Вам также может понравиться
- TP GLPKДокумент19 страницTP GLPKlyna boularasОценок пока нет
- Exercices: EnsiasДокумент4 страницыExercices: EnsiasAhmed Ma100% (1)
- Mathematique de GestionДокумент37 страницMathematique de GestionRitaAlbОценок пока нет
- TD Corrigés CompДокумент50 страницTD Corrigés Compمدونة المحترفين100% (1)
- Cours Et TD Codage Et Théorie de L'informationДокумент42 страницыCours Et TD Codage Et Théorie de L'informationNinå Så100% (3)
- A14 SolutionsDevoir2Документ7 страницA14 SolutionsDevoir2Anonymous Lkp2wB4100% (1)
- TD2 PLДокумент3 страницыTD2 PLYassminaОценок пока нет
- Chapitre 1Документ46 страницChapitre 1Nad Ia100% (1)
- Technologue ISG 2004 Application Correction Part 1Документ5 страницTechnologue ISG 2004 Application Correction Part 1Mayssa RjaibiaОценок пока нет
- Mon Mon RapportДокумент48 страницMon Mon RapportNianmissou MienwaОценок пока нет
- TD de Programmation Linã©aireДокумент9 страницTD de Programmation Linã©aireFatin FatiОценок пока нет
- Programmation Lineaire PDFДокумент10 страницProgrammation Lineaire PDFnishanth abirОценок пока нет
- Cours Sur Les AutomatesДокумент166 страницCours Sur Les Automatesfred gbegbeОценок пока нет
- Problème Du Voyageur de Commerce (PVC) : Etude Théorique Du Problème & Etude ExpérimentaleДокумент22 страницыProblème Du Voyageur de Commerce (PVC) : Etude Théorique Du Problème & Etude ExpérimentalemarwaabdОценок пока нет
- Sujet 304 1358935926Документ2 страницыSujet 304 1358935926maxpain2010Оценок пока нет
- Introduction À La LogiqueДокумент35 страницIntroduction À La Logiqueamore mio0% (1)
- 06 OrdonnancementДокумент26 страниц06 OrdonnancementbouchОценок пока нет
- Théorie Des Écarts ComplémentairesДокумент9 страницThéorie Des Écarts Complémentaireskhadija100% (1)
- 4 Prog DynДокумент7 страниц4 Prog DynkhalkhoulОценок пока нет
- COMPLEXIT2Документ4 страницыCOMPLEXIT2Rekia RОценок пока нет
- Cours Recherche OpérationnelДокумент60 страницCours Recherche OpérationnelMouad GuendouzОценок пока нет
- Poo TP 03Документ1 страницаPoo TP 03sabrinaОценок пока нет
- Modele Rapport GI 10 05 2021Документ44 страницыModele Rapport GI 10 05 2021ismail boulsaneОценок пока нет
- Base de Données RHДокумент7 страницBase de Données RHSadek AbderrahmaneОценок пока нет
- Exercice TCP InternetДокумент7 страницExercice TCP InternetpipilaОценок пока нет
- Exposé Sur Iptables: Membres Du GroupeДокумент8 страницExposé Sur Iptables: Membres Du GroupeCrypto Sylvain100% (1)
- TP 2 SparqlДокумент4 страницыTP 2 SparqlYao jean lucОценок пока нет
- Deepmath - Mathématiques (Simples) Des Réseaux de Neurones (Pas Trop Compliqués) : Algorithmes Et MathématiquesДокумент283 страницыDeepmath - Mathématiques (Simples) Des Réseaux de Neurones (Pas Trop Compliqués) : Algorithmes Et MathématiquesgilouОценок пока нет
- TP N°2: Excel Solver: 1) Activer Le SolveurДокумент4 страницыTP N°2: Excel Solver: 1) Activer Le SolveurChad IrungОценок пока нет
- s3 - Loisprob - TdexcorrДокумент20 страницs3 - Loisprob - TdexcorrMikeОценок пока нет
- Ro-Chap 1Документ131 страницаRo-Chap 1Bachir NassaОценок пока нет
- TD 1 PDFДокумент3 страницыTD 1 PDFOuijdane TaieneОценок пока нет
- Support de Cours: Ervice Riented RchitectureДокумент129 страницSupport de Cours: Ervice Riented RchitectureMamadou TouréОценок пока нет
- exosPL Foad3c-2 PDFДокумент7 страницexosPL Foad3c-2 PDFSeptimus PierreОценок пока нет
- TD EC Big DataДокумент3 страницыTD EC Big DataMme et Mr LafonОценок пока нет
- Rapport de Stage - Version FinaleДокумент66 страницRapport de Stage - Version FinaleAbdellah SabbariОценок пока нет
- Globalnet Connection Manager: PrésentationДокумент36 страницGlobalnet Connection Manager: PrésentationDhia Hamrouni0% (1)
