Вам также может понравиться
- DQ542MA English Manual PDFДокумент6 страницDQ542MA English Manual PDFSteven MillerОценок пока нет
- DQ542MAДокумент5 страницDQ542MADima RedkinОценок пока нет
- Dq860ma PDFДокумент7 страницDq860ma PDFTrentoОценок пока нет
- Dq420ma English PDFДокумент6 страницDq420ma English PDFAnderson RovaniОценок пока нет
- Changzhou Wantai Electrical Appliance Co.,LtdДокумент10 страницChangzhou Wantai Electrical Appliance Co.,LtdRaul Giraldo AyalaОценок пока нет
- Stepper Motor Driver Dm860aДокумент6 страницStepper Motor Driver Dm860achomikОценок пока нет
- 中文 English Deutsch Pусский язык: Home Page About us Products News Services Contact usДокумент15 страниц中文 English Deutsch Pусский язык: Home Page About us Products News Services Contact usHOLDORFОценок пока нет
- DQ860MA EnglishДокумент16 страницDQ860MA Englishnicolascarlao notareОценок пока нет
- TB6600 User GuideДокумент11 страницTB6600 User GuideRudyardo MartinezОценок пока нет
- Digital Stepper Drive CW250: DescriptionsДокумент7 страницDigital Stepper Drive CW250: DescriptionsDavid MartinezОценок пока нет
- TB6600 Stepper Motor Driver BM3D v1.1Документ8 страницTB6600 Stepper Motor Driver BM3D v1.1cristian_floric5702Оценок пока нет
- M542 Stepper Motor DriveДокумент8 страницM542 Stepper Motor DriveElvio JungesОценок пока нет
- Dm542 ManualДокумент5 страницDm542 ManualJulio RuizОценок пока нет
- Makeblock 2H Microstep DriverДокумент4 страницыMakeblock 2H Microstep DriverMakeblockОценок пока нет
- TB6500 ManualДокумент11 страницTB6500 ManualEnrique BautistaОценок пока нет
- TB6600 User Guide V1.2Документ11 страницTB6600 User Guide V1.2Anonymous gdJiDHОценок пока нет
- Stepper Motor Driver CW230: DescriptionsДокумент7 страницStepper Motor Driver CW230: DescriptionsBill DonayreОценок пока нет
- TB6600 User Guide V1.2Документ11 страницTB6600 User Guide V1.2apic20Оценок пока нет
- SD 32208 enДокумент6 страницSD 32208 enJoão Soares0% (2)
- SD-2H086MB User ManualДокумент10 страницSD-2H086MB User ManualJohn MiltonОценок пока нет
- Stepper Motor Driver SpecificationДокумент5 страницStepper Motor Driver SpecificationMimo AbduОценок пока нет
- RMCS1104 MicroStepperDriverДокумент11 страницRMCS1104 MicroStepperDriverPranav ParikhОценок пока нет
- KA KR Motor Driver ManualДокумент33 страницыKA KR Motor Driver Manualalexandr.vl.smk2Оценок пока нет
- 1545-2phase Stepper Motor DriverДокумент3 страницы1545-2phase Stepper Motor DriverWalid YahiaouiОценок пока нет
- Rhino Motion Controls: RMCS-1102 Micro-Stepping Motor Driver (Max. 50Vdc and 5A Per Phase)Документ11 страницRhino Motion Controls: RMCS-1102 Micro-Stepping Motor Driver (Max. 50Vdc and 5A Per Phase)Adarsh Singh PariharОценок пока нет
- SEA2M68 Stepper Motor Driver - Shenzhen Instar Electromechanical Technology Development Co., LTDДокумент6 страницSEA2M68 Stepper Motor Driver - Shenzhen Instar Electromechanical Technology Development Co., LTDKunal SupekarОценок пока нет
- 1-Axis CNC Motor DriverДокумент11 страниц1-Axis CNC Motor DriverMarlon PerinОценок пока нет
- 1-Axis CNC Motor DriverДокумент11 страниц1-Axis CNC Motor DriverMarlon PerinОценок пока нет
- TB6600 User Guide V1 2 PDFДокумент11 страницTB6600 User Guide V1 2 PDFHorvath StefanОценок пока нет
