Вам также может понравиться
- Emerging Nanoelectronic DevicesОт EverandEmerging Nanoelectronic DevicesAn ChenОценок пока нет
- New Report ProjectДокумент30 страницNew Report Projectsuraj saymberОценок пока нет
- B.E Mech Batchno 75Документ38 страницB.E Mech Batchno 75Divyansh LohiaОценок пока нет
- ShortCircuit - Table of ContentДокумент8 страницShortCircuit - Table of ContentFasil Paruvanath0% (1)
- Digital Integrated Circuits - A Design Perspective (2nd Ed) TocДокумент10 страницDigital Integrated Circuits - A Design Perspective (2nd Ed) Tocemilko33% (3)
- Doykova Bonimira-2019-MOTOR-DRIVE SYSTEM EFFICIENCY INTERNAL CALCULATION TOOL AND PRODUCT INFORMATION DATABASE AUDIT BASED ON IEC 61800-9-2 STANDARD PDFДокумент68 страницDoykova Bonimira-2019-MOTOR-DRIVE SYSTEM EFFICIENCY INTERNAL CALCULATION TOOL AND PRODUCT INFORMATION DATABASE AUDIT BASED ON IEC 61800-9-2 STANDARD PDFReynaldo HutomoОценок пока нет
- Electric ScooterДокумент56 страницElectric ScooterAshwin ChaudhariОценок пока нет
- Sazz ConverterДокумент251 страницаSazz ConvertersathishОценок пока нет
- JahangirThesis Final (27 (1) .04.10)Документ93 страницыJahangirThesis Final (27 (1) .04.10)sabuj22Оценок пока нет
- Dffccil 2 X 25 KV Tender DocumentДокумент264 страницыDffccil 2 X 25 KV Tender DocumentNagi Reddy ChintakuntaОценок пока нет
- ElectricДокумент544 страницыElectricRupesh Sushir100% (1)
- Ecycle 01Документ58 страницEcycle 01SAUMYAJIT SABUIОценок пока нет
- Design of Electrical MachinesДокумент183 страницыDesign of Electrical MachinesMadhushree100% (5)
- Automatic Spot Welding MachineДокумент65 страницAutomatic Spot Welding MachineBaranishankarОценок пока нет
- Contents Technical 430Документ2 страницыContents Technical 430akshay gopalОценок пока нет
- Design and Fabrication of Electric Supercharger For 2 Wheeler Under High Speed ConditionДокумент64 страницыDesign and Fabrication of Electric Supercharger For 2 Wheeler Under High Speed ConditionSUJAY RAVIОценок пока нет
- MENG550 Mechanical Systems DesignДокумент11 страницMENG550 Mechanical Systems Designanon_97967156Оценок пока нет
- CONTENTSДокумент7 страницCONTENTSAliОценок пока нет
- Index SR No Name of Topic NoДокумент2 страницыIndex SR No Name of Topic NolokeshjawaleОценок пока нет
- WEG-Motores Trifasicos - w22Документ44 страницыWEG-Motores Trifasicos - w22lucianorodriguez1Оценок пока нет
- Over Speed Indication and Accident Avoiding System Project ReportДокумент41 страницаOver Speed Indication and Accident Avoiding System Project ReportRushabh Rajendra YerunkarОценок пока нет
- Speed Control of DC MotorДокумент42 страницыSpeed Control of DC MotorNisar Ahmed Rana50% (2)
- NEMA Vs IECДокумент44 страницыNEMA Vs IECQiang100% (1)
- Power Generation From Speed BrakerДокумент54 страницыPower Generation From Speed Brakerajith haridas100% (1)
- Foreword Preface About The Authors: Admin Aug 14th, 2021 0 CommentДокумент101 страницаForeword Preface About The Authors: Admin Aug 14th, 2021 0 Commentlvb123Оценок пока нет
- Motor of VTOL AircraftДокумент22 страницыMotor of VTOL Aircraftvimarsh joshiОценок пока нет
- Motor of VTOL Aircraft PDFДокумент22 страницыMotor of VTOL Aircraft PDFvimarsh joshiОценок пока нет
- Semiconductor Device FundamentalsДокумент13 страницSemiconductor Device Fundamentalsnoor_dcet0% (4)
- Graphic Whizard GW6000 Service ManualДокумент48 страницGraphic Whizard GW6000 Service ManualGustavoCorreaОценок пока нет
- Final MohanДокумент272 страницыFinal MohanKatie TaylorОценок пока нет
- WEG w22 Three Phase Motor Technical Nema Market 50029265 Brochure EnglishДокумент44 страницыWEG w22 Three Phase Motor Technical Nema Market 50029265 Brochure EnglishDerwaish JeeОценок пока нет
- 1822 B.E Eee Batchno 5Документ51 страница1822 B.E Eee Batchno 5amaljithsithu623846Оценок пока нет
- Modern Power Transformer Practice2Документ3 страницыModern Power Transformer Practice2amulya sОценок пока нет
- ESKOM Overhead Power Lines-The Planning Design & ConstructionДокумент789 страницESKOM Overhead Power Lines-The Planning Design & Constructionhajduk1286% (36)
