Академический Документы
Профессиональный Документы
Культура Документы
Hydraulic System
Загружено:
Caliche GuerraАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Hydraulic System
Загружено:
Caliche GuerraАвторское право:
Доступные форматы
E215B
5 - HYDRAULIC SYSTEM
SECTION 5
HYDRAULIC SYSTEM
Lecce Training Centre 5-1
E215B 5 - HYDRAULIC SYSTEM
COLOR CODING STANDARD NEUTRAL CIRCUIT PUMP POSITIVE FLOW CONTROL servo piston, but the servo piston moves ri-
FOR HYDRAULIC CIRCUITS ghtward due to the difference of area, resulting
This section describes the following. (1) Type : in the reduction of tilt angle. Similarly, when the
(1) Bypass cut valve and unload valve control Electric flow controlled variable displacement servo piston moves rightward, the spool (652)
Blue
(2) Safety lock lever and pilot circuit pump. is moved leftward by the feedback lever.
Feed, drain circuit
(3) Pump positive flow control (2) Principle : The operation is maintained until the opening of
less than 0.44 MPa (64 psi)
(4) Pump P-Q (Pressure-Quantity) curve control The current command I to the pump’s solenoid spool sleeve is closed.
Green
Return, make up circuit, proportional valve controls the delivery rate of
OPERATION OF BY-PASS CUT VALVE the pump. PUMP P-Q CURVE CONTROL OPERATION
0.44~0.59 MPa (64~86 psi)
Purple AND UNLOADING VALVE HOUSED IN (3) Operation :
CONTROL VALVE 1) Flow rate rise operation (Eg. P1 pump) (1) Type :
Secondary pilot pressure,
By operating any of control levers, the opera- Electrical flow control type variable pump
(including proportional vlave)
(1) By-pass cut valve ting secondary pressure of pilot valve rises, and (2) Principle :
0.59~5 MPa (86~725 psi)
On starting engine, P1 and P2 unloading the rising pressure is transformed to the rise of Perform an operation of the value from pump
Red
proportional valves (PSV-D, PSV-B) output output voltage corresponding to the pressure high
Primary pilot pressure,
secondary pressure according to the command input by the low pressure sensor. pressure sensor to P-Q curve control value, and
(including proportional vlave)
output by mechatro controller, and this pressure Mechatro controller signal-processes this send a command to the pump solenoid propor-
5 MPa (725 psi)
exerts on PBp1 and PBp2 ports, and conse- change of voltage, resulting in rise of command tional valve.
Orange
quently the by-pass cut spool is switched to current value I to the pump proportional sole- (3) Operation :
Main pump drive pressure,
CLOSE side. noid valve and consequently the pump flow rate The pump high pressure sensor converts the
5~34.3 MPa (725~4970 psi)
The by-pass cut spool is usually held on rises. This is called “Positive Control System”. pressure to the output voltage corresponding to
Blue tone
CLOSE side after the engine started. And it is As the pump command current value rises, the the pump delivery pressure.
At valve operation
switched to OPEN side only when failure occur- secondary pressure of proportional solenoid The mechatro controller converts the voltage
Red valve
red on pump proportional valve and mechatro valve also rises. On the regulator attached on output by the high pressure sensor to the P-Q
When solenoid proportional
controller. the pump, the spool (652) through piston (643) curve control value. On the other hand, select
valve (reducing) is operating
is pushed leftward, and stops at the position the pump positive control command current va-
Red solenoid
(2) Unloading valve where being in proportion to the force of pilot lue from the low pressure sensor in lower order,
In active and exciting
On starting engine, like by-pass cut valve, the spring (646). and the values are output to respective pump
Displaying the flow circuit and standby circuit
secondary pressures output by P1 and P2 The tank port connected to the large bore of proportional valve as a command current.
when operating.
unloading proportional valves (PSV-D, PSV-B) servo piston (532) opens, and the piston moves With this operation, the pump power is control-
Regarding the electrical symbols in this manual,
exert on PCb and PCa ports, consequently the leftward by delivery pressure P1 of the small led so as not to be exceed the engine power,
refer to the electric circuit diagram.
P1 and P2 unloading valves are switched to bore resulting in the increase of tilt angle ( ). therefore engine dose not stall.
OPEN side. The servo piston and spool (652) are connec-
ted to feedback lever (611). Therefore when
Remark: all the following hydraulic circuits are SAFETY LOCK LEVER AND PILOT servo piston moves leftward, the spool (652)
relevant to the japanese version of the machine; CIRCUIT also moves rightward by means of feedback
there are some little differences in comparison lever. With this movement, the opening of spool
with our european version, but the principles of (1) Purpose : sleeve closes gradually, and the servo piston
working are exactly the same; for that reason To protect attachment from unexpected move- stops at the position the opening closed com-
they are helpful for our understandings as well. ment for safety. pletely.
Only the circuits relevant to combined move- (2) Principle : 2) Flow rate reduction operation
ment Travel & Attachment and to Pressure Cut pressure source of pilot valve for operation. As the current value I of mechtro controller
Draining are managed differently in the euro- (3) Operation : reduces, the secondary pressure of solenoid
pean machines, that’s why for these circuits If the safety lock lever (red) is pushed forward proportional valve reduces, and spool (652)
we will use not the japanese drawings, but the after the engine starts, the limit switch (SW-11) is moved rightward by the force of pilot spring
european ones. is turned on. The timer relay is actuated one (646). With the movement of spool, the delivery
second later which causes the solenoid (SV-4) pressure P1 usually flows into the large bore of
of the solenoid valve block (13) to be energized piston through the spool.
and makes the pilot operating circuit to stand The delivery pressure P1 flows in the small
by. bore of
Lecce Training Centre 5-2
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
651
652 M
1 29.0MPa
611 D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
643
a3
532 8
646 a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
T2 P2 1. NEUTRAL CIRCUIT
13
Lecce Training Centre 5-3
E215B 5 - HYDRAULIC SYSTEM
TRAVEL CIRCUIT 2-SPEED TRAVEL SOLENOID COMMAND
CIRCUIT AND AUTO 1st SPEED RETURN
This section describes the following. FUNCTION
(1) Travel forward pilot simultaneous operation
circuit (1) Purpose :
(2) 2-speed travel solenoid command circuit and Change travel motor speed with switch.
auto 1-speed return function (2) Principle :
(3) Travel main circuit If the switch is turned, an electric signal is
(4) Travel motor function issued. It excites the 2-speed travel solenoid
which in turn converts the primary pilot pres-
TRAVEL FORWARD PILOT sure and the self pressure to a tilting angle of
SIMULTANEOUS OPERATION CIRCUIT the variable displacement motor.