- Edrive Ma860Документ7 страницEdrive Ma860marcyel Oliveira WoliveiraОценок пока нет
- Datasheet - M542H Stepper Motor DriverДокумент10 страницDatasheet - M542H Stepper Motor DriversthollanderОценок пока нет
- Driver Motore Passo PassoДокумент12 страницDriver Motore Passo Passogionp1Оценок пока нет
- Stepper Motor Driver SpecificationДокумент3 страницыStepper Motor Driver SpecificationAshrafОценок пока нет
- DM480AIДокумент3 страницыDM480AIAandk NovaОценок пока нет
- MD2278 DДокумент3 страницыMD2278 Dhoangmanh1989Оценок пока нет
- 2DM860-English Manual PDFДокумент5 страниц2DM860-English Manual PDFdiegomilitojОценок пока нет
- Stepper Motor 23HS45 For GrinderДокумент5 страницStepper Motor 23HS45 For GrindercendrezОценок пока нет
- TB6600 UpgradeДокумент3 страницыTB6600 UpgradeGiuliano Alves SantanaОценок пока нет
- Deep Sea Electronics PLC: 701 Key Start Module Operating InstructionsДокумент11 страницDeep Sea Electronics PLC: 701 Key Start Module Operating InstructionsosanebiОценок пока нет
- Servo Stepper Driver UK 2 HSS86Документ7 страницServo Stepper Driver UK 2 HSS86Mimo AbduОценок пока нет
- Novusun Controller Wiring and MACH3 Software SetupДокумент17 страницNovusun Controller Wiring and MACH3 Software Setupcristian_floric570250% (2)
- BLD100A Brushless DC Motor Controller ManualДокумент7 страницBLD100A Brushless DC Motor Controller ManualMuhammadAtirSharifОценок пока нет
- 701 Key Start Module Operating Instructions: Author:-John RuddockДокумент11 страниц701 Key Start Module Operating Instructions: Author:-John RuddockAmir MohammedОценок пока нет
- Operating Manual of Drive PDFДокумент86 страницOperating Manual of Drive PDFeletropaulomococaОценок пока нет
- Stepper Motor Driver DQ542MA DocumentДокумент4 страницыStepper Motor Driver DQ542MA DocumentRenieОценок пока нет
- Stepper Motor Driver DQ542MA Document PDFДокумент4 страницыStepper Motor Driver DQ542MA Document PDFRenieОценок пока нет
- 12-Tapgggered Roller BearingsДокумент20 страниц12-Tapgggered Roller BearingsRafik Mohamed AlhajiОценок пока нет
- HSS60Документ6 страницHSS60Abraham GutierrezОценок пока нет
- M542Документ3 страницыM542xhaneriОценок пока нет
- Microstep-Driver R60Документ12 страницMicrostep-Driver R60Yudes LiyanageОценок пока нет
- Instruction Manual PDFДокумент10 страницInstruction Manual PDFАнгел МиладиновОценок пока нет
- Instruction Manual: 230 SeriesДокумент16 страницInstruction Manual: 230 Seriesalex lzgОценок пока нет
- Driver M542m para NEMA 23Документ8 страницDriver M542m para NEMA 23Alexander Pulido MarínОценок пока нет
- G540 REV8 ManualДокумент10 страницG540 REV8 ManualJoseph Michael MirasoleОценок пока нет
- 2HSS86HДокумент6 страниц2HSS86HRafik Mohamed Alhaji100% (1)
- BLDC 5015aДокумент5 страницBLDC 5015aroozbehxoxОценок пока нет
- VDB3722MA Driver With Microstep Série NovaДокумент16 страницVDB3722MA Driver With Microstep Série NovaJefferson Alcantara GomesОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- DB en Quint4 Ps 1ac 110dc 4 109530 en 00Документ48 страницDB en Quint4 Ps 1ac 110dc 4 109530 en 00Asad NaeemОценок пока нет
- 250 WATT Power Inverter: Power Small Appliances From Your Car or Any Other 12-Volt Source With Our 250-Watt InverterДокумент3 страницы250 WATT Power Inverter: Power Small Appliances From Your Car or Any Other 12-Volt Source With Our 250-Watt Invertertaner56Оценок пока нет