- Design of Buck Boost Converter To Operate DC Load From Solar PanelДокумент51 страницаDesign of Buck Boost Converter To Operate DC Load From Solar PaneldattuОценок пока нет
- 02-RF Electronics Kikkert Index PDFДокумент5 страниц02-RF Electronics Kikkert Index PDFkuazuОценок пока нет
- MG34S302Документ246 страницMG34S302Herry SusiloОценок пока нет
- Improved Version of Energy Efficient Motor For Shell Eco MarathonДокумент32 страницыImproved Version of Energy Efficient Motor For Shell Eco MarathonHeru YulindoОценок пока нет
- Study On Effect of Wire EDM Process Parameters Using MADM/MCDM TechniqueДокумент81 страницаStudy On Effect of Wire EDM Process Parameters Using MADM/MCDM TechniqueMaher AhmedОценок пока нет
- Aaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGAДокумент7 страницAaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGAcraig pretoriusОценок пока нет
- 250 kVA Transformer Manufacturing and Transformer TestingДокумент84 страницы250 kVA Transformer Manufacturing and Transformer TestingPronoy Kumar100% (2)
- MIT Study of Electromagnetic Braking SystemДокумент20 страницMIT Study of Electromagnetic Braking Systemvedant kapseОценок пока нет
- Vijay BTP Report EndSemДокумент46 страницVijay BTP Report EndSemVijay AjayОценок пока нет
- G. K. Kharate: Principal Matoshri College of Engineering and Research Centre NashikДокумент55 страницG. K. Kharate: Principal Matoshri College of Engineering and Research Centre NashikJALLU SANTOSHI MRUDULAОценок пока нет
- A Major Project Report: Bachelor of TechnologyДокумент57 страницA Major Project Report: Bachelor of TechnologyMy StyleОценок пока нет
- Download ebook Electrical Machine Design Pdf full chapter pdfДокумент49 страницDownload ebook Electrical Machine Design Pdf full chapter pdfevelyn.beeman923100% (24)
- Design of Direct Driven Permanent Magnet GeneratorДокумент134 страницыDesign of Direct Driven Permanent Magnet GeneratorturcanОценок пока нет
- Numerical Sound Synthesis: Finite Difference Schemes and Simulation in Musical AcousticsОт EverandNumerical Sound Synthesis: Finite Difference Schemes and Simulation in Musical AcousticsОценок пока нет
- Thermo Generator PackageДокумент13 страницThermo Generator PackagedudulemarcОценок пока нет
- Sine Wave PWM (SPWM) Circuit Using Opamp - Homemade Circuit ProjectsДокумент28 страницSine Wave PWM (SPWM) Circuit Using Opamp - Homemade Circuit Projectsdudulemarc100% (1)
- Tda2052 AmplificadorДокумент13 страницTda2052 AmplificadorTony RamirezОценок пока нет
- Resistor Colour CodeДокумент1 страницаResistor Colour CodedudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ9 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- An 4176 PDFДокумент21 страницаAn 4176 PDFdudulemarcОценок пока нет
- Transistor AF and RF Circuits - Allan Lytel PDFДокумент127 страницTransistor AF and RF Circuits - Allan Lytel PDFYou Look100% (1)
- Parametric Amplification With TransistorsДокумент2 страницыParametric Amplification With TransistorsdudulemarcОценок пока нет
- Noise Can Cell Eat I On TechniquesДокумент4 страницыNoise Can Cell Eat I On TechniquesdudulemarcОценок пока нет
- Aeromodelling 1 PDFДокумент158 страницAeromodelling 1 PDFArsyil AxelОценок пока нет
- Using Scopes in Transistor Circuits - Robert G. MiddletonДокумент190 страницUsing Scopes in Transistor Circuits - Robert G. MiddletondudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ13 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- VHF TechniqueДокумент100 страницVHF TechniquedudulemarcОценок пока нет
- BelowTenMetersTheManualOfUltra Short Wave Radio PDFДокумент72 страницыBelowTenMetersTheManualOfUltra Short Wave Radio PDF_lucky_Оценок пока нет
- Aeromodelling 1 PDFДокумент158 страницAeromodelling 1 PDFArsyil AxelОценок пока нет