(3) Operation :
(1) Purpose : If the rabbit marked switch on the gauge
Light operating force and shockless operation cluster is pressed, the solenoid (SV-3) of the
(2) Mechatronics : proportional valve block (13) is excited and
1) If the travel lever with damping mechanism is changes the proportional valve. Then the so-
operated for travel right, left and forward lenoid command pressure is issued from port
motions, the secondary pilot proportional A3, enters the P port of the travel motor (4),
pressure comes out of the 3, 1 ports of P/V (10). opens the oil passage to the 2nd speed select
The higher of the pressures is selected, comes piston, and causes the motor to run in the 2nd
out of the 6, 5 ports and acts upon the low speed tilting mode by its self pressure. Howe-
pressure sensors (SE9) (SE-10). ver, when the main circuit pressure rises above
2) The pilot secondary pressure flows to PAr 28 MPa (4060 psi), the motor’s self pressure
and PAL ports of the control valve (2), moves pushes the 2nd speed select piston back to the
the travel spool, and switches the main circuit. 1st speed.
3) The low pressure sensor output voltage is
input into mechatro controller. The mechatro TRAVEL MAIN CIRCUIT
controller performs signal processing and
outputs current corresponding to the increase (1) Operation :
of flow rate to P1 pump proportional valve The delivery oil from Pump A1 and A2 ports by
(PSV-P1) and P2 pump proportional valve changing the travel spool with the operation of
(PSV-P2), and at the same time the command travel pilot flows in each VA port on the left side
current is output to P1 unloading valve (PSV-D) of travel motor (4) through C,D ports of swivel
and P2 unloading valve (PSV-B). joint (8) from AL, AR ports of C/V, and rotates
4) The secondary pressures output by P1 pump the travel motor.
proportional valve (PSV-P1) and P2 pump
proportional valve (PSV-P2) exert on pump TRAVEL MOTOR FUNCTION
regulator, actuating the pump on the delivery
flow rate increase side. (1) Function :
5) The secondary pressure delivered in P1 1) Prevents the motor from over running on a
unloading valve (PSV-D) and P2 unloading slope.
valve (PSV-B) is fed to PBp1, Pcb, PBp2 and 2) Check valve that prevents cavitation of the
PCa ports provided in control valve (2). hydraulic motor.
The secondary pressure from proportional 3) Shockless relief valve and anti cavitation
valve which has exerted on PBp1 and PBp2 valve when inertia force stops.
ports holds the by-pass cut spool on CLOSE 4) High/Low 2 step speed change mechanism
side, like the operation in the lever neutral and auto 1st speed return at high load.
position. 5) Travel parking brake.
The secondary pressure from proportional
valve which has exerted on PCb and PCa ports
switches the unloading spool in CLOSE side.
Lecce Training Centre 5-4
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8 35.8~37.8 SWING
MPa VB VB MPa
PG
VA VA DB
REG REG
M
29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3 a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA)
MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
ARM OUT
CMR1
PL ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
BL P P P P P P
CT2 CP2
BOOM T3 1 2 3 4 5 6 7 8
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs
As
37.7MPa Bs
(ROD)Bb PAa1
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1 37.7MPa ARM
CRar CYLINDER
(ROD)Bc PLc2
TRAVEL
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2 OPTION
LCo
PAo
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
2. TRAVEL
A8 ARM2
PSV-A
T2 P2
Lecce Training Centre 5-5
E215B 5 - HYDRAULIC SYSTEM
BUCKET CIRCUIT 5) The secondary pressure delivered in travel 3) With the function of pilot circuit, the oil flow is
straight proportional valve (PSV-C) is led to switched from bucket spool, and is fed into
This section describes the following. PTb port provided in control valve (2) and shifts bucket cylinder head side through AC port of C/
(1) Bucket digging pilot circuit the travel straight valve one stage. V (2). On the other hand, the return oil from
(2) Auto accel operation cylinder rod (R) side is throttled by bucket spool
(3) Flow control in the work mode AUTO ACCELERATION OPERATION and returns to tank circuit from BC port of C/V
(4) Bucket digging travel straight main circuit (2).
(5) Bucket spool stroke limiter (1) Principle : References :
Auto acceleration actuates according to signals • In bucket dumping operation, the travel
PILOT CIRCUIT FOR BUCKET DIGGING from low pressure sensor. straight valve also switches like digging opera-
(2) Operation : tion, resulting in confluence with travel straight.
(1) Mechatronics : <When lever is set to neutral position> • When the bucket operation and other opera-
1) When the operation for bucket digging is In the event where the sensor does not receive tion are simultaneously performed, the travel
performed, the pilot proportional secondary signal for 4 seconds or more even though the straight valve does not actuate, resulting in
pressure is delivered through port 1 of the right acceleration dial is set to MAX position, the en- single flow of bucket circuit.
pilot V (9), flows to PAc port, and acts on the gine speed should be raised to 1000rpm.
low pressure sensor (SE-1), and at the same <When lever is operated> BUCKET SPOOL STROKE LIMITER
time the bucket spool is switched. When the pressure 0.6MPa (87psi) is input to
2) The voltage output by low pressure sensor low pressure sensor in STD specification (tra- (1) Purpose :
inputs in mechatro controller. The mechatro vel, bucket, swing, arm), proportional voltage To secure simultaneous operability of boom and
controller performs signal processing and from low pressure sensor inputs in mechatro arm on boosting up attachment pressure (Pump
outputs current corresponding to the increase controller, and then the engine speed returns to flow rate decreases.) and to prevent cavitations
of pump flow rate to pump proportional valves the dial set position corresponding to the lever at low engine speed
(PSV-P1) and (PSV-P2) on the P1 and P2 operation. (2) Operation :
pump sides, and at the same time the On boosting up attachment pressure, pilot
command current is output to P1 unloading STAND-BY CURRENT CONSTANT CONTROL primary pressure exerts on PCc port of C/V(2)
valve (PSV-D), P2 unloading valve (PSV-B) through attachment booster solenoid valve,
and travel straight proportional valve (PSV-C). (1) Principle : operates stroke limiter of bucket spool, and
In the following pages, the relation of operation When the engine speed is intermediate speed throttle oil path of spool.
of low pressure sensor to both the increase of or lower, command current value to have the As a result, P1 pump pressure increases,
pump flow rate and unloading proportional pump delivery rate constant is output. making the simultaneous operation of boom up
valve is the same. Therefore the explanation is (2) Operation : and bucket digging possible.
omitted. Even if the engine speed specified by accelera- Even though the engine speed is low, similarly
3) The secondary pressure output by P1 pump tion potentiometer is low speed, as the delivery the cavitations can be prevented by actuating
proportional valve (PSV-P1) and P2 pump rate corresponds to the intermediate speed, the the stroke limiter.
proportional valve (PSV-P2) exerts on pump actuator moves earlier than the movement
regulator, actuating the pump onto the delivery equivalent to the control lever angle rate in light
flow increase side. load operation.
