Вам также может понравиться
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Simulación de circuitos electrónicos con OrCAD® PSpice®От EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Оценок пока нет
- CromatografíaДокумент17 страницCromatografíaGiovanna B100% (5)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОценок пока нет
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoОт EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoРейтинг: 5 из 5 звезд5/5 (1)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiОт EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiРейтинг: 5 из 5 звезд5/5 (1)
- Problemas Propuestos Capitulo 5Документ12 страницProblemas Propuestos Capitulo 5Jenn Charity Bungle71% (7)
- Laboratiorio. Separacion de Aminoacidos Por Cromatografia de PapelДокумент6 страницLaboratiorio. Separacion de Aminoacidos Por Cromatografia de Papelapatriciamr100% (1)
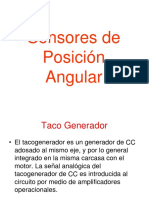
- Revoluciones de Un Motor DCДокумент10 страницRevoluciones de Un Motor DCOscar QuionesОценок пока нет
- Proyectos Con Amplificadores OperacionalesДокумент7 страницProyectos Con Amplificadores OperacionalesCarlos JuanОценок пока нет
- Calculo de Rociadores 2010Документ28 страницCalculo de Rociadores 2010Víctor MosquedaОценок пока нет
- Tratado de ApologeticaДокумент46 страницTratado de ApologeticaOmar RCОценок пока нет
- EncodersДокумент10 страницEncodersFrancisco OrtizОценок пока нет
- Encoder Optico PDFДокумент25 страницEncoder Optico PDFFuerzaRoja25Оценок пока нет
- Sistema HidráulicoДокумент25 страницSistema Hidráulicojoeth100% (3)
- Encoder TeoriaДокумент46 страницEncoder TeoriaCristian Gomez100% (3)
- Informe Reloj DigitalДокумент9 страницInforme Reloj DigitalJavier CarvajalОценок пока нет
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Metodos de Recuperacion Del OroДокумент17 страницMetodos de Recuperacion Del OroManuel Alexis Aguilar ChoquecahuanaОценок пока нет
- Me II 203 Calculo de Bobinados Trifasicos Regulares Marzo 20165Документ22 страницыMe II 203 Calculo de Bobinados Trifasicos Regulares Marzo 20165Raúl Jhonattan Garriazo NuñezОценок пока нет
- Fundamentos de La Extraccion y Refinacion de MineralesДокумент72 страницыFundamentos de La Extraccion y Refinacion de MineralesVictor50% (2)
- Prescripción de Ejercicio Físico para El AcondicionamientoДокумент23 страницыPrescripción de Ejercicio Físico para El AcondicionamientoMartin Pineda100% (1)
- Capacitación - ServoAccionamientos Emerson Control TechniquesДокумент75 страницCapacitación - ServoAccionamientos Emerson Control Techniquesjuan felipe foreroОценок пока нет
- Informe de Termodinamica EspolДокумент13 страницInforme de Termodinamica EspolFrank De la OОценок пока нет
- Circuito ProyectoДокумент8 страницCircuito ProyectoVictor Fabricio Nasimba NОценок пока нет
- Informe 2Документ15 страницInforme 2Fabián CajasОценок пока нет
- Discrete and Microstrip Coupler Design - Chapter 7.en - EsДокумент10 страницDiscrete and Microstrip Coupler Design - Chapter 7.en - EsGabriel Jacobo VanegasОценок пока нет
- Contador DigitalДокумент3 страницыContador DigitalOscar CuevaОценок пока нет
- Práctica 1 - Compuertas Digitales Basicas TTL y El Display de 7 SegmentosДокумент4 страницыPráctica 1 - Compuertas Digitales Basicas TTL y El Display de 7 SegmentosMarco APОценок пока нет