- Efratom FRK RB ClockДокумент46 страницEfratom FRK RB ClockdudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ8 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ8 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ5 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ13 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- SX1276/77/78 - Long Range Transceiver ModuleДокумент1 страницаSX1276/77/78 - Long Range Transceiver ModuleItalo SantosОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ17 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ9 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ32 страницыTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ9 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Документ19 страницTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007dudulemarcОценок пока нет
- DK1163ch5 PDFДокумент28 страницDK1163ch5 PDFdudulemarcОценок пока нет
- Lec 5Документ8 страницLec 5dudulemarcОценок пока нет
- 02 Le Char 2CДокумент55 страниц02 Le Char 2CdudulemarcОценок пока нет
- MSE 310 - Part3 - (Student) - FilledДокумент22 страницыMSE 310 - Part3 - (Student) - FilledaaaОценок пока нет
- Item 1 - Flk2acДокумент2 страницыItem 1 - Flk2acvnbioОценок пока нет
- AN218 Vehicle Detection Using AMR SensorsДокумент10 страницAN218 Vehicle Detection Using AMR SensorsIndra Panggalo100% (1)
- Work Experience:: Jay-Ar Cuevas SalveДокумент2 страницыWork Experience:: Jay-Ar Cuevas SalveJay-Ar Cuevas Salve100% (1)
- Ground EMI Filters GLE30-1Документ2 страницыGround EMI Filters GLE30-1Jung BrianОценок пока нет
- Mini Project EEE PDFДокумент7 страницMini Project EEE PDFAmit Kr SinghОценок пока нет
- Part 1 General Electrical Specification v4Документ15 страницPart 1 General Electrical Specification v4godspower brunoОценок пока нет
- Computer and Electronic Repair Guide RecommendationsДокумент69 страницComputer and Electronic Repair Guide Recommendationsfrigui ali100% (1)
- Logic GatesДокумент8 страницLogic GatesNikunj ThakkarОценок пока нет
- Valvulas Saturno 2011 PDFДокумент2 страницыValvulas Saturno 2011 PDFJose Ignacio Ancalaf RainОценок пока нет
- Ec Fans: Operating ManualДокумент48 страницEc Fans: Operating ManualMihai Butnaru-Palade100% (1)
- Diagramas Esquematicos TV LED LGДокумент49 страницDiagramas Esquematicos TV LED LGLuis Alonso Rosero Velez100% (1)
- MVS-8000X-C MVS-7000X-CДокумент26 страницMVS-8000X-C MVS-7000X-CAbdul MuizzОценок пока нет
- Modular Ot Room-JinyiДокумент7 страницModular Ot Room-JinyiMasfia AgtОценок пока нет
- Calculate current flow in an earth fault circuitДокумент171 страницаCalculate current flow in an earth fault circuitDev DragosОценок пока нет
- Radio Frequency Over Optical FiberДокумент31 страницаRadio Frequency Over Optical Fibersiva kumar mandhatiОценок пока нет
- Voltage Regulator: Semiconductor Technical DataДокумент9 страницVoltage Regulator: Semiconductor Technical DataEnriqueОценок пока нет
- Three-Phase Motor Drives: Electricity and New EnergyДокумент44 страницыThree-Phase Motor Drives: Electricity and New EnergySONU KUMARОценок пока нет
- SR208C PDFДокумент35 страницSR208C PDFAngel Pérez SantiagoОценок пока нет
- Power Factor Lec 2Документ12 страницPower Factor Lec 2kinyanjuimeru27Оценок пока нет
- XR Aluma ProДокумент36 страницXR Aluma ProrysogtОценок пока нет
- Single Earth Wire Return System PowerPointДокумент16 страницSingle Earth Wire Return System PowerPointlbk50Оценок пока нет
- DN034Документ29 страницDN034Roberto FelicioОценок пока нет
- Solar Electric Technician, Level-I SyllabusДокумент28 страницSolar Electric Technician, Level-I Syllabusrosan.sapkotaОценок пока нет
- Toroidal Transformer 25VA Series/ParallelДокумент1 страницаToroidal Transformer 25VA Series/ParallelmittyОценок пока нет
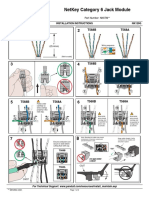
- Install Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEДокумент2 страницыInstall Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEMonte PlataОценок пока нет
- 7011a 6-10kva SpecsДокумент10 страниц7011a 6-10kva SpecsOscar MorenoОценок пока нет
- Chapter 5 Part 2Документ10 страницChapter 5 Part 2george manОценок пока нет
- Albany 03 05 08 - RefДокумент2 страницыAlbany 03 05 08 - RefJulio VergaraОценок пока нет
- Kda03 PRJ11Документ32 страницыKda03 PRJ11milanlapovo100% (1)