Вам также может понравиться
- BootP LiteДокумент6 страницBootP LiteOctavio AguirreОценок пока нет
- A2 Installation Manual PDFДокумент27 страницA2 Installation Manual PDFEko SuwarsonoОценок пока нет
- CS8656 E S 2015 03 A Non IsoДокумент10 страницCS8656 E S 2015 03 A Non IsoAnonymous cQAi2l7Оценок пока нет
- REFUcontrol Manual V1.0 enДокумент12 страницREFUcontrol Manual V1.0 enMr. S Sivakumar EEEОценок пока нет
- Wago I/oДокумент19 страницWago I/oLINZO75Оценок пока нет
- JX-300XP HardwareДокумент39 страницJX-300XP HardwareMesafint KassieОценок пока нет
- SDC15 Installation & ConfigurationДокумент236 страницSDC15 Installation & ConfigurationRegan YanОценок пока нет
- Programmable Signal Isolator: Universal Input, 5 Outputs, Integral LCD DisplayДокумент7 страницProgrammable Signal Isolator: Universal Input, 5 Outputs, Integral LCD DisplayKalaivani MurugesanОценок пока нет
- Simulation Analog Input and Output Programming in Simatic S7-PLCSimДокумент13 страницSimulation Analog Input and Output Programming in Simatic S7-PLCSimKhaled OuniОценок пока нет
- VLT Automation Drive FC 360 PDFДокумент16 страницVLT Automation Drive FC 360 PDFMinh NguyễnОценок пока нет
- CCTV DVR Connection DiagramДокумент1 страницаCCTV DVR Connection DiagramMark Jan Fabiosa TubaonОценок пока нет
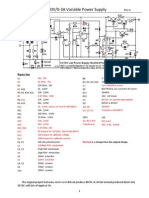
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Документ2 страницыModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraОценок пока нет
- Bpro Service Manual English PDFДокумент37 страницBpro Service Manual English PDFPaulo CésarОценок пока нет
- SP PABX Manual 2013Документ14 страницSP PABX Manual 2013Bayu PinasthikaОценок пока нет
- Falcoweb User Manual 250113Документ67 страницFalcoweb User Manual 250113HendriJuniantoОценок пока нет
- LNL X2220 DatasheetДокумент2 страницыLNL X2220 DatasheetDewytt Jhordan Cordoba CubillosОценок пока нет
- TwinCAT2 - EtherCATConnection GuideДокумент33 страницыTwinCAT2 - EtherCATConnection GuideJorge_Andril_5370Оценок пока нет
- Manual Maya-625A S - Series PDFДокумент25 страницManual Maya-625A S - Series PDFHữu Dũng NguyễnОценок пока нет
- 1SAP130300R0271 Pm573 Ethac500 Prog Logic Contr 512kbДокумент3 страницы1SAP130300R0271 Pm573 Ethac500 Prog Logic Contr 512kbErick Romucho SánchezОценок пока нет
- Delta Ia-Plc DVP-20PM PM en 20140212Документ580 страницDelta Ia-Plc DVP-20PM PM en 20140212Nguyen Quang DoanОценок пока нет
- Rudolf RTXДокумент15 страницRudolf RTXNuengruthai WeerawattanaОценок пока нет
- Micronta 22-204aДокумент8 страницMicronta 22-204aMichel GauvinОценок пока нет
- RT4F 110V W1704a PDFДокумент6 страницRT4F 110V W1704a PDFOmar Orlando Rincon FigueroaОценок пока нет
- RASS-S User Manual v6.2Документ30 страницRASS-S User Manual v6.2dk3he1100% (1)
- Taktis Multi Protocol FCAP MAN 1431KE MДокумент187 страницTaktis Multi Protocol FCAP MAN 1431KE MYoyon HaryonoОценок пока нет
- Common Okidata Printer Error Codes PDFДокумент3 страницыCommon Okidata Printer Error Codes PDFstevanreljicОценок пока нет
- Invertec V160S & V160 TP PDFДокумент60 страницInvertec V160S & V160 TP PDFIron MaskОценок пока нет
- ABB - ACS850 DriveStudio PDFДокумент2 страницыABB - ACS850 DriveStudio PDFavijit dasОценок пока нет
- Elnet CommДокумент81 страницаElnet CommTomas Fazzio100% (1)
- E2000-Q enДокумент141 страницаE2000-Q enArvin JosueОценок пока нет
- Manual KMBE Kilomux 2100-2104Документ104 страницыManual KMBE Kilomux 2100-2104Alejandro Vera SolisОценок пока нет
- Micro-Cap 12: Electronic Circuit Analysis Program Reference ManualДокумент142 страницыMicro-Cap 12: Electronic Circuit Analysis Program Reference ManualMartin Estrada SotoОценок пока нет