4) The secondary pressure delivered in P1
unloading valve (PSV-D) and P2 unloading BUCKET DIGGING AND TRAVEL STRAIGHT
valve (PSV-B) is led to PBp1, PCb, PBp2 and CONFLUENCE (CONFLUX) MAIN CIRCUIT
PCa ports provided in control valve (2). (1) Operation :
The secondary pressure from proportional 1) The oil delivered through A1 port of P1 pump
valve which has exerted on PBp1 and PBp2 goes into P1 port of C/V (2), opens load check
ports holds the by-pass cut spool on CLOSE valve LCc through parallel circuit and enters in
side, like the operation in the lever neutral bucket spool.
position. 2) On the other hand, the oil delivered through
The secondary pressure from proportional P2 port of P2 pump goes into P2 port of C/V
valve which has exerted on PCb and PCa ports (2), confluences with oil from P1 pump through
switches the unloading spool in CLOSE side. travel straight valve, and goes into bucket
spool. (Confluence of oil from 2 pumps)
Lecce Training Centre 5-6
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
3. BUCKET
T2 P2
13
Lecce Training Centre 5-7
E215B 5 - HYDRAULIC SYSTEM
BOOM CIRCUIT
This section describes the boom raise conflux
operation.
(1) Boom up pilot circuit
(2) Boom up 2 pumps conflux main circuit in C/V
BOOM RAISE PILOT CIRCUIT
(1) Operation :
1) If boom up operation is performed, the
secondary pilot proportional pressure from the
right pilot valve (10) gets out of port 3 and acts
upon the low pressure sensor (SE3). At the
same time, the pressure acts upon the PAb and
PB1 ports.
2) The secondary pressure which enters the
PAb port of C/V (2) shifts the boom spool. The
secondary pressure which enters the PB1 port
shifts the boom conflux spool.
BOOM UP 2 PUMPS CONFLUX MAIN
CIRCUIT IN C/V
(1) Purpose :
Boom up speed up
(2) Principle :
Confluxing oil from 2 pumps
(3) Operation :
1) The oil delivered through A1 port of P1 pump
flows into C/V (2) P1 port, and branches into
bypass circuit and parallel circuit. Since P1
unloading valve is closed, the boom spool is
moved and bypass circuit is closed, the oil
opens load check valve LCb through parallel
circuit and flows into boom spool.
2) Then the oil passes through boom spool,
opens lock valve of boom lock valve CRb, and
is led into H side of boom cylinder through C/V
(2) Ab port.
3) Meanwhile, the oil delivered from the A2
port of the P2 pump enters the P2 port of C/V
(2) and due to shut off the P2 unloading valve,
the oil then passes through the parallel circuit
and via the restrictor on the circumference of
the boom conflux spool, pushes the load check
valve CCb open from the boom conflux circuit,
and combines the oil delivered by the P1 pump
internally.
4) The return oil from boom cylinder R side
flows into tank circuit through boom spool from
C/V (2) Bb port.
Lecce Training Centre 5-8
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
4. BOOM UP
T2 P2
13
Lecce Training Centre 5-9
E215B 5 - HYDRAULIC SYSTEM
This section describes boom lower operation. CONSTANT RECIRCULATION FUNCTION OF
(1) Boom down pilot circuit BOOM DOWN MAIN CIRCUIT
(2) Prevention of natural fall by lock valve and
actuation at lowering (1) Purpose :
(3) Constant recirculation function of boom down Prevention of cavitation during boom lowering
main circuit motion.
(2) Principle :
BOOM DOWN PILOT CIRCUIT The oil returning from the boom cylinder head (H)
is recirculated to the rod (R).
(1) Operation : (3) Operation :
1) If the boom down operation is performed, the When the oil is supplied to the boom cylinder rod
secondary pilot proportional pressure comes (R) side during boom down operation, the boom
out of portáC of the right pilot valve (9) and acts moves faster than it should do in some cases by
upon the low pressure sensor (SE-4). the self weight of the attachment.
At the same time, the pressure acts upon the On that occasion, the circuit pressure on the rod
PBb port of C/V (2). (R) side is on the negative side.
2) The voltage output of the low pressure sensor The oil supplied to the boom cylinder rod (R)
(SE-4) enters the mechatro controller and flows into the A1 port of the P1 pump and the P1
processed in it. port of C/V. The oil then passes through the boom
3) Then, the proportionl secondary pressure fed spool and goes out of the Bb port.
into C/V (2) PBb port and branches off in two On that occasion, the oil returning from the head
lines and switches boom spool and releases (H) goes through the recirculation path in the
boom lock valve. boom spool, pushes the check valve in the spool
PREVENTION OF NATURAL FALL BY LOCK open, is recirculated to the Bb port and is sup-
VALVE AND ACTUATION AT LOWERING plied to the rod (R). When the (R) pressure is lar-
ger than the head (H) pressure, the check valve
(1) Purpose : in spool closes.
Prevention of natural fall when the lever is neutral Thereupon, the recirculation is stopped.
(2) Principle :
The oil is prevented from returning to the boom
spool by the poppet seat of the boom lock valve.
(3) Operation :
In the boom down action, the selector valve is
changed over by the secondary proportional
pressure of PBb port. Then the poppet spring
chamber of the lock valve CRb gets through the
drain line (Dr) and makes the lock valve poppet
open.
When the boom lever is at neutral, the drain line
on the lock valve CRb poppet spring chamber is
closed which causes the poppet closed.
The result is that the oil returning from the boom
cylinder head (H) to the boom spool is held and
makes the leak from the boom spool zero.
Thus the boom cylinder is prevented from making
a natural fall.
Lecce Training Centre 5-10
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
5. BOOM DOWN
T2 P2
13
Lecce Training Centre 5-11
E215B 5 - HYDRAULIC SYSTEM
SWING CIRCUIT
SWING MAIN CIRCUIT
This section describes the following operations.
(1) Swing left pilot circuit (1) Operation :
(2) Swing auto parking brake The oil delivered from the A2 port of the P2 pump
(3) Swing main circuit enters the P2 port of C/V (2) and is branched off
(4) Swing motor circuit into the bypass line and the parallel circuit. Howe-
ver, since the bypass line is closed as the swing
PILOT CIRCUIT FOR LEFT SWING spool is shifted, the oil pushes the load check
valve LCs open through the parallel circuit, enters
(1) Operation : the B port of the swing motor via the Bs port of
1) When the left swing operation is performed, C/V (2), and rotates the swing motor countercloc-
the pilot proportional secondary pressure is kwise.
delivered through port (5) of left pilot V (9), and
the secondary pressure acts on PBs port of C/ SWING MOTOR CIRCUIT
V (2), and simultaneously flows out from Pss
port of C/V and acts on low pressure sensor (1) Anti cavitation circuit at swing deceleration
(SE-5). (2) Shockless relief valve that prevents the swing
2) The voltage output by the low pressure sen- motor from being reversed.
sor is input in the mechatro controller, and is
signalprocessed.
3) Then, the secondary pressure led into PBs
port of C/V (2) switches the swing spool.
SWING AUTO PARKING BRAKE
(1) Purpose :
Swing lock in neutral position and parking
(2) Principle :
Release mechanical brake only when required
to operate swing and arm in.
(3) Operation :
1) The swing parking system excites the swing
parking SOL (SV-1) usually if the key switch is
turned on and works by the action of the
mechanical brake.
2) The mechanical brake is released if the
swing parking solenoid is de-excited only when
the secondary operating pressure in the swing
and arm in actions acts upon any of the low
pressure sensors (SE-5, 7).
