Вам также может понравиться
- Problem StatementДокумент9 страницProblem StatementTauseef Gillani100% (1)
- A Project Report On "Modelling of Fact Device For Power Flow Analysis"Документ45 страницA Project Report On "Modelling of Fact Device For Power Flow Analysis"gopalchandramahatoОценок пока нет
- Thyripart SiemensДокумент30 страницThyripart SiemensAshraf IrfanОценок пока нет
- Power 53: of TheДокумент8 страницPower 53: of TheTrương Xuân QuýОценок пока нет
- Identification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012Документ8 страницIdentification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012gabriveragОценок пока нет
- Determination of Emergency Power System Voltage Control ActionsДокумент6 страницDetermination of Emergency Power System Voltage Control ActionsLinda Carolina VasconezОценок пока нет
- Direct Stability Analysis of Electric Power Systems Using Energy FunctionsДокумент3 страницыDirect Stability Analysis of Electric Power Systems Using Energy Functionsez55Оценок пока нет
- State Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsДокумент7 страницState Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsVarikunta Saikrishna ee22d032Оценок пока нет
- Power Flow Method PaperДокумент1 страницаPower Flow Method Papermr ozairОценок пока нет
- Power System Dynamic Response Calculations: in M Each Involves in PerhapsДокумент23 страницыPower System Dynamic Response Calculations: in M Each Involves in Perhapsjuan LuisОценок пока нет
- CIRED2009 0518 PaperДокумент4 страницыCIRED2009 0518 PapersrivaishnaviОценок пока нет
- Prediction of Critical Clearing Time Using Artificial Neural NetworkДокумент5 страницPrediction of Critical Clearing Time Using Artificial Neural NetworkSaddam HussainОценок пока нет
- Analytical Tools For Power System RestorationДокумент7 страницAnalytical Tools For Power System Restorationeorea1341Оценок пока нет
- Computer Aided Transient Stability AnalysisДокумент5 страницComputer Aided Transient Stability AnalysisViresh PatelОценок пока нет
- Introduction To Electromagnetic Transient Analysis of Power SystemsДокумент8 страницIntroduction To Electromagnetic Transient Analysis of Power Systemsअंकित अरोड़ाОценок пока нет
- Congestion Management in A Deregulated Environment Using Corrective MeasuresДокумент6 страницCongestion Management in A Deregulated Environment Using Corrective Measuresapi-3697505Оценок пока нет
- Benidris-Mitra-Etal Qcomp Rel td16Документ5 страницBenidris-Mitra-Etal Qcomp Rel td16KHALIQ AHMEDОценок пока нет
- Ot Omega 2007Документ2 страницыOt Omega 2007Diogo MarujoОценок пока нет
- SGLBT2020Документ10 страницSGLBT2020Choir SingerОценок пока нет
- Generator Dispatch by Sensitivity MethodДокумент7 страницGenerator Dispatch by Sensitivity MethodHans John DcruzОценок пока нет
- Short Circuit Levels Adequation by Network Topology Modifications Using Genetic AlgorithmsДокумент6 страницShort Circuit Levels Adequation by Network Topology Modifications Using Genetic AlgorithmsAnugrah PratamaОценок пока нет
- A Generalised Approach To Transient Security Enhancement in Power MarketsДокумент7 страницA Generalised Approach To Transient Security Enhancement in Power Marketsapi-3697505Оценок пока нет
- AssignmentДокумент9 страницAssignmentengr_maK786Оценок пока нет
- Transient Stability Analysis Using MiPowerДокумент5 страницTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- Transient Stability Margin Prediction Using Equal-Area CriterionДокумент9 страницTransient Stability Margin Prediction Using Equal-Area CriterionVerruumm AmineОценок пока нет
- 2012 PES PowerДокумент8 страниц2012 PES Powersf111Оценок пока нет
- Video 6 PDFДокумент2 страницыVideo 6 PDFBalram RautОценок пока нет
- Reconfiguring Electric Distribution SystemsДокумент8 страницReconfiguring Electric Distribution SystemsMohammed ShifulОценок пока нет
- Carga Frecuencia USAДокумент8 страницCarga Frecuencia USAcastrojpОценок пока нет
- CH03 ElectricPowerSystemConceptsforTelecommunicationEngineers v2Документ4 страницыCH03 ElectricPowerSystemConceptsforTelecommunicationEngineers v2u235861Оценок пока нет
- Powersystem Op and ConДокумент17 страницPowersystem Op and Consurya892Оценок пока нет
