Вам также может понравиться
- Exercices Corriges Mecanique Du Point PDFДокумент124 страницыExercices Corriges Mecanique Du Point PDFPythagore De Samos100% (2)
- Devoir Sq8 StatiqueДокумент8 страницDevoir Sq8 StatiqueRuben100% (1)
- 5-REUSSITES Maths Au CE1Документ17 страниц5-REUSSITES Maths Au CE1Chris et Claire HENRIET50% (2)
- Concours PrepaVogt Mathematiques Serie C Mai 2016Документ3 страницыConcours PrepaVogt Mathematiques Serie C Mai 2016Pitchou Ryan100% (1)
- TD N°3 Cinématique Du Contact PonctuelДокумент4 страницыTD N°3 Cinématique Du Contact PonctuelAmine RbzОценок пока нет
- 32 Loi Entrée Sortie Géométrique D 1Документ6 страниц32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- TD 1Документ2 страницыTD 1hello 128Оценок пока нет
- TD 17 Corrigé - Liaisons ÉquivalentesДокумент6 страницTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Statique Graphique Quatre Forces Et Plus Cours ProfДокумент5 страницStatique Graphique Quatre Forces Et Plus Cours Profjsp100% (1)
- Transformtion 2021Документ4 страницыTransformtion 2021Zair HafnaouiОценок пока нет
- DS4 SujetДокумент8 страницDS4 SujetPierre BeckОценок пока нет
- Chap2 LIAISONS MECANIQUESДокумент13 страницChap2 LIAISONS MECANIQUESAdams SamassiОценок пока нет
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurДокумент2 страницыCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienОценок пока нет
- Correction Chapes Applications Dessin+de+definition Coupesimple 2012 2AS NetДокумент3 страницыCorrection Chapes Applications Dessin+de+definition Coupesimple 2012 2AS Netchaouch.najehОценок пока нет
- 1 TD Sollicitations - Composees SUJETДокумент2 страницы1 TD Sollicitations - Composees SUJETsaraОценок пока нет
- 2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageДокумент4 страницы2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageAdam BensaidОценок пока нет
- SERIE TD2 - Cinematique - 2020 2021Документ10 страницSERIE TD2 - Cinematique - 2020 2021Nowe AhmadeОценок пока нет
- Dynamique SiДокумент10 страницDynamique Siamo norОценок пока нет
- Cours Composition de Mouvement de Vitesse LvesДокумент5 страницCours Composition de Mouvement de Vitesse LvesziedttОценок пока нет
- Chapitre 2 TorseursДокумент13 страницChapitre 2 TorseursHediFatnassiОценок пока нет
- TD Vis EcrouДокумент3 страницыTD Vis EcrouHoussam Had100% (1)
- CATIA V5 DocumentДокумент6 страницCATIA V5 DocumentChokri AtefОценок пока нет
- Cours Transformation de MouvementДокумент10 страницCours Transformation de MouvementAsma MoussaОценок пока нет
- Tableau Des Liaisons ComplétéДокумент1 страницаTableau Des Liaisons ComplétéAntoine DauberciesОценок пока нет
- (RDM) (CO) Resistance Des Materiaux PDFДокумент30 страниц(RDM) (CO) Resistance Des Materiaux PDFZoro LeadОценок пока нет
- Sujet Mai-2018 - Poste de Perçage Automatique PDFДокумент19 страницSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaОценок пока нет
- Mecanisme de Transformation de Mouvement Bielle ManivelleДокумент3 страницыMecanisme de Transformation de Mouvement Bielle Manivellesahl silverОценок пока нет
- Tableau Des Shemas MecaniquesДокумент1 страницаTableau Des Shemas MecaniquesntabОценок пока нет
- Exercice Projection Orthogonale Partie 3Документ5 страницExercice Projection Orthogonale Partie 3Youssef YouriОценок пока нет
- DP Elec 13 - 14Документ4 страницыDP Elec 13 - 14Elafif HamdiОценок пока нет
