Вам также может понравиться
- Curso PLC BÃ - SICO 2Документ80 страницCurso PLC BÃ - SICO 2Christian GalindoОценок пока нет
- Estructura Externa e Interna de Los PLCДокумент7 страницEstructura Externa e Interna de Los PLCYair Cardenas RicoОценок пока нет
- Taller 12Документ95 страницTaller 12Manûû PatîñôОценок пока нет
- Omron Guia Rápida CP1L ProgramaciónДокумент165 страницOmron Guia Rápida CP1L ProgramaciónFernando Jaime Alonso MartínezОценок пока нет
- Examen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinДокумент14 страницExamen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDarwin Yonel Mamani SalcedoОценок пока нет
- Aplicaciones Básicas Variadores de VelocidadДокумент11 страницAplicaciones Básicas Variadores de Velocidadvicente manuel castello bioscaОценок пока нет
- Ejercicios SFCДокумент38 страницEjercicios SFCalexm4100% (1)
- Manual Neumatica Automatizacion Logica Programable TecsupДокумент34 страницыManual Neumatica Automatizacion Logica Programable Tecsupjualt_velazugОценок пока нет
- Practic As Step 7 SiemensДокумент42 страницыPractic As Step 7 SiemensHoracio DavidОценок пока нет
- Curso Basico S7-200Документ66 страницCurso Basico S7-200Ramiro Victoria Alvarez100% (1)
- ¿Qué Es Un Controlador Lógico Programable (PLC) ?Документ32 страницы¿Qué Es Un Controlador Lógico Programable (PLC) ?Jose0% (1)
- FabelecДокумент48 страницFabelecSebastian Andres Monsalves Riquelme100% (1)
- CURSO DE Omron PDFДокумент79 страницCURSO DE Omron PDFDiego MayorgaОценок пока нет
- MicroLogix 1100 - 1763Документ4 страницыMicroLogix 1100 - 1763gamh130% (1)
- 4 Pasos para Enlazar El Studio 5000, FactoryTalk View y Emulate 5000Документ26 страниц4 Pasos para Enlazar El Studio 5000, FactoryTalk View y Emulate 5000I.E.I. AlEjAnDrO CoNtReRaS GaRcIaОценок пока нет
- Reporte Practicas Siemens Step 7 PLCДокумент7 страницReporte Practicas Siemens Step 7 PLCAmisadai PCОценок пока нет
- Sesion13 Lenguajes de Programacion PLCДокумент12 страницSesion13 Lenguajes de Programacion PLCFabian AlejandroОценок пока нет
- Reporte Practicas Allen Bradley Micrologix PLCДокумент13 страницReporte Practicas Allen Bradley Micrologix PLCAmisadai PCОценок пока нет
- Siemens PLC LogoДокумент26 страницSiemens PLC LogoDouglas SotezОценок пока нет
- Modulo Cortadora CODESYS GRAFCETДокумент16 страницModulo Cortadora CODESYS GRAFCETAlternador AlternadoОценок пока нет
- Ejercicios Esquemas ElecДокумент3 страницыEjercicios Esquemas ElecLuis GustavoОценок пока нет
- Taller TIA Portal V 13 BasicoДокумент86 страницTaller TIA Portal V 13 BasicoJosé Luis Rosales GonzálezОценок пока нет
- Flip FlopsДокумент16 страницFlip FlopsVictor Hugo López CanОценок пока нет
- Configuración y Puesta en Marcha Del Variador de Velocidad Vía Profibus DP Con PLCДокумент19 страницConfiguración y Puesta en Marcha Del Variador de Velocidad Vía Profibus DP Con PLCDuvan Jimenez Giraldo100% (1)
- Cuestionario PLC COMPACT FESTOДокумент2 страницыCuestionario PLC COMPACT FESTOAdrianОценок пока нет
- Arrancadores Suaves Parte 1Документ6 страницArrancadores Suaves Parte 1Bruno VeraОценок пока нет
- Contadores Multi-InstanciaДокумент30 страницContadores Multi-InstanciaJorge VargasОценок пока нет
- Guia Laboratorios de PLC LogoДокумент23 страницыGuia Laboratorios de PLC Logoluis garcesОценок пока нет