3) The swing parking solenoid (SV-1) is excited
five seconds after the pressure of the swing low
pressure sensors (SE-5) is reduced to zero.
In the case of arm in operation, the swing
parking solenoid (SV-1) is excited the moment
the pressure of the arm in low pressure sensor
(SE-7) is reduced to zero. This causes the
mechanical brake to operate.
Lecce Training Centre 5-12
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
6. SWING
PSV-A
T2 P2
13
Lecce Training Centre 5-13
E215B 5 - HYDRAULIC SYSTEM
ARM CIRCUIT delivery oil in the valve section, and then is In light-load arm-in operation (normal recircu-
flowed into arm cylinder head (H) side through lation, conflux), when the attachment to which
This section describes the following operations. Aa port of C/V (2) the circuit in P1 pump side is applied is opera-
(1) Arm in, light-load operating pilot circuit 3) The return oil from arm cylinder (R) side ted, the meter-in path of arm 2 spool is closed,
(2) Arm in, light-load variable normal recircula- flows in Ba port of C/V (2) and passes through resulting in single flow operation (see figure
tion main circuit / internal conflux main circuit the Ba port because the arm lock valve CRar below).
is open, and is flowed into arm 2 spool through
ARM IN, LIGHT-LOAD OPERATING PILOT arm 1 spool.
CIRCUIT 4) Because arm 2 spool is switched to normal
recirculation position, causing restriction of
(1) Purpose : passage to tank, the return oil from arm cylin-
Speed-up and Anticavitation when the arm is at der (R) side flows into arm cylinder (H) side.
light loaded. • Because, at light load, the pressure in
(2) Principle : cylinder rod (R) side is higher than that in
The oil returning from the arm cylinder rod (R) the head (H) side, it opens the check valve
is recirculated variably to the head (H) at arm 2 housed-in arm 2 spool and is recirculated in
spool in C/V. the head (H) side, resulting in the speed up
(3) Operation : of arm-in operation at light load.
1) When the arm in operation is performed, the 5) Cavitations prevention control in arm-in
secondary pilot proportional pressure gets out operation
of port 7 of the left pilot valve (9) and acts upon Command current is output to arm 2 solenoid
the low pressure sensor (SE-7). proportional valve by signal processing of E/G
At the same time, the pressure is branched off speed and arm-in pilot pressure, accordingly
in two flows, acts upon the Paa1 port and the the arm 2 spool is switched to neutral
PLc2 port, changes over the arm spool and the (cavitations prevention) position, resulting in
arm lock valve CRar. releases. cavitations prevention.
2) The output voltage by the low pressure sen-
sor is input into mechatro controller, and is pilot POSITION OF ARM 2 SPOOL
signal-processed, and is output to P1, P2 pump
Neutral poosition Normal recirculation
proportional valve (PSV-P1), (PSV-P2) and arm
2 inverse proportional valve (PSV-A). (anticavitation position) position
3) The secondary pressure from pilot proportio- Recirculation
nalvalve, which is reduced by arm 2 inverse
proportional valve (PSV-A) switches arm 2
spool. from arm out
P/V
ARM-IN, LIGHT-LOAD VARIABLE NORMAL From arm 2 inverse
RECIRCULATION, INTERNALCONFLUX
proportional valve
MAIN CIRCUIT
(1) Operation :
1) The P2 pump delivery oil flows in travel left Spool position at arm in, light load and combined operation
section through P2 port of C/V (2) and is (This position is not shown in hydraulic diagram)
branched off in by-pass circuit and parallel
circuit, but because arm 1 spool is switched,
Meter-in passage
the delivery oil which goes through parallel cir- Neutral position
cuit opens load check valve LCa and is flowed (close)
into arm 1 spool.
2) On the other hand, P1 pump delivery oil
flows in travel right tandem path. Then because
arm 2 spool was switched, the delivery oil Normal recirculation
opens load check valve LCAT2, goes through Arm 2 spool position
arm 2 spool, and confluences with P2 pump
Lecce Training Centre 5-14
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
7. ARM IN LIGHT LOAD
PSV-A
T2 P2
13
Lecce Training Centre 5-15
E215B 5 - HYDRAULIC SYSTEM
This section describes the following operations. in Ba port of C/V(2) and is flowed to arm lock
(3) Arm in, heavy load operating pilot circuit valve CRar, but because the arm lock valve
(recirculation cut) CRar is open, the return oil goes through arm
(4) Arm in, heavy load operating sequence lock valve CRar and flows in arm 2 spool.
confluxed 4) The return oil returns directly into tank circuit
main circuit because arm 2 spool is switched to
recirculation cut position.
ARM IN, HEAVY LOAD OPERATING
PILOT CIRCUIT
(1)Operation:
1) In arm-in operation, when the heavy loading Position of arm 2 spool
is applied to arm and the P2 pump pressure Position of arm 2 spool
increases to the set pressure, the voltage Neutral position Recirculation pos.
output by P2 pump pressure sensor (SE-23) is
converted to signal (signal processing) by
mechatro controller, consequently the current from arm out
of arm 2 solenoid proportional valve is control- P/V
led according to the load pressure and
the arm variable recir culation is cut. From arm 2 inverse
When the recirculation is cut, internal confluen- proportional valve
ce is held similarly to that in light load opera-
tion.
2) Left pilot valve actuation due to arm-in
operation is equivalent to that at light load
operation.
22.9.4 ARM IN, HEAVY LOAD OPERATING
RECIRCULATION CUT MAIN CIRCUIT
(1) Purpose :
Speed up for arm in operation
(2) Principle :
Cut the recirculation and reduce rod pressure.
(3) Operation :
1) P2 pump delivery oil flows in the travel left
section through P2 port of C/V (2) and
branched off in by-pass circuit and parallel
circuit. Consequently the arm spool is switched
and pushes and opens load check valve LCa
through parallel circuit, and flows in the arm
spool.
2) On the other hand, P1 pump delivery oil
flows in P1 port of C/V (2), and flow in travel
right tandem passage through travel straight
section.
Then because arm 2 spool was switched, the
delivery oil opens load check valve LCAT2, and
22-22 confluences with P2 pump delivery oil in the
valve section, and is flowed into arm cylinder
head (H) side through Aa port of C/V(2).
3) The return oil from arm cylinder (R) side
flows
Lecce Training Centre 5-16
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17 8. ARM IN HEAVY LOAD
A8 ARM2
PSV-A
T2 P2
13
Lecce Training Centre 5-17
E215B 5 - HYDRAULIC SYSTEM
This section describes the following operations. NATURAL FALL PROTECTION WITH ARM
(5) Arm out pilot circuit LOCK VALVE
(6) Arm out 2 pumps conflux main circuit
(7) Natural fall protection with arm lock valve (1) Purpose :
To prevent the arm from falling naturally by the
ARM OUT PILOT CIRCUIT weight of the arm and bucket.