- Normale Corigé 2012 PDFДокумент8 страницNormale Corigé 2012 PDFGuiliassОценок пока нет
- Autodesk AutoCAD 2021Документ89 страницAutodesk AutoCAD 2021bennane cidОценок пока нет
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Документ8 страницCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniОценок пока нет
- 4 - Montage Des Roulements Et Des CoussinetsДокумент10 страниц4 - Montage Des Roulements Et Des CoussinetsISMAILОценок пока нет
- EngrenageДокумент18 страницEngrenageMohamed El HajjamОценок пока нет
- Chap2 Leçon2 3&4Документ52 страницыChap2 Leçon2 3&4Guiliass100% (2)
- TD Liaisons - Schema Cinematique Corrige - 2Документ6 страницTD Liaisons - Schema Cinematique Corrige - 2Ali OuahmadОценок пока нет
- AssemblagesДокумент37 страницAssemblagesmom bakkouchОценок пока нет
- Exo 8 Batteur A HouleДокумент4 страницыExo 8 Batteur A HouleDABAKH LDEEBOYОценок пока нет
- CNC Si MP 2009 CG PDFДокумент14 страницCNC Si MP 2009 CG PDFJassir AmgroudОценок пока нет
- td3 Ci1 Capteur CorДокумент4 страницыtd3 Ci1 Capteur CorbecemОценок пока нет
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFДокумент2 страницыExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
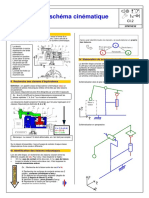
- 1-Le Schéma Cinématique Des MécanismesДокумент8 страниц1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyОценок пока нет
- Chap3 Cinematique Du Solide OkДокумент16 страницChap3 Cinematique Du Solide OkmatozoОценок пока нет
- Grue Portuaire - CorrectionДокумент13 страницGrue Portuaire - CorrectionKOUADIO PATRICEОценок пока нет
- Mac Application Torseur 2Документ1 страницаMac Application Torseur 2Bilel LaamiriОценок пока нет
- Mouvements Plans-Exercices-ÉlèveДокумент5 страницMouvements Plans-Exercices-ÉlèveYoussef DahaniОценок пока нет
- Corrigé TD 10 - Comportement Cinématique Des SystèmesДокумент5 страницCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelОценок пока нет
- 8c64r Projection PDFДокумент21 страница8c64r Projection PDFkhalid3mendounОценок пока нет
- 3 1 4 Schema CinematiqueДокумент1 страница3 1 4 Schema Cinematiquehitachi hadiОценок пока нет
- Exercice Cotation Fonctionnelle PDFДокумент5 страницExercice Cotation Fonctionnelle PDFNarjiss ShimiОценок пока нет
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseДокумент10 страницTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelОценок пока нет
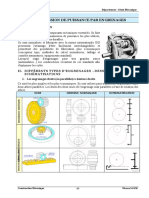
- Chap-3 Transmission de Puissance Par EngrenagesДокумент14 страницChap-3 Transmission de Puissance Par EngrenagesChokri AtefОценок пока нет
- Cine Graph EleveДокумент8 страницCine Graph EleveMohammed DahbiОценок пока нет
- 00 Résumé TransmettreДокумент2 страницы00 Résumé TransmettreSamir Bouhiyadi SamirОценок пока нет
- Sujet 4Документ5 страницSujet 4elie chaneОценок пока нет
- DM RDM Bras Telescopique - Cor - v2Документ3 страницыDM RDM Bras Telescopique - Cor - v2Mohamed El HajjamОценок пока нет
- 3-Schématisaton Et Analyse Cinématique PDFДокумент15 страниц3-Schématisaton Et Analyse Cinématique PDFhamzaОценок пока нет
- Cours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFДокумент9 страницCours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFYounes YounssОценок пока нет
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОт EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОценок пока нет