- Reporte Proyecto Final Automatizacion de TolvasДокумент10 страницReporte Proyecto Final Automatizacion de TolvasAlejandro GuerreroОценок пока нет
- Diapositivas GRAFCETДокумент50 страницDiapositivas GRAFCETLeonard KevОценок пока нет
- Tia v13 BasicoДокумент36 страницTia v13 Basicolordwhite100% (1)
- Automata Omron PDFДокумент373 страницыAutomata Omron PDFranciomanolo100% (1)
- NRP ControladorДокумент36 страницNRP ControladorYohana EspinozaОценок пока нет
- Diagramas de Escalera para PLCДокумент24 страницыDiagramas de Escalera para PLCalienarandas123Оценок пока нет
- Si Eres Nuevo en El PLCДокумент18 страницSi Eres Nuevo en El PLCfran1983201050% (2)
- Manual Básico de Programación en Labview Por MasterhacksДокумент84 страницыManual Básico de Programación en Labview Por Masterhacksjonathan_calixto_4Оценок пока нет
- Ie-812 - PLC en CadesimuДокумент10 страницIe-812 - PLC en CadesimuKevin Daniel Escober Torres100% (1)
- Ejercicios Con Step 7Документ66 страницEjercicios Con Step 7Nicolas Toledano Brito100% (1)
- Manual Practico PLCДокумент57 страницManual Practico PLCMarco ReyesОценок пока нет
- Manual Primer NivelДокумент64 страницыManual Primer Niveljofer640204Оценок пока нет
- Tarea 1. Introducción A La AutomatizaciónДокумент10 страницTarea 1. Introducción A La AutomatizaciónFelipe RomeroОценок пока нет
- Manual CP1LДокумент182 страницыManual CP1LFernando Jaime Alonso Martínez100% (1)
- Logix ProДокумент7 страницLogix ProCinthia Cruz RamirezОценок пока нет
- Guía Rápida de CX-Programmer CON EJEMPLOSДокумент16 страницGuía Rápida de CX-Programmer CON EJEMPLOSManuel Angel GilОценок пока нет
- Accionamientos Electricos IДокумент55 страницAccionamientos Electricos IJr Hernandez100% (1)
- Planta EmbotelladoraДокумент12 страницPlanta EmbotelladoraMiguel Enrique Dosman ColoradoОценок пока нет
- Curso Básico Micrologix 1500Документ43 страницыCurso Básico Micrologix 1500Héctor Juárez Hernández100% (1)
- Manual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoДокумент13 страницManual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoEleazar CosmeОценок пока нет
- Curso Simatic S7300 Parte I PDFДокумент98 страницCurso Simatic S7300 Parte I PDFingrid pereda100% (2)
- E-322 Final-Mod1 PLC AvanzadoДокумент130 страницE-322 Final-Mod1 PLC AvanzadoHéctor CaríasОценок пока нет
- Curso Basico PLCДокумент45 страницCurso Basico PLCJosé Luis ArévaloОценок пока нет
- Capacitacion Allen BradleyДокумент2 страницыCapacitacion Allen BradleyMaurilio Medina Roque50% (4)
- Tarea 1-U6 PLC - Controlador Logico ProgramableДокумент4 страницыTarea 1-U6 PLC - Controlador Logico ProgramableChristian Eduardo Sanchez Sandoval100% (1)
- Que Es y para Qué Sirve Un PLC?Документ8 страницQue Es y para Qué Sirve Un PLC?Jorge HerreraОценок пока нет
- Exposicion Del PLCДокумент8 страницExposicion Del PLCGianny0% (1)
- Tipos de PLCДокумент9 страницTipos de PLCEdison LazОценок пока нет
- Consultas PLCДокумент5 страницConsultas PLCJorge MartínezОценок пока нет
- Laboratorio de Control ¿Qué Es Un PLCДокумент7 страницLaboratorio de Control ¿Qué Es Un PLCKapi096Оценок пока нет
- Unidad 6 Controles Electricos Luis Alexis Chable GonzalezДокумент26 страницUnidad 6 Controles Electricos Luis Alexis Chable GonzalezAlexis GonzalezОценок пока нет
- Caracteristicas P715Документ4 страницыCaracteristicas P715Alexandra chata monsalve momsalveОценок пока нет