(2) Principle :
(1) Operation : Complete seat of the return circuit against the
1) When the arm out operation is performed, arm spool of the arm cylinder (R) side circuit.
the secondary pilot proportional pressure gets (3) Operation :
out of port 8 of the left pilot valve (9), and acts 1) When the secondary pressure for arm
upon the low pressure sensor (SE-8). At the operation disappears and the arm cylinder
same time, the oil is branched off in two flows stops, the pressure on the rod (R) side passes
and act upon the PBa1 and Pba2 ports of C/V through the selector of the lock valve from the
(2). Ba port of C/V, acts the back pressure on the
2) The operating proportional secondary pres- lock valve CRar and seats the lock valve.
sure flowed in Pba1 port of C/V (2) switches 2) Since the oil flow into the arm spool from the
the arm 1 spool. lock valve is shut off completely, natural fall of
3) Then, the operating secondary pressure the arm due to oil leaks through the arm spool
flowed in PBa2 port of C/V (2) switches the arm is prevented.
2 spool valve.
ARM OUT 2 PUMPS CONFLUX MAIN
CIRCUIT
(1) Purpose :
Arm out operation speed up.
(2) Principle :
The oil delivered by the P1 pump is confluxed
with that delivered by the P2 pump in C/V (2).
(3) Operation :
1) P1 pump delivery oil opens load check valve
(LCAT2) by switching arm 2 spool and
confluxes with P2 pump delivery oil just short of
the arm lock valve.
2) And, P2 pump delivery oil flows through arm
1 spool and confluences with P1 delivery oil,
opens lock valve of arm lock valve CRar with
free flow and is flowed into arm cylinder rod (R)
side through Ba port of C/V(2).
3) On the other hand, the return oil from arm
cylinder (H) side flows in Aa port, and returns
into tank circuit through arm 1 spool and arm 2
spool.
The return line which does not pass through
boost check valve is used for this return circuit
to reduce the pressure loss.
Lecce Training Centre 5-18
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
BOOST
15 14 PL
CMR1
CHECK ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17 9. ARM OUT
A8 ARM2
PSV-A
T2 P2
13
Lecce Training Centre 5-19
E215B 5 - HYDRAULIC SYSTEM
COMBINED CIRCUIT (In travel straight operation, P1 pump delivery
oil exerts on swing operation of attachment.)
This section describes only the difference in 3) The delivery oil flowed into P2 tandem circuit
combined operation. of
(1) Boom up / travel, pilot circuit P2 pump flows in left travel spool to travel
(2) Boom up / travel, main circuit leftward.
(3) Boom up / travel, short circuit valve The delivery oil flowed into travel straight spool
of P2 pump flows in right travel spool because
BOOM UP / TRAVEL, PILOT CIRCUIT the travel straight spool is shifted and exerts on
the right travel operation.
(1) Operation : (In travel straight operation, P2 pump delivery
<Operation: Different point of pilot circuit from oil exerts on travel operation.)
independent operation >
1) The mechatro controller outputs command BOOM UP / TRAVEL, SHORT CIRCUIT VALVE
current to travel straight solenoid proportional
valve (PSV-C) and short circuit solenoid Mechatro controller outputs command current
proportional valve (PSV-R) after signal pro- to short circuit proportional solenoid valve after
cessing; the solenoid valves output secondary signal processing; the secondary pilot pressure
pressures and act on PTb port of C/V and on can move the short circuit valve in three different
short circuit valve. positions, depending on the command current
2) Then the pressure of PTb port switches the received.
travel straight valve; the secondary pressure
of solenoid proportional valve switches spool Positions of Short circuit valve
of short circuit valve.
Neutral position:
BOOM UP / TRAVEL, MAIN CIRCUIT every time the travel is not operated fully stroke;
in this conditions, it’s just like short circuit valve
(1) Purpose : is not present.
To insure straight travel movement during tra-
vel operation even if the attachment is opera- Middle position:
ted. travel pedals and boom up lever are operated
(2) Principle : fully stroke; in this conditions, the effect of short
The travel action and the attachment action circuit valve is to divide the total oil flow into 70
are actuated by separate pumps. % to travel and 30 % to boom up.
(3) Operation :
1) P1 pump delivery oil flows through P1 port Final position:
of C/ V(2) and branches off in P1 parallel cir- travel is operated fully stroke and boom up lever
cuit and travel straight spool. only lightly; in this conditions, the effect of short
P2 pump delivery oil flows through P2 port of circuit valve is to divide the oil flow according to
C/ V(2) and branches off in P2 tandem circuit the boom up pilot signal: the less is the boom
and travel straight spool. up pilot signal, the less is the oil flow to boom up
2) The delivery oil flowed into P1 parallel cir- cylinders and consequently the more is the oil
cuit of P1 pump opens check valve CT1 and flow to travel motors.
LCb and flows in boom spool, which exerts on
boom up operation.
The delivery oil flowed into travel straight
spool of P1 pump opens check valve CT2
because the travel straight spool is shifted,
and flows in boom conflux spool and exerts
on boom up operation with the internal oil
conflux.
Lecce Training Centre 5-20
E215B 5 - HYDRAULIC SYSTEM
P MB MB P
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8 35.8~37.8 SWING
MPa VB VB MPa
PG
VA VA DB
REG REG
M
29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3 a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA)
MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
ARM OUT
CMR1
PL ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
BL P P P P P P
CT2 CP2
BOOM T3 1 2 3 4 5 6 7 8
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs
As
37.7MPa Bs
(ROD)Bb PAa1
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1 37.7MPa ARM
CRar CYLINDER
(ROD)Bc PLc2
TRAVEL
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2 OPTION
LCo
PAo
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
PSV-A
A8 ARM2 10. TRAVEL & BOOM UP
T2 P2
Lecce Training Centre 5-21
E215B 5 - HYDRAULIC SYSTEM
In this section, the independent operation is was switched.
omitted and describes difference in combined The conflux oil of P1 and P2 delivery oil in high
operation. pressure flows in swing side taking priority over
(3) Swing / Arm in light load, pilot circuit all others.
(4) Swing / Arm in, swing priority main circuit This operation is called “Swing Priority Circuit”.
SWING / ARM IN LIGHT LOAD, PILOT
CIRCUIT
(1) Operation : Position of arm 2 spool
1) On operating swing (left) and arm in motions
simultaneously, mechatro controller outputs Position of forced
command current to travel straight solenoid recirculation
proportional valve (PSV-C) and arm 2 solenoid Neutral position Meter-in passage
(close)
inverse proportional valve according to signal
processing, and this proportional valve outputs from arm From arm
2 inverse
secondary pressure, which acts on PTb port out P/V proportional
and PAa2 port of C/V(2). valve
2) PTb port pressure switches the travel
straight spool 2 steps, and the PAa2 port pres- Normal recirculation
Arm 2 spool position
sure switches the arm 2 spool to the forced
recirculation position.
SWING / ARM IN, SWING PRIORITY MAIN
CIRCUIT
(1) Purpose :
Stable swing speed.
(2) Principle :
Raise the oil pressure flowing to arm cylinder,
and give a priority of the delivery of P2 pump to
swing operation.
