Вам также может понравиться
- Stability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioДокумент31 страницаStability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioLenin ValerioОценок пока нет
- Neves 2006Документ31 страницаNeves 2006Janatan ChoiОценок пока нет
- Seaplane Landing Smart Control at Wave Disturbances: Vladimir Nebylov, Alexander NebylovДокумент6 страницSeaplane Landing Smart Control at Wave Disturbances: Vladimir Nebylov, Alexander NebylovKay WhiteОценок пока нет
- Lithospheric DiscontinuitiesОт EverandLithospheric DiscontinuitiesHuaiyu YuanОценок пока нет
- A Ray Theory For Nonlinear Ship Waves and Wave Resistance YimДокумент28 страницA Ray Theory For Nonlinear Ship Waves and Wave Resistance Yimricky.pigazziniОценок пока нет
- Catamaran Wave Piercing Bow 1Документ9 страницCatamaran Wave Piercing Bow 1Akbari KarimОценок пока нет
- K878 Levadou 2003 Parametric RollДокумент14 страницK878 Levadou 2003 Parametric Rollباسل ديوبОценок пока нет
- Modeling Motion and Loads On Stranded Ships in WavesДокумент11 страницModeling Motion and Loads On Stranded Ships in WavesMahdiОценок пока нет
- Investigation of MotionsДокумент17 страницInvestigation of MotionsIzi MuhОценок пока нет
- Heave Motion Estimation of A Vessel UsingДокумент6 страницHeave Motion Estimation of A Vessel UsingYuhОценок пока нет
- Oyster Wave Surge Numerical Study PDFДокумент33 страницыOyster Wave Surge Numerical Study PDFMateus Lanzi CiolaОценок пока нет
- During Mane"uversДокумент32 страницыDuring Mane"uversThibault HugОценок пока нет
- Unit 12Документ8 страницUnit 12Vikash Kumar BhartiyaОценок пока нет
- Ship ShadowДокумент10 страницShip ShadowColleen CallahanОценок пока нет
- Hull Design Considerations For Improved Stability of Fishing Vessels in WavesДокумент14 страницHull Design Considerations For Improved Stability of Fishing Vessels in WavesEd UrquizaОценок пока нет
- Mano Behaviour of Ships in Extreme Astern SeasДокумент54 страницыMano Behaviour of Ships in Extreme Astern SeaskoteshwarryahoocomОценок пока нет
- Simulation of Ship Motion in Seaway: and Mogens BlankeДокумент13 страницSimulation of Ship Motion in Seaway: and Mogens BlankeEgwuatu UchennaОценок пока нет
- Sea-Surface Observations of The Magnetic Signals of Ocean SwellsДокумент8 страницSea-Surface Observations of The Magnetic Signals of Ocean SwellsMilan StepanovОценок пока нет
- Rigid Body Motion of A Floating BreakwaterДокумент17 страницRigid Body Motion of A Floating BreakwaterJesus OscoОценок пока нет
- I07CCC 03hwangДокумент8 страницI07CCC 03hwangcesarОценок пока нет
- 2104-Empirical Calculation of Roll Damping For Ships PDFДокумент18 страниц2104-Empirical Calculation of Roll Damping For Ships PDFDennys RamirezОценок пока нет
- XbhuДокумент10 страницXbhuAshish KumarОценок пока нет
- ZN 13 KornackiДокумент5 страницZN 13 KornackiMarkoNovaselićОценок пока нет
- Mir1996 PDFДокумент20 страницMir1996 PDFDaniel EscobarОценок пока нет
- Subharmonic Generation of Transverse Oscillations Induced by Incident Regular WavesДокумент9 страницSubharmonic Generation of Transverse Oscillations Induced by Incident Regular WavesJorge PalmaОценок пока нет
- Unsworth April 28 2005Документ50 страницUnsworth April 28 2005la alimudin sabaОценок пока нет
- Parametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)Документ8 страницParametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)y_596688032Оценок пока нет
- Velocity PETRELДокумент13 страницVelocity PETRELBella Dinna SafitriОценок пока нет
- Module 3-Strength-Of-Ships-Part2Документ16 страницModule 3-Strength-Of-Ships-Part2arjungireesh789Оценок пока нет
- 5 - Dynamic Effects of Ship MotionsДокумент31 страница5 - Dynamic Effects of Ship MotionsJofin LukoseОценок пока нет
- Read About Bi-Diretional Cross WaveДокумент24 страницыRead About Bi-Diretional Cross WaveSahil JawaОценок пока нет
- Oe 72 (2013) 453 SRS, CGSДокумент17 страницOe 72 (2013) 453 SRS, CGSsbnrs68Оценок пока нет
- Calibrating and Measuring Wakes and Drag Forces of Inland VesselsДокумент6 страницCalibrating and Measuring Wakes and Drag Forces of Inland Vesselsamorim.fatecОценок пока нет