- Cafeteria Del CampoДокумент120 страницCafeteria Del CampoAlexandra chata monsalve momsalveОценок пока нет
- Identificación Del Nicho de Mercado para La Creación de Una Empresa de Smoothies SaludablesДокумент82 страницыIdentificación Del Nicho de Mercado para La Creación de Una Empresa de Smoothies SaludablesAlexandra chata monsalve momsalveОценок пока нет
- Canvas Business Model Infographics by SlidesgoДокумент34 страницыCanvas Business Model Infographics by SlidesgoAlexandra chata monsalve momsalveОценок пока нет
- Plan de Negocios Batidos Détox PDFДокумент66 страницPlan de Negocios Batidos Détox PDFRafaelОценок пока нет
- CONTENTS CompressedДокумент3 страницыCONTENTS CompressedAlexandra chata monsalve momsalveОценок пока нет
- Manual Rozadora Uso Draft01Документ165 страницManual Rozadora Uso Draft01Alexandra chata monsalve momsalveОценок пока нет
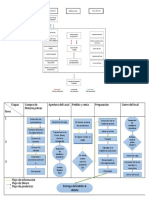
- Flujo GramaДокумент2 страницыFlujo GramaAlexandra chata monsalve momsalveОценок пока нет
- Tic y RSCДокумент30 страницTic y RSCAlexandra chata monsalve momsalveОценок пока нет
- Ver Imp MOD016Документ24 страницыVer Imp MOD016Alexandra chata monsalve momsalveОценок пока нет
- Solucionario Sistemas Auxiliares Del Motor UNI 1Документ6 страницSolucionario Sistemas Auxiliares Del Motor UNI 1Jean Giraldo100% (1)
- ST0451Документ38 страницST0451Alexandra chata monsalve momsalveОценок пока нет
- Solucionario Sistemas Auxiliares Del Motor UNI 1Документ6 страницSolucionario Sistemas Auxiliares Del Motor UNI 1Jean Giraldo100% (1)
- Caso MOD016Документ5 страницCaso MOD016Alexandra chata monsalve momsalveОценок пока нет
- Actividad Grupal 04Документ4 страницыActividad Grupal 04Alexandra chata monsalve momsalveОценок пока нет
- Portada TecnologiaДокумент17 страницPortada TecnologiaAlexandra chata monsalve momsalveОценок пока нет
- Logo de Los BeatlesДокумент3 страницыLogo de Los BeatlesAlexandra chata monsalve momsalveОценок пока нет
- Evaluación 2 - Actividad 6Документ10 страницEvaluación 2 - Actividad 6Alexandra chata monsalve momsalveОценок пока нет
- Estudio de Inversión y FinanciamientoДокумент2 страницыEstudio de Inversión y FinanciamientoAlexandra chata monsalve momsalveОценок пока нет
- Dialnet ResponsabilidadSocialEmpresarialEInnovacion 5262497Документ10 страницDialnet ResponsabilidadSocialEmpresarialEInnovacion 5262497Alexandra chata monsalve momsalveОценок пока нет
- ExplicaciónДокумент1 страницаExplicaciónAlexandra chata monsalve momsalveОценок пока нет
- Asignacion 3Документ8 страницAsignacion 3Alexandra chata monsalve momsalveОценок пока нет
- Indicadores de EficaciaДокумент1 страницаIndicadores de EficaciaAlexandra chata monsalve momsalveОценок пока нет
- Guion RRHH 2Документ8 страницGuion RRHH 2Alexandra chata monsalve momsalveОценок пока нет
- 3-3 Intrumentacion AlexandraДокумент4 страницы3-3 Intrumentacion AlexandraAlexandra chata monsalve momsalveОценок пока нет
- RRHHДокумент45 страницRRHHAlexandra chata monsalve momsalveОценок пока нет
- ACTIVIDADДокумент1 страницаACTIVIDADAlexandra chata monsalve momsalveОценок пока нет
- Evaluacion 2 - Actividad 5Документ6 страницEvaluacion 2 - Actividad 5Alexandra chata monsalve momsalveОценок пока нет
- RRHHДокумент26 страницRRHHAlexandra chata monsalve momsalveОценок пока нет