(3) Operation :
1) The swing main circuit operates with P2
pump flow. But on P2 pump circuit side, the
flow goes to the swing circuit and arm circuit
simultaneously because the swing circuit and
arm circuit are parallel. Then since the return
oil from arm cylinder rod (R) side is restricted in
the arm 2 spool because the arm 2 spool is
switched to forced recirculation position, the
pressure of return oil is raised, causing the rise
of circuit pressure on the arm cylinder head (H)
side.
2) At the same time meter-in of arm 2 spool
closes and arm in conflux is therefore can-
celled, and delivery oil from P2 pump and P1
pump are combined in the parallel circuit on
P2 pump side because the travel straight spool
Lecce Training Centre 5-22
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
11. SWING & ARM IN
T2 P2
13
Lecce Training Centre 5-23
E215B 5 - HYDRAULIC SYSTEM
PRESSURE DRAINING (RELEASING) (3) Operation :
CIRCUIT 1) Pump proportional valves reduce the pump
flow rates to the minimum.
2) Unloading proportional valves (PSV-D, PSV-
This section describes the following operations.
B) output secondary pressure and the secondary
(1) Pressure drain (releasing) pilot circuit
pressure flows in PCb, PCa ports of C/V(2) and
(2) Pressure drain (releasing) main circuit
switches the P1, P2 unloading valves to OPEN
position.
PRESSURE RELEASING PILOT CIRCUIT
PRESSURE RELEASE MAIN CIRCUIT
(1) Purpose :
To release the pressure in main circuit for pi-
(1) Operation :
ping repair works.
When the operating lever is shifted to neutral du-
(2) Principle :
ring engine running, “DRAINING HYD. PRESS.”
After the mode is switched to “Pressure Relief
is displayed on the gauge cluster while the mode
Mode” with switch on gauge cluster, mechatro
switch is changed to pressure releasing mode.
controller outputs the following commands.
In this time the intermittent buzzer sounds conti-
1) Minimum tilting command value to pump
nuously. When right and left operating levers are
proportional valves (PSV-P1, PSV-P2).
operated 4 or 5 times to their full stroke, pressure
2) Output “Pressure relief control speed com-
is relieved.
mand value” to the engine speed governor.
After draining pressure is completed, turn off the
3) Stand-by command value to P1, P2 unloa-
starter key and buzzer sound stops. If the pump
ding proportional valves.
pressure is determined to be more than 1 MPa
(145 psi) by the output values of the high pres-
sure sensor or the high pressure sensors (SE-
How to switch to “Pressure relief mode”
22,23) are broken, “FAIL DRAIN HYD. PRESS” is
displayed and the buzzer sounds continuously. In
1) Select the Service Diagnosis mode (kee-
that case, also the buzzer is not stopped unless
ping pressed the ‘BUZZER STOP SWITCH’ on
the engine key is turned to OFF. Repeat the pres-
gauge cluster, turn the starter key on).
sure releasing procedure once again.
(2) Hydraulics :
2) Select Service Adjustment mode 1 (under
If the unloading valves are turned to the pressure
the condition that Screen n° 1 of Service Dia-
release position, the oil delivered by each pump is
gnosis mode 1 is indicated, keeping pressed
unloaded to the tank passage. If the spools are
the button ‘PRESET BY FACTORY’, press the
switched by pilot operation, the remaining pressu-
selector switch 3 times. When ‘LANGUA-
re from the actuators may be relieved to the tank
GE/LOGO’, ‘ADJUSTING MODE 1’ and ‘PRE-
circuit, i.e. the main circuit pressure may be
SET BY FACTORY’ are displayed, press
released.
or switch and highlight ‘ADJUSTING
MODE 1’, and then press ‘Selector Switch’
again).
3) When ‘ADJUSTING MODE 1’ screen is dis-
played, press or switch, and ‘DRAIN
HYD. OFF’ screen appears.
4) Press ‘Selector switch’ and highlight ‘OFF’,
and press switch to change to ‘DRAIN
HYD. ON’, and then press ‘Selector switch’
again.
Lecce Training Centre 5-24
E215B 5 - HYDRAULIC SYSTEM
SE22 SE23 P MB MB P
P P
MAIN PUMP PSV1 a1 A1 A2 a2 PSV2
PH1 PH2
PSV-P1 PSV-P2
4
Pcr Pcr
35.8~37.8
MPa VB VB
35.8~37.8
MPa 3 SWING
PG
VA VA DB
REG REG
1 29.0MPa
D MA MA D
PB PA
TRAVEL RIGHT TRAVEL LEFT
a3
8
a4
Dr
5.0MPa
M A B
a5
114kw B1
/2000min-1 B3 Dr3 A3
PTO
(OCEANIA) 2
11 MAIN CONTROL VALVE P2 P1 T1 T2 SWING RIGHT
34.3MPa
37.8MPa SWING LEFT
15 14 PL
CMR1
ARM OUT
ARM IN
PTb CMR2 PBL BUCKET DUMP
TRAVEL BUCKET DIGGING BOOM UP
P1UNLOAD PRIORITY TRAVEL LEFT BOOM DOWN
PCb PAL
AL SE1 SE2 SE3 SE4 SE7 SE8
12 CT2 CP2
BOOM
BL
1
P P
2
P P
3 4 5 6 7
P P
8
T3
HYD.TANK TRAVEL RIGHT P2UNLOAD CONFLUX
PAr CT1 PB1
BR CP1
PCa K M H
AR
PBr CCb
PAs
Dr 1 2 3 4 5 6 7 8
SE5
BOOM LCb LCs Pss
SWING P
PBb PBs 16
As (OCEANIA)
(ROD)Bb
37.7MPa Bs
PAa1
9
CRb
LCa RH LH
(HEAD)Ab
39.7MPa ARM 1
SOL/V BLOCK PBa1
PAb BUCKET
P1 CYLINDER
LEVER
A1 LOCK 37.7MPa
SV-4
7
BUCKET LCc Aa (HEAD)
PCc P T P T
SWING PBc BOOM ARM
A2 P/B & BUCKET & SWING
SV-1
TRAVEL
(ROD)Bc
37.7MPa
CRar
PLc2
ARM
CYLINDER 6
1/2 SPEED (HEAD)Ac RH LH
P T
A3 CHANGEOVER Ba (ROD)
SV-3 39.7MPa
39.7MPa
PAc
ATT LCAT2
A4 BOOSTING ARM 2
SV-2 PBa2 LCAP2
LCo OPTION
PAo
5 10
17
BOOM
A5 P2UNLOAD CYLINDER 3 6 4 1 5 2
PSV-B Ao RIGHT TRAVEL FORWARD
Bo P SE9 P SE10
PAa2 RIGHT TRAVEL REVERSE
MU PBo LEFT TRAVEL FORWARD
TRAVEL PBp1 LEFT TRAVEL REVERSE
A6 PRIORITY P1 BYPASS P2 BYPASS PBp2
PSV-C CUT CUT
A7 P1UNLOAD
PSV-D (T3b) (T3a) (T4a) (Dr4)
(P3) (P4)
17
A8 ARM2
PSV-A
12. PRESSURE RELEASE
T2 P2
13
Lecce Training Centre 5-25
E215B 5 - HYDRAULIC SYSTEM
13. EXTRA (OPTIONAL)
Lecce Training Centre 5-26
E215B 5 - HYDRAULIC SYSTEM
15. NIBBLER&BREAKER
Lecce Training Centre 5-27