- GF 9900 ManualДокумент64 страницыGF 9900 ManualCarlos FarbiarzОценок пока нет
- Power PMAC Users ManualДокумент862 страницыPower PMAC Users Manualvictorzacherhotmail.comОценок пока нет
- AE-100 Coal Flow Monitor Operation ManualДокумент4 страницыAE-100 Coal Flow Monitor Operation ManualNhật TuấnОценок пока нет
- CEMB DWA1000XL Wheel Alignment ManualДокумент65 страницCEMB DWA1000XL Wheel Alignment ManualMáximo MéndezОценок пока нет
- Torniquete WJTS122 PDFДокумент11 страницTorniquete WJTS122 PDFpraga29Оценок пока нет
- Galaxy 3000 NewДокумент4 страницыGalaxy 3000 NewWaleed Mohammed FekryОценок пока нет
- Vacon NXP Line Sync APFIF131 Application Manual UDДокумент130 страницVacon NXP Line Sync APFIF131 Application Manual UDTanuTiganuОценок пока нет
- TV Sony Kv-pg14l70Документ43 страницыTV Sony Kv-pg14l70Emilio Pinato100% (3)
- Additive Injection System: Equalis AIMДокумент2 страницыAdditive Injection System: Equalis AIMJose HuescaОценок пока нет
- Easergy Builder en Rev1.3 104Документ114 страницEasergy Builder en Rev1.3 104alex pardoОценок пока нет
- SoMove 2.x Installation NotesДокумент8 страницSoMove 2.x Installation NotesPaulJohnPosadasGimenaОценок пока нет
- AVR Project - Remote Controlled Fan Regulator.Документ23 страницыAVR Project - Remote Controlled Fan Regulator.nadaratОценок пока нет
- Rfid Based Security System: A Project ReportДокумент22 страницыRfid Based Security System: A Project ReportHeartin HariОценок пока нет
- MK 201 AДокумент4 страницыMK 201 AAli AhmadОценок пока нет
- Aliahart: Operation ManualДокумент7 страницAliahart: Operation ManualRexCrazyMindОценок пока нет
- Shuttle Impact Dot Matrix Epson M-180 M-190 USMP-PN10-20SERIESДокумент47 страницShuttle Impact Dot Matrix Epson M-180 M-190 USMP-PN10-20SERIESNicolaiFusdahlОценок пока нет
- Batch-4 (B) - IR2110 Based Square Wave Inverter Using 555 TimerДокумент37 страницBatch-4 (B) - IR2110 Based Square Wave Inverter Using 555 TimerКети ТаневскаОценок пока нет
- CP1W-EIP61 SetupGuide Manual en 201111 PDFДокумент21 страницаCP1W-EIP61 SetupGuide Manual en 201111 PDFfaspОценок пока нет
- FC-102 Programming GuideДокумент231 страницаFC-102 Programming GuidedoomtoastОценок пока нет
- ADAM 4541 42 Manual PDFДокумент4 страницыADAM 4541 42 Manual PDFDaniel RolonОценок пока нет
- PA3000 en Arch 1011122Документ78 страницPA3000 en Arch 1011122lifgarygarcia100% (1)
- Digital Arc Voltage Height Controller Operation Manual (V1.9)Документ64 страницыDigital Arc Voltage Height Controller Operation Manual (V1.9)PandegaОценок пока нет
- Whirlpool Magicool Inverter AC 2019 Model Error Code-1Документ3 страницыWhirlpool Magicool Inverter AC 2019 Model Error Code-1INSTA SERVICEОценок пока нет
- Intro To MiRModbusTCPДокумент9 страницIntro To MiRModbusTCPOliver Ochoa GarciaОценок пока нет
- 601 Modbusprot 1MDU072231-YN ENaДокумент92 страницы601 Modbusprot 1MDU072231-YN ENaalex pardoОценок пока нет
- BA - KOSTAL Interface Description MODBUS - PIKO CIДокумент38 страницBA - KOSTAL Interface Description MODBUS - PIKO CIJuan Carlos Martinez ChavesОценок пока нет
- NMTC Manual v22Документ32 страницыNMTC Manual v22Marius Liviu NegrescuОценок пока нет
- QSG0007-UR20-Modbus Understanding Coils and RegisterДокумент20 страницQSG0007-UR20-Modbus Understanding Coils and RegisterUiliansОценок пока нет
- Examen para Sophos AngelДокумент19 страницExamen para Sophos AngelCarlos AynaguanoОценок пока нет
- Cisco Catalyst 9800 Series Wireless Controller Software Configuration Guide, Cisco IOS XE Bengaluru 17.6.xДокумент2 136 страницCisco Catalyst 9800 Series Wireless Controller Software Configuration Guide, Cisco IOS XE Bengaluru 17.6.xshola ogundipeОценок пока нет