- RRHH 2Документ23 страницыRRHH 2Alexandra chata monsalve momsalveОценок пока нет
- Arquitectura HarvardДокумент11 страницArquitectura Harvardsergio damianОценок пока нет
- Lectura 3Документ37 страницLectura 3Pablo SeitzОценок пока нет
- Sesion 06 - Modelo de Casos de Uso-Relaciones - SolucionДокумент2 страницыSesion 06 - Modelo de Casos de Uso-Relaciones - SolucionNīsu KaseneОценок пока нет
- Sistema Identificador de ViasДокумент2 страницыSistema Identificador de ViasJhon JanerОценок пока нет
- Problemas de BioingenieríaДокумент2 страницыProblemas de BioingenieríaVictor RamirezОценок пока нет
- Sistema de Informacion Organizacional Tp1Документ6 страницSistema de Informacion Organizacional Tp1Julieta Herrera67% (6)
- Instalacion - Educativa - RedusersДокумент7 страницInstalacion - Educativa - RedusersJosé Adrián Lligoña BoschОценок пока нет
- Proyecto Final de Ingenieria de La CalidadДокумент18 страницProyecto Final de Ingenieria de La CalidadWilson Jose Aguin GuerraОценок пока нет
- El Método de LeontiefДокумент16 страницEl Método de Leontiefカリイオ ヘクトルОценок пока нет
- Conta PlusДокумент52 страницыConta PlusPamelita RojasОценок пока нет
- Mate2 TablaДокумент5 страницMate2 TablaAry RosasОценок пока нет
- UML - Diagramas de Clases - Ejercicio 1Документ6 страницUML - Diagramas de Clases - Ejercicio 1Ariel VergaraОценок пока нет
- 4 PatronesДокумент20 страниц4 PatronesAdolfo Alarcón BadillaОценок пока нет
- Lanzamiento VISAДокумент20 страницLanzamiento VISAEsteban Falcon AndradeОценок пока нет
- Terminación de BuclesДокумент7 страницTerminación de BuclesBrandon SCОценок пока нет
- SybaseДокумент30 страницSybaseSonia Christina100% (1)
- Un Poema para RecordarДокумент3 страницыUn Poema para RecordarAntonio BretonОценок пока нет
- 25 PYTHON Parte 3Документ33 страницы25 PYTHON Parte 3Romina GómezОценок пока нет
- Notas de Algebra-GentileДокумент669 страницNotas de Algebra-GentileCelia Fasce100% (2)
- Fibra MultiplexoresДокумент12 страницFibra Multiplexoreswilliam abel taboada gambiniОценок пока нет
- CaratulaДокумент12 страницCaratulaJesus Miguel Lujan FalconОценок пока нет
- Vincent Mosco Big Data y Cultura de La NubeДокумент35 страницVincent Mosco Big Data y Cultura de La NubeAnonymous 0muqIU100% (1)
- Presentacion de Internet y Motores de BusquedasДокумент25 страницPresentacion de Internet y Motores de BusquedasManuel Martín Jimenez RiquelmeОценок пока нет
- Link A Instrucciones de Devolución Por País LIVE - Google DriveДокумент1 страницаLink A Instrucciones de Devolución Por País LIVE - Google DriveLic. Isaac FarfanОценок пока нет
- El Nuevo Rol Del CIO de Director de Informatica A Lider EstrategicoДокумент15 страницEl Nuevo Rol Del CIO de Director de Informatica A Lider EstrategicoserviocuevasОценок пока нет
- Capitulo 3Документ8 страницCapitulo 3Jhon Manuel MirandaОценок пока нет
- Traspuesta de Una Matrizy DemostracionesДокумент13 страницTraspuesta de Una Matrizy DemostracionesJose FernandezОценок пока нет
- Cadenas o StringДокумент6 страницCadenas o StringJocker RCОценок пока нет
- Evalúa Algunos Aspectos Del Siguiente Correo ElectrónicoДокумент3 страницыEvalúa Algunos Aspectos Del Siguiente Correo ElectrónicoNANI PEKINОценок пока нет
- Base de Datos ProyectoДокумент21 страницаBase de Datos ProyectoGarcía AndresОценок пока нет