E215B 5 - HYDRAULIC SYSTEM
15. QUICK COUPLER
Lecce Training Centre 5-28
E215B 5 - HYDRAULIC SYSTEM
16. SAFETY VALVES
Lecce Training Centre 5-29
Вам также может понравиться
- Report Fluid Friction TestДокумент12 страницReport Fluid Friction TestAbdul Fatah Najmi60% (5)
- Hydraulic System Troubleshooting GuideДокумент13 страницHydraulic System Troubleshooting Guidesaiful100% (1)
- Wheel End Assembly MM1114Документ71 страницаWheel End Assembly MM1114LUKAS100% (1)
- Perkins 400D Series: Models 403D-15, 403D-15T, 404D-22, 404D-22T, and 404D-22TAДокумент51 страницаPerkins 400D Series: Models 403D-15, 403D-15T, 404D-22, 404D-22T, and 404D-22TAJhonatan SernaОценок пока нет
- The Source of Hydraulic PowerДокумент16 страницThe Source of Hydraulic Powersekar507100% (1)
- A House Built On A Riverside...Документ8 страницA House Built On A Riverside...ErsanİmamoğullarıОценок пока нет
- Hydraulic PumpДокумент16 страницHydraulic PumpSandeepNair100% (1)
- Steering SystemДокумент3 страницыSteering SystemShivamKumar100% (1)
- PC210LC-11 SEN06695-01 Swing & Travel SystemsДокумент49 страницPC210LC-11 SEN06695-01 Swing & Travel Systemsdatphuong100% (2)
- Horsepower Gross: 895 KW 1200 HP Net: 879 KW 1178 HP Rated Gross Vehicle Weight (GVW) 163780 KGДокумент16 страницHorsepower Gross: 895 KW 1200 HP Net: 879 KW 1178 HP Rated Gross Vehicle Weight (GVW) 163780 KGAli Imran Alihar100% (1)
- Volume 5 Study of Hydraulic Circuits PDFДокумент64 страницыVolume 5 Study of Hydraulic Circuits PDFnarimene100% (1)
- All MechДокумент76 страницAll MechMichael Gibbs100% (1)
- Kobelco Construction Machinery Co., LTD.: Issue Date: JULY 2006Документ56 страницKobelco Construction Machinery Co., LTD.: Issue Date: JULY 2006ВиталийОценок пока нет
- Alternator Basic Theory: For Generating Electricity We Require Magnet. Relative Motion Between The Two. CoilДокумент13 страницAlternator Basic Theory: For Generating Electricity We Require Magnet. Relative Motion Between The Two. Coilcyyguy3kОценок пока нет
- PISTON ENGINE GeneralupdatedДокумент27 страницPISTON ENGINE GeneralupdatedSamarth SОценок пока нет
- PC 1250 250 HR Service SheetДокумент4 страницыPC 1250 250 HR Service SheetJamyansuren Tseveendorj100% (1)
- Greaves Non-Automotive Engines BrochureДокумент6 страницGreaves Non-Automotive Engines BrochureRicardo TurlaОценок пока нет
- Hydraulic Circuits - Notes - Mar-17Документ159 страницHydraulic Circuits - Notes - Mar-17ahmed abdelkareemОценок пока нет
- Diesel Trade Theory n3 Aug QP 2019Документ6 страницDiesel Trade Theory n3 Aug QP 2019Dennis MbegabolaweОценок пока нет
- 1.3 Basic Hydraulic Symbols and Major ComponentsДокумент31 страница1.3 Basic Hydraulic Symbols and Major Componentsyared admassuОценок пока нет
- Automotive Transmission SystemДокумент94 страницыAutomotive Transmission SystemTanzim Rafat AyonОценок пока нет
- DCVДокумент35 страницDCVTanoj Patro100% (1)
- HHP SystemДокумент17 страницHHP Systemfrenz2kiranОценок пока нет
- Basic Component OF Hydraulic SystemДокумент64 страницыBasic Component OF Hydraulic SystemWalid Houran100% (2)
- On Dynamometer: Prepared byДокумент19 страницOn Dynamometer: Prepared byRaisul Karim RiadОценок пока нет
- 1.2 Hydraulic PrinciplesДокумент48 страниц1.2 Hydraulic PrinciplesAndikaОценок пока нет
- Automotive Electronics PDFДокумент77 страницAutomotive Electronics PDFMaruthiОценок пока нет
- Wa900 8R - Cen00855 00Документ20 страницWa900 8R - Cen00855 00Ahmad Badawi100% (1)
- CH 21 AnswersДокумент26 страницCH 21 AnswersArjav DesaiОценок пока нет
- Azipod XO: The New Generation Azipod Takes Podded Propulsion To A New LevelДокумент6 страницAzipod XO: The New Generation Azipod Takes Podded Propulsion To A New LevelMaricel Hincu100% (1)
- Basic Hydraulic Training ModuleДокумент36 страницBasic Hydraulic Training ModuleVivek Kumar100% (1)
- RLC LaplaceДокумент4 страницыRLC LaplaceharimadhavareddyОценок пока нет
- Pilot Operated Relief Valve ReportdrДокумент2 страницыPilot Operated Relief Valve Reportdrapi-516116252Оценок пока нет
- Structure & Function Lubrication SystemДокумент18 страницStructure & Function Lubrication SystemVikОценок пока нет
- 1 Fluid Power Devices CircuitsДокумент20 страниц1 Fluid Power Devices CircuitshamidouОценок пока нет
- Electrical Machines BookДокумент263 страницыElectrical Machines BookYo Molo MazoОценок пока нет
- Design and Fabrication of Hydraulic Zig Zag Bending MachineДокумент46 страницDesign and Fabrication of Hydraulic Zig Zag Bending MachineAakash DindigulОценок пока нет
- Hydraulics and PneumaticsДокумент30 страницHydraulics and PneumaticsRolando DaclanОценок пока нет
- 26850A005Документ12 страниц26850A005Luciano AlencastroОценок пока нет
- Hydraulic-Training Axial Piston Units Basic PrinciplesДокумент19 страницHydraulic-Training Axial Piston Units Basic PrinciplesRana TalaatОценок пока нет
- Parts of Hydraulic and Pneumatic SystemsДокумент13 страницParts of Hydraulic and Pneumatic Systemsnidhidarklord100% (1)
- Fluid MechanicsДокумент2 страницыFluid MechanicsMariela MarceloОценок пока нет
- UntitledДокумент52 страницыUntitledmoo kong hongОценок пока нет
- 385C and 385C FS Excavator Electrical SystemДокумент4 страницы385C and 385C FS Excavator Electrical SystemNova kurniawan 34Оценок пока нет
- ch06Документ16 страницch06Mahmmod Al-QawasmehОценок пока нет
- Kobelco Wet Type Clutch WinchДокумент5 страницKobelco Wet Type Clutch WinchPHÁT NGUYỄN THẾОценок пока нет
- Understanding VHMS Data - Guidance For Training PAMAДокумент22 страницыUnderstanding VHMS Data - Guidance For Training PAMArio100% (1)