- Study of Power System Security in Indian Utility 62 Bus SystemДокумент10 страницStudy of Power System Security in Indian Utility 62 Bus SystempjОценок пока нет
- Contingency Analysis in Power System and Remedial ActionsДокумент7 страницContingency Analysis in Power System and Remedial ActionsnkanyisoОценок пока нет
- Frequency Responsive Demand in U.S. Western Power System ModelДокумент5 страницFrequency Responsive Demand in U.S. Western Power System ModelMortuzaОценок пока нет
- Science 3Документ7 страницScience 3maryam524Оценок пока нет
- Time Optimal SchedulingДокумент7 страницTime Optimal SchedulingLakshmi NarayananОценок пока нет
- Stochastic Contingency Assessment for Demand Management ContractsДокумент1 страницаStochastic Contingency Assessment for Demand Management ContractsDr. Sc. Nestor GonzalezОценок пока нет
- Small Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurДокумент5 страницSmall Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurAuspiciousОценок пока нет
- 14 Vol 39 No 1Документ10 страниц14 Vol 39 No 1Sarah DewiОценок пока нет
- Mixed Transient Stability Analysis Using AC and DC ModelsДокумент7 страницMixed Transient Stability Analysis Using AC and DC ModelsAbid Ali DogarОценок пока нет
- Load Flow Analysis PDFДокумент58 страницLoad Flow Analysis PDFfathonixОценок пока нет
- A Genetic Algorithm For Solving The Optimal Power Flow ProblemДокумент14 страницA Genetic Algorithm For Solving The Optimal Power Flow ProblemJoe RanteОценок пока нет
- Optimal Load Frequency Control in A SingleДокумент6 страницOptimal Load Frequency Control in A SingleDr. Ulaganathan.M, AP /EEEОценок пока нет
- Optimal Location and Capacity of STATCOM For Voltage Stability Enhancement Using ACO Plus GAДокумент6 страницOptimal Location and Capacity of STATCOM For Voltage Stability Enhancement Using ACO Plus GAsivasankartikkuОценок пока нет
- Fuzzy Logic For Single AreaДокумент11 страницFuzzy Logic For Single Areaabata yohannesОценок пока нет
- A Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemДокумент6 страницA Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemBogdan VicolОценок пока нет
- Bretas A.S. Artificial Neural Networks in Power System RestorationДокумент6 страницBretas A.S. Artificial Neural Networks in Power System RestorationNibedita ChatterjeeОценок пока нет
- Knowledge-Based Methodology For Intelligent Sequence SwitchingДокумент6 страницKnowledge-Based Methodology For Intelligent Sequence SwitchingAbbasОценок пока нет
- A Genetic Algorithm For Solving The Optimal Power Flow ProblemДокумент15 страницA Genetic Algorithm For Solving The Optimal Power Flow Problemnirmal_inboxОценок пока нет
- Weak Bus For STATCOMДокумент7 страницWeak Bus For STATCOMChâu TúОценок пока нет
- Optimal network reconfiguration reduces power lossesДокумент16 страницOptimal network reconfiguration reduces power lossesMarulasiddappa H BОценок пока нет
- Transient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic PDFДокумент6 страницTransient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic PDFNirmal mehtaОценок пока нет
- Design of Electric Power System Studies Using Mipower SoftwareДокумент7 страницDesign of Electric Power System Studies Using Mipower SoftwareRonish ChandraОценок пока нет
- 00575683.pdf Isnumber 12472&prod JNL&arnumber 575683&arst 558&ared 566&arauthor Gezgin,+C. +Heck,+B.S. +Bass,+R.MДокумент9 страниц00575683.pdf Isnumber 12472&prod JNL&arnumber 575683&arst 558&ared 566&arauthor Gezgin,+C. +Heck,+B.S. +Bass,+R.MJulián Peláez RestrepoОценок пока нет
- An Intelligent Load Shedding Ils System Application in A Large IДокумент9 страницAn Intelligent Load Shedding Ils System Application in A Large IManoj RОценок пока нет
- (IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikДокумент6 страниц(IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikIJETA - EighthSenseGroup100% (1)
- A Multiagent System Approach and Integer Linear Programming For Transformers Relocation in Power Distribution SystemДокумент6 страницA Multiagent System Approach and Integer Linear Programming For Transformers Relocation in Power Distribution SystemEdna LópezОценок пока нет
