Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Internship PDFДокумент14 страницInternship PDFIshan Mishra100% (1)
- 2050M PC PDFДокумент1 455 страниц2050M PC PDFFerney Lara100% (3)
- Daewoo Novus M2SEF Owner's ManualДокумент251 страницаDaewoo Novus M2SEF Owner's ManualAlex100% (2)
- MY15 Daytona 675R ABS BrochureДокумент8 страницMY15 Daytona 675R ABS BrochureAman GujralОценок пока нет
- UREZ6 XДокумент10 страницUREZ6 Xhai dangОценок пока нет
- MFB Training PDFДокумент19 страницMFB Training PDFhai dangОценок пока нет
- Regenerative Braking Strategy For Motor Hoist by UltracapacitorДокумент9 страницRegenerative Braking Strategy For Motor Hoist by Ultracapacitorhai dangОценок пока нет
- Hydraulic Regenerative Braking System PDFДокумент12 страницHydraulic Regenerative Braking System PDFhai dangОценок пока нет
- KoreisováG Identification-Of-Viscous SP-DFJP 2006 PDFДокумент10 страницKoreisováG Identification-Of-Viscous SP-DFJP 2006 PDFhai dangОценок пока нет
- 30 Re 20Документ4 страницы30 Re 20hai dangОценок пока нет
- " " Series Variable Displacement Piston PumpsДокумент42 страницы" " Series Variable Displacement Piston Pumpshai dangОценок пока нет
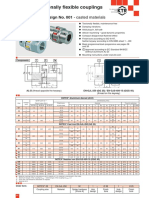
- Rotex: Torsionally Flexible CouplingsДокумент1 страницаRotex: Torsionally Flexible CouplingsL.kolekarОценок пока нет
- Polaris Trail 600-RMK Switchback Service - Manual - 2005Документ308 страницPolaris Trail 600-RMK Switchback Service - Manual - 2005Valerică HizanuОценок пока нет
- High Performance and Low CO From A Flybrid® Mechanical Kinetic Energy Recovery SystemДокумент12 страницHigh Performance and Low CO From A Flybrid® Mechanical Kinetic Energy Recovery SystemApoorva PanchalОценок пока нет
- The History of Small EngineДокумент12 страницThe History of Small EngineJastine Mico benedictoОценок пока нет
- CLUTCH - 235DTR - 267DTR - 280DTR: Renault TrucksДокумент42 страницыCLUTCH - 235DTR - 267DTR - 280DTR: Renault TrucksMax SamОценок пока нет
- Compilation of Brayton Cycle ProblemsДокумент1 страницаCompilation of Brayton Cycle ProblemsJohn JacobsОценок пока нет
- The Marine ChronometerДокумент3 страницыThe Marine ChronometerGiorgi Kandelaki0% (1)
- Vehicle Control Unit V-ECU, Function Description: Service InformationДокумент2 страницыVehicle Control Unit V-ECU, Function Description: Service Informationqwureyquwery88% (8)
- (TM) Ssangyong Manual de Taller Ssangyong Actyon 2013 en Ingles (1) - 301-400Документ100 страниц(TM) Ssangyong Manual de Taller Ssangyong Actyon 2013 en Ingles (1) - 301-400LUIS HERNANDOОценок пока нет
- CTN10 Compressor AssemblyДокумент17 страницCTN10 Compressor AssemblyKakashi KamotoОценок пока нет
- Model: GL70AA: General DataДокумент6 страницModel: GL70AA: General DatarapapauОценок пока нет
- Orca Share Media1569922103234 PDFДокумент45 страницOrca Share Media1569922103234 PDFArnel SisonОценок пока нет
- VW Scirocco 2008-2015 - 4-Cyl. Injection Engine (2.0l Engine, Turbocharger) VW R GMBH (CDLA CDLC CDLK)Документ194 страницыVW Scirocco 2008-2015 - 4-Cyl. Injection Engine (2.0l Engine, Turbocharger) VW R GMBH (CDLA CDLC CDLK)Mucowera AshaОценок пока нет
- CVT and Shift Indicator, Engine ControlДокумент20 страницCVT and Shift Indicator, Engine ControlZM OhnОценок пока нет
- Transmision d6mДокумент8 страницTransmision d6mTeresa Marina Peralta100% (5)
- KLC Series Bellows CouplingДокумент1 страницаKLC Series Bellows CouplingServo2GoОценок пока нет
- Principle of Centrifugal PumpsДокумент13 страницPrinciple of Centrifugal Pumpsvisitabhinav100% (3)
- Manual Service Whirlpool FL - 5085Документ15 страницManual Service Whirlpool FL - 5085Lucian CiolanОценок пока нет
- Power Hammer: Instructions and Parts ListДокумент14 страницPower Hammer: Instructions and Parts ListthaiОценок пока нет
- Automatic Tool Changer - WikipediaДокумент5 страницAutomatic Tool Changer - WikipediaChethan HalkurОценок пока нет
- VAIL 20 - PP: Pressure Relief ValvesДокумент2 страницыVAIL 20 - PP: Pressure Relief ValvesSachin RamadasanОценок пока нет
- Plano Explosivo & Partes y Piezas Wmf-m160gbДокумент7 страницPlano Explosivo & Partes y Piezas Wmf-m160gbCatalina GonzalezОценок пока нет
- Catalogo Peças Sany SY500HДокумент413 страницCatalogo Peças Sany SY500HcacaОценок пока нет
- 4AT Gears PDFДокумент8 страниц4AT Gears PDFNoah IstreОценок пока нет
- Normalizing NPSHДокумент5 страницNormalizing NPSHorchids28Оценок пока нет
- Detroit Diesel 91 A 93Документ3 страницыDetroit Diesel 91 A 93JoseGarzaОценок пока нет