- How Differential WorksДокумент23 страницыHow Differential Worksjohnplaya1234100% (1)
- 1.5 ActuatorsДокумент19 страниц1.5 ActuatorsAndika100% (1)
- ClutchesДокумент76 страницClutchesAravind Lakhan90% (10)
- 3-1. Hydraulic SystemДокумент36 страниц3-1. Hydraulic SystemIBrahym Souiri100% (1)
- Cat Pump Part List 67dx39g1iДокумент4 страницыCat Pump Part List 67dx39g1iJorge M M100% (1)
- Put As An SCR Triggering CKTДокумент6 страницPut As An SCR Triggering CKTGeorgieDominguezAtienza100% (1)
- Fan Starting TorqueДокумент4 страницыFan Starting Torquehardik033Оценок пока нет
- Department of Mechanical Engineering Question Bank 2017 (Regulation) ME8694-Hydraulics and PneumaticsДокумент15 страницDepartment of Mechanical Engineering Question Bank 2017 (Regulation) ME8694-Hydraulics and PneumaticsSC 8D musicОценок пока нет
- Induced Current Produces A Secondary Magnetic Field That Is Always Opposed To The Primary Magnetic Field That Induced It, An Effect CalledДокумент16 страницInduced Current Produces A Secondary Magnetic Field That Is Always Opposed To The Primary Magnetic Field That Induced It, An Effect CalledShaheer MirzaОценок пока нет
- Class 7 Hydraulic CircuitsДокумент57 страницClass 7 Hydraulic Circuitsgeorge_zouridis100% (1)
- PC300-7,8 System Function 201108Документ40 страницPC300-7,8 System Function 201108Cesar Cusii Lazoo100% (13)
- Kaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK HidraulicoДокумент249 страницKaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK Hidraulicosebastian blancoОценок пока нет
- Return To Contents: Fi .6 Neutral Circuit, Lock R L, ATT I R Heavy LH T, FC Mode (Max Flow Cut)Документ6 страницReturn To Contents: Fi .6 Neutral Circuit, Lock R L, ATT I R Heavy LH T, FC Mode (Max Flow Cut)Victor Hugo MezquitaОценок пока нет
- PWR Pressure Control Training Text PP20-24Документ5 страницPWR Pressure Control Training Text PP20-24lassekjaersgaardОценок пока нет
- 1 Basic Hyd CircuitДокумент44 страницы1 Basic Hyd CircuithamidouОценок пока нет
- Complex Engineering Problem: Group Members: Mudassar Javed BMEF17E027 Hamza Kunwar BMEF17E020Документ10 страницComplex Engineering Problem: Group Members: Mudassar Javed BMEF17E027 Hamza Kunwar BMEF17E020Mudassar JavedОценок пока нет
- Arpit BookДокумент45 страницArpit BookRahul SenОценок пока нет
- Open Channel Flow Meter S Formula and DataДокумент79 страницOpen Channel Flow Meter S Formula and DataHector NavarreteОценок пока нет
- Vortex BreakingДокумент7 страницVortex Breakingzorro21072107100% (3)
- Presentation On Reclaimed Rubber PlantДокумент27 страницPresentation On Reclaimed Rubber PlantAwadhesh RanjanОценок пока нет
- AERODYNAMIC NOISE Worksheet InstructionsДокумент6 страницAERODYNAMIC NOISE Worksheet InstructionsMuhammad Adil KhanОценок пока нет
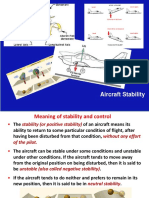
- Aircraft StabilityДокумент21 страницаAircraft StabilityPrasad Chamarajanagar100% (1)
- GS3 Parts Catalog V3.4 ColorДокумент78 страницGS3 Parts Catalog V3.4 ColoryossiatОценок пока нет
- HEC-RAS 5.1 Mud and Debris FlowДокумент34 страницыHEC-RAS 5.1 Mud and Debris FlowFranco VillacortaОценок пока нет
- NPSH Ebook-2018Документ11 страницNPSH Ebook-2018Arnab BhattacharyaОценок пока нет
- Introduction To Gas-Solid Fluidized Bed ReactorsДокумент69 страницIntroduction To Gas-Solid Fluidized Bed ReactorsCandraОценок пока нет
- 1709 07552 PDFДокумент138 страниц1709 07552 PDFSubash UpretyОценок пока нет
- Wind Load Predicting - How Could CFD Replaced Wind Tunnel TestДокумент15 страницWind Load Predicting - How Could CFD Replaced Wind Tunnel TestadiОценок пока нет
- FinFan Technical InfoДокумент15 страницFinFan Technical InfoRoozbeh PОценок пока нет
- Experimental Thermal and Fluid Science: Szu Hsien Liu, Rong Fung Huang, Chuang An LinДокумент11 страницExperimental Thermal and Fluid Science: Szu Hsien Liu, Rong Fung Huang, Chuang An LinAli HusseiniОценок пока нет
- CH16: Adsorption and Ion ExchangeДокумент5 страницCH16: Adsorption and Ion Exchangeangel matienzoОценок пока нет
- Design and Analysis of Low Speed Water Tunnel For Flow Visualization of Bluff BodyДокумент9 страницDesign and Analysis of Low Speed Water Tunnel For Flow Visualization of Bluff BodyTaj AliОценок пока нет
- Supg NS 2DДокумент15 страницSupg NS 2DruОценок пока нет
- Abdul Rahman 2014Документ13 страницAbdul Rahman 2014Hassan ShahОценок пока нет
- Energy Engineering Lab Manual (WEC)Документ74 страницыEnergy Engineering Lab Manual (WEC)haseebОценок пока нет
- RESERVOIR GEOMECHANICS COUPLING - EMI (Autoguardado)Документ49 страницRESERVOIR GEOMECHANICS COUPLING - EMI (Autoguardado)SebastianRomeroBeizagaОценок пока нет
- Parker Spojnice Hidraulika PDFДокумент141 страницаParker Spojnice Hidraulika PDFEdo Nurkanovic50% (2)
- Esp Calculation Data Sheet FinalДокумент15 страницEsp Calculation Data Sheet FinalMohsin ShaikhОценок пока нет
- Italian FeedbackДокумент2 856 страницItalian FeedbackAnkith NaiduОценок пока нет
- Coastal Engineering: Xuebin Chen, Qin Chen, Jiemin Zhan, Don LiuДокумент12 страницCoastal Engineering: Xuebin Chen, Qin Chen, Jiemin Zhan, Don LiukamalОценок пока нет
- Lec 20Документ12 страницLec 20Subrata Kumar DattaОценок пока нет
- Hand Book For Perforated Metal (IPRF - DES)Документ124 страницыHand Book For Perforated Metal (IPRF - DES)laeim017Оценок пока нет
- Truck Mounted Crane Telescop BrochureДокумент9 страницTruck Mounted Crane Telescop BrochureHino Sales IndonesiaОценок пока нет