Вам также может понравиться
- 4 - 4 Lista de Proyectos Adjudicados y Concluidos Mediante OxI (28-02-2020)Документ80 страниц4 - 4 Lista de Proyectos Adjudicados y Concluidos Mediante OxI (28-02-2020)MarcoAntonioDiazCotrinaОценок пока нет
- Respuesta Tarea 1Документ3 страницыRespuesta Tarea 1alexanderОценок пока нет
- Parcial Pregunta 3Документ5 страницParcial Pregunta 3alexanderОценок пока нет
- GRUPO7 Agrietado NoagrietadoДокумент8 страницGRUPO7 Agrietado NoagrietadoalexanderОценок пока нет
- Formulacion de Proyectos de InversionДокумент57 страницFormulacion de Proyectos de InversionalexanderОценок пока нет
- GRUPO7 Agrietado NoagrietadoДокумент8 страницGRUPO7 Agrietado NoagrietadoalexanderОценок пока нет
- Formato de Reporte Diario Liszet TorresДокумент3 страницыFormato de Reporte Diario Liszet TorresalexanderОценок пока нет
- Trabajo N°1 Lopez Garcia JulioДокумент7 страницTrabajo N°1 Lopez Garcia JulioalexanderОценок пока нет
- Acuerdos PDFДокумент1 страницаAcuerdos PDFalexanderОценок пока нет
- Compromiso de Trabajo Grupal PDFДокумент1 страницаCompromiso de Trabajo Grupal PDFalexanderОценок пока нет
- CaratulasДокумент3 страницыCaratulasalexanderОценок пока нет
- Formulacion de Proyectos de InversionДокумент57 страницFormulacion de Proyectos de InversionalexanderОценок пока нет
- Presentación Del CursoДокумент1 страницаPresentación Del CursoalexanderОценок пока нет
- Explicacione Del Ciclo HidrologicoДокумент9 страницExplicacione Del Ciclo HidrologicoJuan Daniel ArqqueОценок пока нет
- Carne de Alpaca Envasada Al VacioДокумент183 страницыCarne de Alpaca Envasada Al VacioLuis ChОценок пока нет
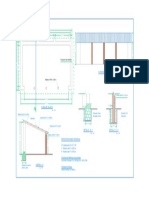
- Plano de CobertizoДокумент1 страницаPlano de CobertizoalexanderОценок пока нет
- Formulacion de Proyectos de InversionДокумент57 страницFormulacion de Proyectos de InversionalexanderОценок пока нет
- Clase 1Документ16 страницClase 1alexanderОценок пока нет
- 4 - 4 Lista de Proyectos Adjudicados y Concluidos Mediante OxI (28-02-2020)Документ80 страниц4 - 4 Lista de Proyectos Adjudicados y Concluidos Mediante OxI (28-02-2020)MarcoAntonioDiazCotrinaОценок пока нет
- Definicion de IdeaДокумент5 страницDefinicion de IdeaalexanderОценок пока нет
- Estructura Desarrollo de Investigación Inicial Diseño Rural IДокумент2 страницыEstructura Desarrollo de Investigación Inicial Diseño Rural IalexanderОценок пока нет
- PLANO DE COBERTIZO-ModelДокумент1 страницаPLANO DE COBERTIZO-ModelalexanderОценок пока нет
- Ficha Analisis FuncionalДокумент2 страницыFicha Analisis FuncionalalexanderОценок пока нет
- MISIONДокумент1 страницаMISIONalexanderОценок пока нет
- Infraestructura Reproductiva, Una Alternativa Validada Que Disminuye El Estrés e Incrementa La Fertilidad en AlpacasДокумент9 страницInfraestructura Reproductiva, Una Alternativa Validada Que Disminuye El Estrés e Incrementa La Fertilidad en AlpacasalexanderОценок пока нет
- EDUCACIONДокумент1 страницаEDUCACIONalexanderОценок пока нет
- Clase 1Документ16 страницClase 1alexanderОценок пока нет
- EDUCACIONДокумент1 страницаEDUCACIONalexanderОценок пока нет
- 2 PB PDFДокумент29 страниц2 PB PDFurzullithaОценок пока нет
- MISIONДокумент1 страницаMISIONalexanderОценок пока нет
