Operacional EBN - 1º SIMULADO Pà S-EDITAL - PMPEdavigamer357Оценок пока нет
- Rede de Telefonia Fixa: Elementos e ClassificaçãoДокумент25 страницRede de Telefonia Fixa: Elementos e ClassificaçãoAlsizio SiabalaОценок пока нет
- SIDI - ExerciciosДокумент4 страницыSIDI - ExerciciosArkeely joaquim100% (1)
- Integração com o sistema Gladius LITE para visitantesДокумент8 страницIntegração com o sistema Gladius LITE para visitantesPEDRO GABRIEL DE CARVALHOОценок пока нет
- Declaração anual de rendimentos do trabalho Modelo 2 AngolaДокумент1 страницаDeclaração anual de rendimentos do trabalho Modelo 2 AngolaTércio SilvaОценок пока нет
- POP Confidencialidade LaboratórioДокумент4 страницыPOP Confidencialidade LaboratórioLia ReckОценок пока нет
- O Ambiente Internet - Cliente X Servidor e As TecnologiasДокумент49 страницO Ambiente Internet - Cliente X Servidor e As TecnologiasJackson Uchoa PonteОценок пока нет
- Contrato SupersimДокумент7 страницContrato SupersimThyago Dão DuarteОценок пока нет
- Trabalho 3 Teoria Da Computação - 2021-1Документ2 страницыTrabalho 3 Teoria Da Computação - 2021-1Adriano ArrudaОценок пока нет
- Manual Epson Stylus TX105Документ52 страницыManual Epson Stylus TX105m4k078Оценок пока нет
- Treinamento de Virtual Report PDFДокумент37 страницTreinamento de Virtual Report PDFstefeni rufatoОценок пока нет
- Comunicação imobiliária: dicas para criar uma estratégia eficienteДокумент19 страницComunicação imobiliária: dicas para criar uma estratégia eficientewilliam machadoОценок пока нет
- 7 Maneiras de Ganhar Dinheiro com BlogДокумент41 страница7 Maneiras de Ganhar Dinheiro com BlogReicton Rilder GuerinoОценок пока нет
- PLÁGIOДокумент26 страницPLÁGIOMaria Lucemir Lopes de QueirozОценок пока нет
- Apostila 12 Laços de Repetição em JavaДокумент6 страницApostila 12 Laços de Repetição em JavaAnderson Marques NetoОценок пока нет
- Cibercrime e Prova Digital PDFДокумент103 страницыCibercrime e Prova Digital PDFzx1994Оценок пока нет
- Unidade 1.1Документ11 страницUnidade 1.1Cristiano E Leidiane PortugalОценок пока нет
- Schiller At-101 - Manual Usuario PTДокумент62 страницыSchiller At-101 - Manual Usuario PTfamiliaaraujo26203Оценок пока нет
- Os Poderes Da IAДокумент37 страницOs Poderes Da IADeby BaldОценок пока нет
- Por que o Youtube se tornou o maior site de vídeosДокумент2 страницыPor que o Youtube se tornou o maior site de vídeosPatricia EiharaОценок пока нет
- ITN Module 2Документ60 страницITN Module 2Carlos Eugenio BenicioОценок пока нет
- Analista de Tecnologia Da Informacao Governanca de TiДокумент23 страницыAnalista de Tecnologia Da Informacao Governanca de Tijonas grossiОценок пока нет