- Underwater Gliders 01Документ6 страницUnderwater Gliders 01Muhammad Asher YaseenОценок пока нет
- Fulltext01Документ328 страницFulltext01Giles DomkamОценок пока нет
- 186 Tello Ruiz ManasesДокумент16 страниц186 Tello Ruiz ManasesFrederik CañabiОценок пока нет
- Wave Piercing Cat at SeaДокумент7 страницWave Piercing Cat at SeaNanda Hlaing Myint100% (1)
- A Comprehensive Study On Ship Motion and Load Responses in Short-Crested Irregular WavesДокумент16 страницA Comprehensive Study On Ship Motion and Load Responses in Short-Crested Irregular WavesrodrigoperezsimoneОценок пока нет
- Nwogu Omae 1991Документ6 страницNwogu Omae 1991mohdsolihat1Оценок пока нет
- Numerical Study On Propulsive Factors in Regular Head and Oblique WavesДокумент20 страницNumerical Study On Propulsive Factors in Regular Head and Oblique WavesMara Rebeka HerzogОценок пока нет
- Optimasi Respon Gerakan Kapal Ikan Catamaran TerhaДокумент10 страницOptimasi Respon Gerakan Kapal Ikan Catamaran TerhaNoveta FernaldinatanОценок пока нет
- Port Structures-198390-16376325723147Документ81 страницаPort Structures-198390-16376325723147pattrapong pongpattraОценок пока нет
- Unified Maneuvering and Seakeeping TheoryДокумент28 страницUnified Maneuvering and Seakeeping TheoryGeoffjones4Оценок пока нет
- Plate Boundaries and Natural HazardsОт EverandPlate Boundaries and Natural HazardsJoao C. DuarteОценок пока нет
- Troels Aagaard', Brian Greenwood and J0rgen Nielsen'Документ13 страницTroels Aagaard', Brian Greenwood and J0rgen Nielsen'Ing Carlos DuarteОценок пока нет
- Ocean Engineering: A. Fitriadhy, H. Yasukawa, K.K. KohДокумент11 страницOcean Engineering: A. Fitriadhy, H. Yasukawa, K.K. KohLenin ValerioОценок пока нет
- Computer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborДокумент12 страницComputer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborrezbahalОценок пока нет
- Ocean Engineering: Bhushan Taskar, Kevin Koosup Yum, Sverre Steen, Eilif PedersenДокумент16 страницOcean Engineering: Bhushan Taskar, Kevin Koosup Yum, Sverre Steen, Eilif PedersenAndy MirandaОценок пока нет
- B. Simpson, S. Licht, F. S. Hover and M. S. Triantafyllou: Energy Extraction Through Flapping FoilsДокумент8 страницB. Simpson, S. Licht, F. S. Hover and M. S. Triantafyllou: Energy Extraction Through Flapping FoilsXabi AlonsoОценок пока нет
- Analysis of Propulsion Performance of KVLCC2 in Waves: July 2015Документ11 страницAnalysis of Propulsion Performance of KVLCC2 in Waves: July 2015Abhishek AroraОценок пока нет
- An Analysis Method To Evaluate The Added Resistance in Short Waves Considering Bow Wave BreakingДокумент10 страницAn Analysis Method To Evaluate The Added Resistance in Short Waves Considering Bow Wave BreakingPrasad PatilОценок пока нет
- 1987 - Bowman - Shear-Wave Splitting in The Upper-Mantle Wedge AboveДокумент17 страниц1987 - Bowman - Shear-Wave Splitting in The Upper-Mantle Wedge AboveWakhidatun NisaОценок пока нет
- PIANC Bulletin116aДокумент12 страницPIANC Bulletin116aIgnatius SamrajОценок пока нет
- Vertical Ground Motions and Its Effect On Engineering StructuresДокумент9 страницVertical Ground Motions and Its Effect On Engineering Structuresbipinsh01100% (4)
- Dynamical Models of Extreme Rolling of Vessels in Head WavesДокумент27 страницDynamical Models of Extreme Rolling of Vessels in Head WavesOscar Sacases PlanasОценок пока нет
- #On The Intact Stability of A Ship in Head and Following Sea An Analysis of The Dynamic Roll Angle Due To Sudden Heeling MomentsДокумент13 страниц#On The Intact Stability of A Ship in Head and Following Sea An Analysis of The Dynamic Roll Angle Due To Sudden Heeling MomentsHigor Pereira de OliveiraОценок пока нет
- Passive Imaging of Hydrofractures in The South Belridge DiatomiteДокумент9 страницPassive Imaging of Hydrofractures in The South Belridge Diatomiteعبدالغفار بيزانОценок пока нет
- Prediction and Measurement of Propeller Singing: C e C Ec e EeДокумент1 страницаPrediction and Measurement of Propeller Singing: C e C Ec e EeArun SОценок пока нет
- Effect of Pretension On Moored Ship RespДокумент13 страницEffect of Pretension On Moored Ship RespIvandito HerdayandityaОценок пока нет