- NPrisma A1a Claves-Fichas PDFДокумент4 страницыNPrisma A1a Claves-Fichas PDFcarolina84665856Оценок пока нет
- CalentamientoДокумент7 страницCalentamientomaribelОценок пока нет
- Expo Secadores Neumatica e HidraulicaДокумент25 страницExpo Secadores Neumatica e HidraulicaSaul Ramirez100% (1)
- Trabajo Individual Matemática - JCDДокумент10 страницTrabajo Individual Matemática - JCDCardenas Donay KinОценок пока нет
- Historia de Un ÁrbolДокумент1 страницаHistoria de Un ÁrbolChristopher George Egúsquiza CoaОценок пока нет
- Calculo Extractores EolicosДокумент5 страницCalculo Extractores EolicosEberthsonОценок пока нет
- STV Itemizado OficialДокумент12 страницSTV Itemizado OficialSergio ArriagadaОценок пока нет
- Como Citar en VancouverДокумент4 страницыComo Citar en VancouverPaulinaOrtizОценок пока нет
- Guía #11Документ12 страницGuía #11edinson herney lara llanosОценок пока нет
- Triptico de MoqueguaДокумент2 страницыTriptico de MoqueguaMartha Herrera82% (11)
- Ucc4011 01Документ67 страницUcc4011 01Junior MartinezОценок пока нет
- Primera PrácticaДокумент2 страницыPrimera PrácticaLeonardo A. CamarenaОценок пока нет
- EL CLIMA (Actividad en Clase)Документ3 страницыEL CLIMA (Actividad en Clase)Ariel Duvan Rojas VaronОценок пока нет
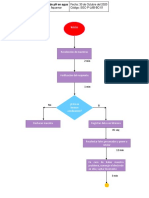
- Diagrama de Flujo - PHДокумент4 страницыDiagrama de Flujo - PHAlex Javier100% (1)
- Comentario Climograma Diferentes Lugares-ClimasДокумент2 страницыComentario Climograma Diferentes Lugares-ClimasLaura Gil de Sagredo del CorralОценок пока нет
- TALLER CATEGORÍAS GRAMATICALES MioДокумент4 страницыTALLER CATEGORÍAS GRAMATICALES MioKarem CañareteОценок пока нет
- Mapa MentalДокумент4 страницыMapa MentalEDSON VALLEОценок пока нет
- Informe Cambio Del Nivel Del MarДокумент43 страницыInforme Cambio Del Nivel Del MarZairichz KumikoОценок пока нет
- Brida Welding Neck Clase 300Документ2 страницыBrida Welding Neck Clase 300Erick100% (1)
- Meteorología Náutica - 10 - OlasДокумент4 страницыMeteorología Náutica - 10 - OlasEze VuosoОценок пока нет
- Clima en - TetlaДокумент2 страницыClima en - TetlaantoineОценок пока нет
- Sanchez Silva - Marcelino Pan Y VinoДокумент28 страницSanchez Silva - Marcelino Pan Y VinoNaharai Tec Garrido0% (1)
- Coeficientes de Seguridad o Coeficientes de IgnoranciaДокумент41 страницаCoeficientes de Seguridad o Coeficientes de IgnoranciaFrank Lenin Ramos UretaОценок пока нет
- Presencia de La NiñaДокумент17 страницPresencia de La NiñaDarwin HuaytaОценок пока нет
- Shalámov-Relatos de Kolymá - Por La NieveДокумент1 страницаShalámov-Relatos de Kolymá - Por La NieveJesús AntuñaОценок пока нет
- El Parque Tematico Europa TodoДокумент78 страницEl Parque Tematico Europa TodoSergio EspinozaОценок пока нет
- Guiade Estudio I.2.1. Las Plantas y El Clima (Primera Parte)Документ5 страницGuiade Estudio I.2.1. Las Plantas y El Clima (Primera Parte)Oscar DíazОценок пока нет
- TDR para Diagnóstico Socioeconómico y DemográficoДокумент10 страницTDR para Diagnóstico Socioeconómico y DemográficoCarlosGarciaОценок пока нет
- FRANKENSTEIN, El Sabor DE LOS CLIMAS HELADOSДокумент3 страницыFRANKENSTEIN, El Sabor DE LOS CLIMAS HELADOSVirginia RodríguezОценок пока нет
- El Rapto de La PrimaveraДокумент12 страницEl Rapto de La PrimaveraCinthia de León100% (1)