Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Surveying IIДокумент19 страницSurveying IIEr Santosh KaparОценок пока нет
- Islands Near Makassar: Click Here For ChartДокумент6 страницIslands Near Makassar: Click Here For ChartSholehuddin ZainudinОценок пока нет
- TMC DMPДокумент124 страницыTMC DMPbombonde_797469Оценок пока нет
- Cactus: Pachycereus Pringlei Blossfeldia LiliputianaДокумент3 страницыCactus: Pachycereus Pringlei Blossfeldia LiliputianamloveboyОценок пока нет
- Sarasvati River: Course of Saraswati Palaeo-DrainageДокумент9 страницSarasvati River: Course of Saraswati Palaeo-DrainageNagaraja Rao MukhiralaОценок пока нет
- White DolpinДокумент33 страницыWhite Dolpinsyed abbasОценок пока нет
- URISA News January/February 2009Документ12 страницURISA News January/February 2009URISA- The Association for GIS ProfessionalsОценок пока нет
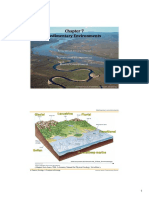
- Sedimentary EnvironmentsДокумент14 страницSedimentary EnvironmentsGelique de CastroОценок пока нет
- Weather Observing Handbook PDFДокумент153 страницыWeather Observing Handbook PDFRishabh Singh100% (1)
- Secondary Case Study Slide 1Документ3 страницыSecondary Case Study Slide 1Sarah Elizabeth BijuОценок пока нет
- 9 What Causes FloodlingДокумент16 страниц9 What Causes Floodlingapi-336814146Оценок пока нет
- Tania Joanna Dolphin Discursive Construction Hunza Pakistan Travel Writing 1889-1999Документ328 страницTania Joanna Dolphin Discursive Construction Hunza Pakistan Travel Writing 1889-1999Pear DadaОценок пока нет
- The Official Malta & Gozo Brochure in EnglishДокумент13 страницThe Official Malta & Gozo Brochure in EnglishVisitMalta100% (1)
- ADF Report On The Execution and Burial of Sergeant Leonard SiffleetДокумент77 страницADF Report On The Execution and Burial of Sergeant Leonard SiffleetMichael SmithОценок пока нет
- Daftar PustakaДокумент2 страницыDaftar PustakaDjauhari NoorОценок пока нет
- Sandakan FormationДокумент2 страницыSandakan FormationAlvini IkaОценок пока нет
- The Predynastic Period in EgyptДокумент140 страницThe Predynastic Period in EgyptSongОценок пока нет
- (Planning) - Urban DesignДокумент7 страниц(Planning) - Urban DesignKenneth BarberОценок пока нет
- Indus Waters TreatyДокумент10 страницIndus Waters Treatym.aminОценок пока нет
- Transformation of Snow To IceДокумент6 страницTransformation of Snow To IceItinderjot SinghОценок пока нет
- IHRDC E-Learning Solutions Detailed CatalogДокумент515 страницIHRDC E-Learning Solutions Detailed CatalogjjelwartОценок пока нет
- Proclaimed Watershed ReservesДокумент13 страницProclaimed Watershed ReservesMakyoy Sarmiento100% (1)
- Cuerry Philips Regan 2004 Emergency Response Systems and The Creeping Legibility of People and Places GREAT APPLICATION of SCOTT SEEING LIKE A STATEДокумент13 страницCuerry Philips Regan 2004 Emergency Response Systems and The Creeping Legibility of People and Places GREAT APPLICATION of SCOTT SEEING LIKE A STATEBoris VelinesОценок пока нет
- Fohn Wind EffectДокумент2 страницыFohn Wind EffectShashi Kumar RanaОценок пока нет
- Vehicle PositionsДокумент621 страницаVehicle PositionsDivyam GuptaОценок пока нет
- GHMC Go 288Документ33 страницыGHMC Go 288kranthi195Оценок пока нет
- Quantity Surveying & Cost Estimation CE-372 XEN Shahid HussainДокумент4 страницыQuantity Surveying & Cost Estimation CE-372 XEN Shahid HussainAli TariqОценок пока нет
- Miami Dade Sea Level Rise Tidal Flooding Fact SheetДокумент10 страницMiami Dade Sea Level Rise Tidal Flooding Fact SheetChris2889Оценок пока нет
- 1-The Origin of WindsДокумент43 страницы1-The Origin of Windsiisa8aОценок пока нет