- Sit325-2 1PДокумент2 страницыSit325-2 1PKanishka PereraОценок пока нет
- Toshiba Field Server Driver ProtocolДокумент3 страницыToshiba Field Server Driver ProtocolSteven MarksОценок пока нет
- ML600 User Manual 6-APR-09 PDFДокумент559 страницML600 User Manual 6-APR-09 PDFJordi KlerigaОценок пока нет
- Comp3632 ProtocolsДокумент41 страницаComp3632 ProtocolsKavya BalajiОценок пока нет
- Sdwan Practice Lab 1 v1.1Документ261 страницаSdwan Practice Lab 1 v1.1Lam Van BuiОценок пока нет
- Jamming and Network Restoration On Multi Channel Wireless Sensor NetworksДокумент5 страницJamming and Network Restoration On Multi Channel Wireless Sensor NetworksRakeshconclaveОценок пока нет
- MBB V600R005C00 ATN+CX IDEAL (Seamless MPLS) Solution Configuration Guide (CLI) 03-CДокумент371 страницаMBB V600R005C00 ATN+CX IDEAL (Seamless MPLS) Solution Configuration Guide (CLI) 03-CNosaErnestОценок пока нет
- Mikrotik + Squid (Perfect)Документ3 страницыMikrotik + Squid (Perfect)Arnanda Fauzan HelmyОценок пока нет
- Integrated Services Digital Network (ISDN)Документ26 страницIntegrated Services Digital Network (ISDN)rehananaanaОценок пока нет
- Dvpen01-Sl: Operation ManualДокумент58 страницDvpen01-Sl: Operation ManualSait DinçОценок пока нет
- Pan OsДокумент1 168 страницPan Oslarry linaresОценок пока нет
- Practical SIEM Tools For SCADA EnvironmentДокумент27 страницPractical SIEM Tools For SCADA EnvironmentJust Another YoutuberОценок пока нет
- How To Configure An Ikev2 Ipsec Site-To-Site VPN To A Routed-Based Microsoft Azure VPN GatewayДокумент6 страницHow To Configure An Ikev2 Ipsec Site-To-Site VPN To A Routed-Based Microsoft Azure VPN GatewaycursoОценок пока нет
- Data Sheet Surpass Hit 7035Документ2 страницыData Sheet Surpass Hit 7035Mosab A. Bashir100% (1)
- Routing Protocols and Concepts CCNA Exploration Companion Guide 1st EditionДокумент3 страницыRouting Protocols and Concepts CCNA Exploration Companion Guide 1st EditionWlladimir ChavarriaОценок пока нет
- IR21 ARGTP Telecom Argentina S.A. 20200805220358Документ133 страницыIR21 ARGTP Telecom Argentina S.A. 20200805220358Edgar CotaОценок пока нет
- Networker Interview: ACL Interview Questions and AnswersДокумент2 страницыNetworker Interview: ACL Interview Questions and AnswersNarendra PattanayakОценок пока нет
- Password Recovery For GPON ZTE ZXA10 F660Документ13 страницPassword Recovery For GPON ZTE ZXA10 F660zamoenОценок пока нет
- LTE Radio Interface ProceduresДокумент116 страницLTE Radio Interface ProceduresMuhammad Ali KhalidОценок пока нет
- ListДокумент3 страницыListZeyad AlabsyОценок пока нет
- ZTE H1600 Home Gateway User ManualДокумент15 страницZTE H1600 Home Gateway User ManualandreasmonОценок пока нет
- IkegamiДокумент2 страницыIkegamiRaul Balderrama DОценок пока нет
- Performance Analysis of LoRa Radio For An Indoor IoT ApplicationsДокумент7 страницPerformance Analysis of LoRa Radio For An Indoor IoT ApplicationsAndreea IonescuОценок пока нет
- CN Lab ManualДокумент34 страницыCN Lab ManualChaya Bsvrj75% (4)
- Anuradha Pathak Update ResumeДокумент2 страницыAnuradha Pathak Update Resumerahul bansalОценок пока нет
- Basics of Profibus Profibus in Practice v111Документ44 страницыBasics of Profibus Profibus in Practice v111chandakberaОценок пока нет
- A10 Upgrade CliДокумент3 страницыA10 Upgrade CliVăn HảiОценок пока нет
- How To Configure Active Directory (AD) Single Sign On (SSO) in Transparent ModeДокумент9 страницHow To Configure Active Directory (AD) Single Sign On (SSO) in Transparent Modejcr0ch4Оценок пока нет