- Test Brouillard SalinДокумент2 страницыTest Brouillard SalinnooneoveroneОценок пока нет
- AbaqueДокумент1 страницаAbaquenooneoveroneОценок пока нет
- Cetim - Fiches Données Pratiques en Soudage.1-122 PDFДокумент122 страницыCetim - Fiches Données Pratiques en Soudage.1-122 PDFnooneoveroneОценок пока нет
- Technologie Plasma - PpsДокумент29 страницTechnologie Plasma - PpsnooneoveroneОценок пока нет
- Dilatation Et Retrait en SoudageДокумент9 страницDilatation Et Retrait en SoudagenooneoveroneОценок пока нет
- EP - Etude Biblio Sur L'arrachement LamellaireДокумент136 страницEP - Etude Biblio Sur L'arrachement LamellairenooneoveroneОценок пока нет
- POLY LA3T2 Mecanique MateriauxДокумент165 страницPOLY LA3T2 Mecanique MateriauxmicipsaОценок пока нет
- Synthèse Du Gaz PropaneДокумент12 страницSynthèse Du Gaz PropanenooneoveroneОценок пока нет
- Reciproque ThalesДокумент1 страницаReciproque ThalesChk YahyaОценок пока нет
- Cours Statique Dans L'espace PDFДокумент5 страницCours Statique Dans L'espace PDFAbdesslam GuennouniОценок пока нет
- Examen National Maths Sciences Et Technologies 2022 Normale CorrigeДокумент3 страницыExamen National Maths Sciences Et Technologies 2022 Normale Corrigesoufian AgОценок пока нет
- Chapitre 03 CheminementДокумент13 страницChapitre 03 CheminementEmmaОценок пока нет
- Cpgep-C11 2Документ17 страницCpgep-C11 2wekzavОценок пока нет
- Distance Point DroiteДокумент2 страницыDistance Point DroiteTommyOrtegaОценок пока нет
- Diapo 6Документ61 страницаDiapo 6mohamedОценок пока нет
- Cinématique GraphiqueДокумент4 страницыCinématique GraphiqueDABAKH LDEEBOYОценок пока нет
- Projet de Topographie 2009Документ19 страницProjet de Topographie 2009Hanane BenGamraОценок пока нет
- Chapitre 05 Profil en Long: V-1-DefinitionДокумент8 страницChapitre 05 Profil en Long: V-1-DefinitionAmin MinouОценок пока нет
- 03 Deplacement Parallele Symboles de ChristoffelДокумент23 страницы03 Deplacement Parallele Symboles de ChristoffelBrenton MorrisonОценок пока нет
- Cours G3Документ3 страницыCours G3Mamadou ThioyeОценок пока нет
- 03 - Fibre Neutre Prof - CopieДокумент4 страницы03 - Fibre Neutre Prof - CopieWael TriguiОценок пока нет
- Activité N°3Документ3 страницыActivité N°3SidiОценок пока нет
- E84p102 CoorДокумент4 страницыE84p102 Coorm0lcKy best playerОценок пока нет
- Maths Term Complexes ExДокумент4 страницыMaths Term Complexes Exapi-203629011100% (1)
- Cours Et Exos GeometrieДокумент56 страницCours Et Exos GeometrieHamza IguiОценок пока нет
- Moment CinétiqueДокумент14 страницMoment CinétiqueAlphaОценок пока нет
- 4M Serie1 - Parabole 2020 CorДокумент4 страницы4M Serie1 - Parabole 2020 CorBelgasem AsselОценок пока нет
- 9ème AFДокумент78 страниц9ème AFPlateforme Santé Haïtienne100% (3)
- Mesure D'une Localisation D'un Ensemble de Trous 1) Exemple de CotationДокумент2 страницыMesure D'une Localisation D'un Ensemble de Trous 1) Exemple de CotationFateh MakhloufiОценок пока нет
- td1 Topo 2014Документ2 страницыtd1 Topo 2014Aziz AzizОценок пока нет
- 02a Perimetres2partie PDFДокумент9 страниц02a Perimetres2partie PDFLounes OuaichaОценок пока нет
- Le Problème de DirichletДокумент28 страницLe Problème de DirichletOmar OmarioОценок пока нет
- Cinematique Du Point MaterielДокумент9 страницCinematique Du Point MaterielEmin MohamedОценок пока нет
- Révision 1Документ2 страницыRévision 1Lotfi Ben Malek0% (1)