- (s2) Informatiques - Examen 2005 (Session de Rattrapage)Документ5 страниц(s2) Informatiques - Examen 2005 (Session de Rattrapage)OverDocОценок пока нет
- Correction TD1Документ5 страницCorrection TD1desmon destroyОценок пока нет
- EXPOSE Probleme Du Voyageur de CommerceДокумент17 страницEXPOSE Probleme Du Voyageur de CommerceMehdi Ait EL KadiОценок пока нет
- Présentation Du Cours PDFДокумент3 страницыPrésentation Du Cours PDFJesuyonОценок пока нет
- Cours FSR v1Документ73 страницыCours FSR v1belfathiОценок пока нет
- SimplexДокумент25 страницSimplexoualidhseОценок пока нет
- TD N°01 2019-2020Документ2 страницыTD N°01 2019-2020ANI100% (1)
- Programmation ConcurenteДокумент74 страницыProgrammation Concurenteikhou08Оценок пока нет
- TD5Документ2 страницыTD5MaximaОценок пока нет
- (M1 AD - IA) 1.1. Algo Apprentissage Perceptron MonocoucheДокумент3 страницы(M1 AD - IA) 1.1. Algo Apprentissage Perceptron MonocoucheAla Eddine BerkaniОценок пока нет
- Chiffrement de HillДокумент2 страницыChiffrement de HillshylamoОценок пока нет
- Série III - Méthode SimplexeДокумент9 страницSérie III - Méthode SimplexeEl Mahdi AhouadОценок пока нет
- La Plateforme AMINEДокумент134 страницыLa Plateforme AMINEAdil Kabbaj100% (2)
- Projet Developpement MobileДокумент2 страницыProjet Developpement MobilejeanОценок пока нет
- Sparkml 170218214151 PDFДокумент50 страницSparkml 170218214151 PDFIl Capo Dei CapeiОценок пока нет
- TD 3 CompilationДокумент2 страницыTD 3 Compilationnikan74883Оценок пока нет
- TD0 RoДокумент12 страницTD0 RoachrfОценок пока нет
- Ch2 Processus Et ThreadsДокумент32 страницыCh2 Processus Et ThreadsWawad MinyarОценок пока нет
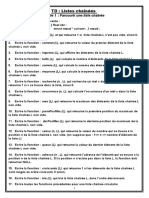
- TD91 Listes Chainées - DétailléДокумент6 страницTD91 Listes Chainées - DétaillémohamedОценок пока нет
- TP JavascriptДокумент3 страницыTP JavascriptMohamed DallagiОценок пока нет
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsОт EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsОценок пока нет
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019От EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Рейтинг: 5 из 5 звезд5/5 (1)
- TD2 Ro 11-12Документ4 страницыTD2 Ro 11-12Sarra KaissОценок пока нет
- AdmiДокумент9 страницAdmiSaleh BgfОценок пока нет
- Outils deДокумент3 страницыOutils deSaleh BgfОценок пока нет
- 1-2018-Procedure de Soutenance MasterДокумент1 страница1-2018-Procedure de Soutenance MasterSaleh BgfОценок пока нет
- Cos3° Et Sin3°Документ1 страницаCos3° Et Sin3°Saleh BgfОценок пока нет
- ProjetДокумент1 страницаProjetSaleh BgfОценок пока нет
- ModLin Série 2Документ2 страницыModLin Série 2Saleh BgfОценок пока нет
- Master Equations Aux Dérivées PartiellesДокумент4 страницыMaster Equations Aux Dérivées PartiellesSaleh BgfОценок пока нет
- Exercices Corriges Equations Differentielles LineairesДокумент16 страницExercices Corriges Equations Differentielles LineairesYûri Habib Boussâa100% (2)
- ProcДокумент4 страницыProcSaleh BgfОценок пока нет
- Programme ActuariatДокумент31 страницаProgramme ActuariatSaleh BgfОценок пока нет
- Matlab CRДокумент1 страницаMatlab CRSaleh BgfОценок пока нет
- Chaine de MarkovДокумент287 страницChaine de MarkovSaleh Bgf100% (2)
- Master Mathématiques FinancièresДокумент4 страницыMaster Mathématiques FinancièresSaleh BgfОценок пока нет
- Cours Series EntieresДокумент20 страницCours Series Entieresanass kaddouriОценок пока нет
- Generalites EconometrieДокумент28 страницGeneralites EconometrieYASSINEОценок пока нет
- Naftal PDFДокумент74 страницыNaftal PDFSaleh Bgf100% (1)
- Chaîne de Markov. File1Документ13 страницChaîne de Markov. File1Saleh BgfОценок пока нет
- ROДокумент53 страницыROmaximinОценок пока нет