- Bollard Catalog - SPДокумент28 страницBollard Catalog - SPrisiana_limuriaОценок пока нет
- Criteria For Guide and BumperДокумент24 страницыCriteria For Guide and Bumperrisiana_limuriaОценок пока нет
- Poutrelles-Pieux Américaines À Larges AilesДокумент2 страницыPoutrelles-Pieux Américaines À Larges Ailesrisiana_limuriaОценок пока нет
- Walking Working Surfaces Handout PDFДокумент11 страницWalking Working Surfaces Handout PDFrisiana_limuriaОценок пока нет
- Campbell Chain PDFДокумент46 страницCampbell Chain PDFrisiana_limuriaОценок пока нет
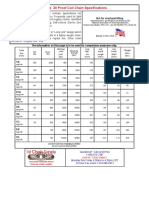
- Grade 30 Proof Coil ChainДокумент1 страницаGrade 30 Proof Coil Chainrisiana_limuriaОценок пока нет
- Avon Liferafts PDFДокумент8 страницAvon Liferafts PDFrisiana_limuriaОценок пока нет
- Katalog Wire Mesh SteelindonesiaДокумент2 страницыKatalog Wire Mesh Steelindonesiarisiana_limuriaОценок пока нет
- The C Puzzle BookДокумент93 страницыThe C Puzzle Bookabhijeetnayak67% (3)
- Infinix NOTE 5 Stylus Quick Guide: Together We Can!Документ16 страницInfinix NOTE 5 Stylus Quick Guide: Together We Can!LescribeurОценок пока нет
- ACPS CP S1 01 FDA SlidesДокумент78 страницACPS CP S1 01 FDA SlidesBlueSagaОценок пока нет
- Viscosity Measurements On Oligoesters From Terephthalic Acid and GlycoДокумент7 страницViscosity Measurements On Oligoesters From Terephthalic Acid and GlycoMaria RincondeОценок пока нет
- Maths Shortcuts by DayTodayGKДокумент20 страницMaths Shortcuts by DayTodayGKAnand KesarkarОценок пока нет
- Nut & Bolt ScienceДокумент3 страницыNut & Bolt SciencetanujaayerОценок пока нет
- DC DC BoostДокумент21 страницаDC DC BoosttrshaaaОценок пока нет
- Pov Nori Apr2007Документ31 страницаPov Nori Apr2007DMRОценок пока нет
- AKA5510EXAДокумент2 страницыAKA5510EXAСтоил СемерджиевОценок пока нет
- Data Rate Limits: Dept. of Computer Engineering Faculty of EngineeringДокумент31 страницаData Rate Limits: Dept. of Computer Engineering Faculty of Engineeringআসিফ রেজাОценок пока нет
- Thermal Analysis and Compensation of A Double Column Machining CentreДокумент9 страницThermal Analysis and Compensation of A Double Column Machining CentreShamanth CОценок пока нет
- FPM 2004Документ257 страницFPM 2004Srikant SuruОценок пока нет
- Arthashastra: Citation NeededДокумент4 страницыArthashastra: Citation NeededtusharОценок пока нет
- Mole Concept - L1rr PDFДокумент27 страницMole Concept - L1rr PDFLegend KillerОценок пока нет
- X++ Control StatementsДокумент42 страницыX++ Control StatementsHarish MehraОценок пока нет
- C 13Документ33 страницыC 13rgerwwaaОценок пока нет
- An Isogeometric Analysis Approach For The Study of Structural VibrationsДокумент59 страницAn Isogeometric Analysis Approach For The Study of Structural VibrationsBharti SinghОценок пока нет
- 3DC Real Light 24HDRi Vol03Документ27 страниц3DC Real Light 24HDRi Vol03AntezanaFernandoОценок пока нет
- Math 9 Textbook AnswersДокумент43 страницыMath 9 Textbook AnswersMehak GillОценок пока нет
- Pediatric Appendicitis ScoreДокумент6 страницPediatric Appendicitis ScorePinandhito LatukolanОценок пока нет
- Inorganic Chemistry - Lab Report 5Документ7 страницInorganic Chemistry - Lab Report 5AlpОценок пока нет
- SMO Senior 2017Документ6 страницSMO Senior 2017Kanchit SaehoОценок пока нет
- Regression Analysis AssignmentДокумент8 страницRegression Analysis Assignmentضیاء گل مروت100% (1)
- IP03 Loops-4slides PDFДокумент10 страницIP03 Loops-4slides PDFRamesh GОценок пока нет
- Abhilash Betanamudi: AchievementsДокумент3 страницыAbhilash Betanamudi: AchievementsAbhilashBetanamudiОценок пока нет
- Science 3 PDFДокумент12 страницScience 3 PDFJelyn CandoОценок пока нет
- Final Formula SheetДокумент1 страницаFinal Formula SheetFaryalОценок пока нет
- Ec2203-Unit IV Memory Devices Digital ElectronicsДокумент38 страницEc2203-Unit IV Memory Devices Digital ElectronicsKarthikeyan_Go_952567% (6)
- United States: (12) Patent Application Publication (10) Pub. No.: US 2004/0132474 A1Документ17 страницUnited States: (12) Patent Application Publication (10) Pub. No.: US 2004/0132474 A1BukОценок пока нет
- Bluetooth PresentationДокумент18 страницBluetooth Presentationarjun_rathore8178Оценок пока нет