- OzoneДокумент1 страницаOzonebolsjhevikОценок пока нет
- SMK0765FJ: Switching Regulator ApplicationsДокумент8 страницSMK0765FJ: Switching Regulator ApplicationsranaateeqОценок пока нет
- Differential Gear MechanismДокумент32 страницыDifferential Gear MechanismMohammad Amir100% (2)
- Ponchon Savarit MethodДокумент34 страницыPonchon Savarit Methodppga410100% (7)
- Electrical CircuitsДокумент53 страницыElectrical Circuitssuganyav6Оценок пока нет
- AKTU SyllabusДокумент19 страницAKTU SyllabusGautam NarulaОценок пока нет
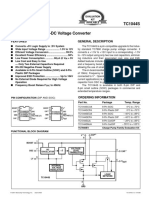
- TC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionДокумент11 страницTC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionAlex Lorz BalboaОценок пока нет
- 36-Single Phase Specialty MotorsДокумент6 страниц36-Single Phase Specialty MotorskfaliОценок пока нет
- Design and Simulation of A Sine Wave Inverter With PID Control For Nonlinear Load ApplicationsДокумент12 страницDesign and Simulation of A Sine Wave Inverter With PID Control For Nonlinear Load ApplicationsReno ReoОценок пока нет
- ProMax 3 BrochureДокумент20 страницProMax 3 BrochureNila Gama100% (2)
- Saudi Arabian Oil Company: NotesДокумент1 страницаSaudi Arabian Oil Company: Noteshany mohamedОценок пока нет
- AHU Instalation Manual YorkДокумент36 страницAHU Instalation Manual YorkBangto Yibsip50% (2)
- 10 - DME 415-435 Vol 2 Ing Sect 09 TKW Thales March 03Документ26 страниц10 - DME 415-435 Vol 2 Ing Sect 09 TKW Thales March 03Vagner AndréОценок пока нет
- The Thermodynamic Properties of Platinum: by J. W. ArblasterДокумент9 страницThe Thermodynamic Properties of Platinum: by J. W. ArblasterEmmanuel PlazaОценок пока нет
- TransmutationДокумент7 страницTransmutationIvan Dwi SandraОценок пока нет
- Project On Global WarmingДокумент22 страницыProject On Global WarmingHilda DsouzaОценок пока нет
- Voltage DropДокумент18 страницVoltage DropVaughn GaneloОценок пока нет
- RAC Lecture 10 PDFДокумент18 страницRAC Lecture 10 PDFSalman KhanОценок пока нет
- Aktuator Diapraghm Fisher 30i-70iДокумент12 страницAktuator Diapraghm Fisher 30i-70iUntoro Adi NugrohoОценок пока нет
- Ca NLH 033 PDFДокумент179 страницCa NLH 033 PDFIsaac David Viloria PizarroОценок пока нет
- 100% NATEF Task Coverage: Automotive TechnologyДокумент88 страниц100% NATEF Task Coverage: Automotive TechnologynhathoaОценок пока нет
- Pages From Chapter 17-11Документ10 страницPages From Chapter 17-11taОценок пока нет
- ECM433 LAB 1 (Reference Update)Документ10 страницECM433 LAB 1 (Reference Update)Nina WalinОценок пока нет
- Buhler Rice Processing Catalogue Global 2015 PDFДокумент32 страницыBuhler Rice Processing Catalogue Global 2015 PDFdoniОценок пока нет
- 22661-Sample-Question-Paper (Msbte Study Resources) PDFДокумент4 страницы22661-Sample-Question-Paper (Msbte Study Resources) PDFAmit Ghade100% (2)
- Cat 307D Main Pump OperationДокумент3 страницыCat 307D Main Pump Operationkahandawala100% (1)
- PWM Control IC: BM1P107FJДокумент30 страницPWM Control IC: BM1P107FJArokiaraj RajОценок пока нет
- Module 1 Capital and Cost EstimationДокумент39 страницModule 1 Capital and Cost EstimationYozora夜空Оценок пока нет