- Reactive Power ControlДокумент6 страницReactive Power ControlMANPAYAОценок пока нет
- 3.5 KumarДокумент7 страниц3.5 KumarfernandokgОценок пока нет
- Remedial Dan DefenseДокумент10 страницRemedial Dan DefenseAvner ChristianОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Optimization and machine learning for load restorationДокумент10 страницOptimization and machine learning for load restorationJesusTJОценок пока нет
- Vulnerability Analysis Related ToДокумент6 страницVulnerability Analysis Related ToJesusTJОценок пока нет
- SC and SW Series Contactors Data SheetДокумент35 страницSC and SW Series Contactors Data SheetJesusTJОценок пока нет
- DIALUXpdfДокумент48 страницDIALUXpdfAikaterineGreaceОценок пока нет
- DS8200 Standard EU enДокумент8 страницDS8200 Standard EU enJesusTJОценок пока нет
- Study Plan: Academic Background: I Have Completed My Undergraduate Studies in Electrical ComputerДокумент5 страницStudy Plan: Academic Background: I Have Completed My Undergraduate Studies in Electrical ComputerNaseer AhmadОценок пока нет
- EE306 Power System Analysis PDFДокумент2 страницыEE306 Power System Analysis PDFCharles Joseph LukeОценок пока нет
- Reference-HI Wave PDFДокумент96 страницReference-HI Wave PDFangel lozadaОценок пока нет
- 5 Bus Homework on Capacitors & TransformersДокумент2 страницы5 Bus Homework on Capacitors & TransformershafizgОценок пока нет
- E-001 Electrical SystemДокумент112 страницE-001 Electrical SystemJeong Hui Lee100% (1)
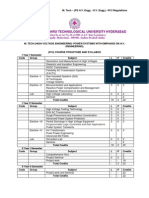
- M. Tech Regulations for HV EngineeringДокумент24 страницыM. Tech Regulations for HV EngineeringSal ExcelОценок пока нет
- AplДокумент34 страницыAplJAY PARIKHОценок пока нет
- Circuit Breacker 1Документ156 страницCircuit Breacker 1Paulo Cesar100% (1)
- NetSure 501 DatasheetДокумент2 страницыNetSure 501 DatasheetAnnBlissОценок пока нет
- 24 Pulse Ac DC Converters For Improved PДокумент6 страниц24 Pulse Ac DC Converters For Improved Pdebasisbasu KHARAGPURMETALSОценок пока нет
- NTPC Training ReportДокумент39 страницNTPC Training ReportAshish Singh73% (15)
- Power System Analysis and Stability Subject Question BankДокумент7 страницPower System Analysis and Stability Subject Question BankNaveen RajОценок пока нет
- Teleproteção CIGRÉ2000Документ172 страницыTeleproteção CIGRÉ2000Ricardo PossidonioОценок пока нет
- C57 129-1999 PDFДокумент39 страницC57 129-1999 PDFEdwin CapdepomtОценок пока нет
- BE - 505 B.E. V Semester Mid Term Examination, Sep. 2014: Power System IДокумент1 страницаBE - 505 B.E. V Semester Mid Term Examination, Sep. 2014: Power System Ipragatijoshi30Оценок пока нет
- Development of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG ModelsДокумент7 страницDevelopment of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG Modelssrinivasa rathnamОценок пока нет
- PsocДокумент1 страницаPsocGayan ShashiОценок пока нет
- MD - 80 Sistema ElectricoДокумент150 страницMD - 80 Sistema ElectricoAR Emmanuel100% (5)
- EE2404 Power System Simulation Lab ProgramsДокумент121 страницаEE2404 Power System Simulation Lab ProgramsSachin Samy0% (1)
- DC Microgride ProtectionДокумент7 страницDC Microgride ProtectionSuco MuzenzaОценок пока нет
- 6672 TransmissionLine DH 20150210 Web2 PDFДокумент18 страниц6672 TransmissionLine DH 20150210 Web2 PDFAhmed SamirОценок пока нет
- Power System Grounding ExplainedДокумент11 страницPower System Grounding ExplainedBisal Sarker JoyОценок пока нет
- Loadbreak Apparatus Connectors: 200 A 25 KV Class Loadbreak Bushing InsertДокумент2 страницыLoadbreak Apparatus Connectors: 200 A 25 KV Class Loadbreak Bushing InsertkarimakkiОценок пока нет
- April 2011Документ7 страницApril 2011Anonymous gud2poОценок пока нет
- Short-Term Load ForecastingДокумент10 страницShort-Term Load ForecastingJanna Pauline Garcia PueblasОценок пока нет
- Electric Power Systems. Vol. I. Electric NetworksДокумент843 страницыElectric Power Systems. Vol. I. Electric Networksluciantoma75% (4)
- Resistive Reach Guidelines For Distance ProtectionДокумент7 страницResistive Reach Guidelines For Distance ProtectionEdmund Stokes-Waller0% (1)
- Inertia and RoCoF - v17 - EnTSOДокумент48 страницInertia and RoCoF - v17 - EnTSOfabriani10Оценок пока нет