- Serie3 Lic3 RO MarkovДокумент4 страницыSerie3 Lic3 RO MarkovSaleh BgfОценок пока нет
- Optimisation - Méthode Big M - Magnitude de M - Mathematics Stack ExchangeДокумент2 страницыOptimisation - Méthode Big M - Magnitude de M - Mathematics Stack ExchangeSaleh BgfОценок пока нет
- M1 Topologie TDДокумент2 страницыM1 Topologie TDSaleh BgfОценок пока нет
- FilesДокумент7 страницFilesSaleh BgfОценок пока нет
- Quand Appliquons-Nous La Méthode BIG M À La Recherche Opérationnelle - QuoraДокумент4 страницыQuand Appliquons-Nous La Méthode BIG M À La Recherche Opérationnelle - QuoraSaleh Bgf100% (2)
- Tdanalyse 4Документ2 страницыTdanalyse 4Saleh BgfОценок пока нет
- Naftal PDFДокумент74 страницыNaftal PDFSaleh Bgf100% (1)
- MIT1 264JF13 Lect 13Документ2 страницыMIT1 264JF13 Lect 13Saleh BgfОценок пока нет
- 01 Logique Corrige PDFДокумент2 страницы01 Logique Corrige PDFSaleh BgfОценок пока нет
- RapportДокумент12 страницRapportAbderrazekHmidetОценок пока нет
- Pour PFE Licence 2017Документ1 страницаPour PFE Licence 2017Saleh BgfОценок пока нет
- Algor Ford FulkersonДокумент6 страницAlgor Ford FulkersonMziou HammadiОценок пока нет
- CPREQUAM 2022 Exercices Sur ArithmétiqueДокумент20 страницCPREQUAM 2022 Exercices Sur ArithmétiqueLevier PoidsОценок пока нет
- Filière D'Ingénieurs: Systèmes Intelligents Module: Théorie de L'Information Codage Source, Canal Vidéo Et Parole Exercices de TdsДокумент6 страницFilière D'Ingénieurs: Systèmes Intelligents Module: Théorie de L'Information Codage Source, Canal Vidéo Et Parole Exercices de TdsHamza MhalОценок пока нет
- TD4 UIC Graphe 2019Документ2 страницыTD4 UIC Graphe 2019bouenaniОценок пока нет
- Chapitre 3 FlotsДокумент10 страницChapitre 3 FlotsAbdelhafidОценок пока нет
- Problèmes Avec Et Sans Problèmes!Документ175 страницProblèmes Avec Et Sans Problèmes!Florentin SmarandacheОценок пока нет
- TD 1Документ2 страницыTD 1jouini sarraОценок пока нет
- Dénombrements ProbaДокумент51 страницаDénombrements ProbaSohaib SfОценок пока нет
- Matrice D'incidence - AdjacenceДокумент4 страницыMatrice D'incidence - AdjacenceDe Sa Maman EliasОценок пока нет
- S 06 DesarДокумент12 страницS 06 DesarseriannyОценок пока нет
- Corrigepartiel 10Документ4 страницыCorrigepartiel 10Moussi BaderОценок пока нет
- Activite Dintroduction GraphesДокумент35 страницActivite Dintroduction GraphesLaméОценок пока нет
- Term Spe P2 Cours DenombrementДокумент7 страницTerm Spe P2 Cours Denombrement45zОценок пока нет
- Livre 4 MATH 2Документ21 страницаLivre 4 MATH 2moukhtardieng0Оценок пока нет
- Examen 2014-2015Документ2 страницыExamen 2014-2015titanОценок пока нет
- Graphe 1Документ5 страницGraphe 1hatemОценок пока нет
- exosPL Foad4c-1Документ6 страницexosPL Foad4c-1Septimus PierreОценок пока нет
- Correction DM2 STSДокумент2 страницыCorrection DM2 STSFifo LhajОценок пока нет
- LogarithmeДокумент2 страницыLogarithmeKâîs Bên MãbrôûkОценок пока нет
- Ds 03Документ4 страницыDs 03Wail Mansour MansouriОценок пока нет
- TD3 An 2018Документ4 страницыTD3 An 2018azzamОценок пока нет
- Coeff BinomДокумент3 страницыCoeff BinomMarouaneRimoОценок пока нет
- Arithmétique Dans Z-Exos-2SM (BIOF)Документ4 страницыArithmétique Dans Z-Exos-2SM (BIOF)Amine HamdaouiОценок пока нет
- TD1 Complexité CorrectionДокумент3 страницыTD1 Complexité CorrectionMohamed Aziz MarzoukiОценок пока нет
- 15 Groupe SymetriqueДокумент12 страниц15 Groupe SymetriqueDhm CfaОценок пока нет
- Mise en Évidence SimpleДокумент62 страницыMise en Évidence SimpleStéphane couturierОценок пока нет
- PolynomesДокумент19 страницPolynomesseptembre2016Оценок пока нет
- E3a MP 2015 Informatique EpreuveДокумент4 страницыE3a MP 2015 Informatique EpreuvedodomarocОценок пока нет