Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Motors and Drives A Practical Technology Guide Dave PolkaДокумент387 страницMotors and Drives A Practical Technology Guide Dave Polkamurad6a9100% (9)
- ABB Protection Application HandbookДокумент356 страницABB Protection Application HandbookSyed Muhammad Munavvar HussainОценок пока нет
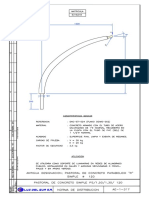
- AE-1-317 Pastoral Concreto ParabolicoДокумент1 страницаAE-1-317 Pastoral Concreto ParabolicoEasy Energy SAC100% (1)
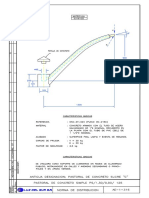
- AE-1-318 Pastoral Concreto ParabolicoДокумент1 страницаAE-1-318 Pastoral Concreto ParabolicoEasy Energy SACОценок пока нет
- AE-1-335 Pastoral Sucre TripleДокумент1 страницаAE-1-335 Pastoral Sucre TripleEasy Energy SACОценок пока нет
- AE-1-316 Pastoral Simple ConcretoДокумент1 страницаAE-1-316 Pastoral Simple ConcretoEasy Energy SACОценок пока нет
- AE-1-340 Pastoral Acero Simple LargoДокумент1 страницаAE-1-340 Pastoral Acero Simple LargoEasy Energy SACОценок пока нет
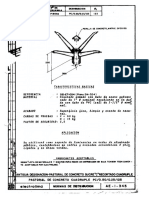
- AE 1 315 Pastoral SucreДокумент1 страницаAE 1 315 Pastoral SucreEasy Energy SACОценок пока нет
- AE-1-325 Pastoral Sucre DobleДокумент1 страницаAE-1-325 Pastoral Sucre DobleEasy Energy SACОценок пока нет
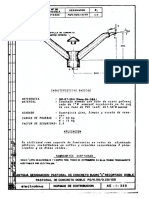
- AE 1 310 Pastorales MetalicosДокумент4 страницыAE 1 310 Pastorales MetalicosEasy Energy SACОценок пока нет
- Ad 1 007Документ10 страницAd 1 007leonardovegaОценок пока нет
- AE-1-336 Pastoral Sucre TripleДокумент1 страницаAE-1-336 Pastoral Sucre TripleEasy Energy SACОценок пока нет
- AE-1-345 Pastoral Sucre CuadrupleДокумент1 страницаAE-1-345 Pastoral Sucre CuadrupleEasy Energy SACОценок пока нет
- AE-1-347 Pastoral Acero Simple CortoДокумент1 страницаAE-1-347 Pastoral Acero Simple CortoEasy Energy SACОценок пока нет
- Licht Hand BuchДокумент298 страницLicht Hand BuchsumanthdixitОценок пока нет
- Matlab Data IoДокумент11 страницMatlab Data IoEasy Energy SACОценок пока нет
- Simulink - Applications PDFДокумент17 страницSimulink - Applications PDFEasy Energy SACОценок пока нет
- A MATLAB Primer in Four Hours With Practical ExamplesДокумент23 страницыA MATLAB Primer in Four Hours With Practical ExamplesMudasir QureshiОценок пока нет
- Electrical Equipment Handbook-7-Speed Control of Induction MotorsДокумент12 страницElectrical Equipment Handbook-7-Speed Control of Induction MotorsEasy Energy SACОценок пока нет
- Nema mg-1 2009Документ671 страницаNema mg-1 2009Erick LeónОценок пока нет
- Dunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Документ10 страницDunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Easy Energy SACОценок пока нет
- MATLAB Training CourseДокумент7 страницMATLAB Training CourseEasy Energy SACОценок пока нет
- Matlab Data IoДокумент11 страницMatlab Data IoEasy Energy SACОценок пока нет
- Electrical TransmissionДокумент851 страницаElectrical TransmissionAsif100% (6)
- IEEE Task Force - Current Usage & Suggested Practices in Power System Stability Simulations For Synchronous Machines, 1986Документ17 страницIEEE Task Force - Current Usage & Suggested Practices in Power System Stability Simulations For Synchronous Machines, 1986Edinson Herrera VasquezОценок пока нет
- NAPS 2000 - Park PDFДокумент15 страницNAPS 2000 - Park PDFJacob CarterОценок пока нет
- Electric Power GenerationДокумент257 страницElectric Power GenerationJaber ElabbasОценок пока нет
- Control System Documentation - SДокумент242 страницыControl System Documentation - SEasy Energy SACОценок пока нет