- Lab2 Conttrol Diigtal 20014aДокумент4 страницыLab2 Conttrol Diigtal 20014ajuankha01Оценок пока нет
- Fuente de Alimentacion Con Voltimetro y AmperimetroДокумент20 страницFuente de Alimentacion Con Voltimetro y AmperimetroBrian Apolo PeñalozaОценок пока нет
- TALLER No 3 MAQUINAS ELECTRICAS - MAYO-2020Документ12 страницTALLER No 3 MAQUINAS ELECTRICAS - MAYO-2020JaimeОценок пока нет
- Proyectos Con Amplificadores OperacionalesДокумент7 страницProyectos Con Amplificadores OperacionalesCarlos AlbertoОценок пока нет
- Sensores Angulares-Encoders1 PDFДокумент15 страницSensores Angulares-Encoders1 PDFAnonymous 1tskC3GV8Оценок пока нет
- Acoplador AnilloДокумент10 страницAcoplador Anilloalexander_sócola100% (1)
- Pes Tecnoloxia - GaliciaДокумент8 страницPes Tecnoloxia - GaliciaoscarОценок пока нет
- Encoder SДокумент7 страницEncoder SChaveliv Tiburonov KabronovskyОценок пока нет
- Contador de Objetos en Una Faja TransportadoraДокумент16 страницContador de Objetos en Una Faja TransportadoraJesus Martin Alvarez VasquezОценок пока нет
- Codificadores de PosiciónДокумент8 страницCodificadores de PosiciónFabian Arredondo100% (1)
- Informe AdcДокумент20 страницInforme AdcJouleshans BradleyОценок пока нет
- 8 Sensores de Posicion y AnguloДокумент43 страницы8 Sensores de Posicion y Anguloedgar alexis aparicio amancaОценок пока нет
- Proyectos Con Amplificadores OperacionalesДокумент7 страницProyectos Con Amplificadores OperacionalesAbimaMantServОценок пока нет
- Decodificador BCD A 7 Segmentos 2009Документ6 страницDecodificador BCD A 7 Segmentos 2009Rosario Trejo CerinoОценок пока нет
- Amplificador DiferenciadorДокумент7 страницAmplificador DiferenciadorIvan Txus HernándezОценок пока нет
- Inversor Medio Puente Con IGBTДокумент8 страницInversor Medio Puente Con IGBTRonny Alejandro FuentesОценок пока нет
- SevomotoresДокумент31 страницаSevomotoresUlises QuintanillaОценок пока нет
- ebookRobขticaДокумент15 страницebookRobขticaMarianna ValenAОценок пока нет
- Examen Amplificadores Electronicos Venegas Martinez RobertoДокумент12 страницExamen Amplificadores Electronicos Venegas Martinez RobertoJose Luis Erazo DuranОценок пока нет
- Encoder de CuadraturaДокумент7 страницEncoder de CuadraturaRuddy Gerardo Flores HerreraОценок пока нет
- Informe Accionamiento 1Документ9 страницInforme Accionamiento 1Leonardo Barrera TorresОценок пока нет
- Practica #1 Maquinas de Corriente DirectaДокумент9 страницPractica #1 Maquinas de Corriente DirectaJorge Daniel MercadoОценок пока нет
- Reporte Parcial 2 ElectronicaДокумент22 страницыReporte Parcial 2 ElectronicaLuis Raul LarreynagaОценок пока нет
- Practica 3-Circuito RecortadorДокумент6 страницPractica 3-Circuito RecortadorJona TreviñoОценок пока нет
- Irs 900d 900w Class D JQДокумент10 страницIrs 900d 900w Class D JQJosmar QuinteroОценок пока нет
- Circuito Integrado 555Документ15 страницCircuito Integrado 555Dimas ArguetaОценок пока нет
- Informe Encoder Medidor de RPMДокумент8 страницInforme Encoder Medidor de RPMDaniel Eduardo AnasiОценок пока нет
- Adair Téllez Aviles p3Документ15 страницAdair Téllez Aviles p3Adair TéllezОценок пока нет
- Practica Control Motor Jacobo Hero Omar RobertoДокумент20 страницPractica Control Motor Jacobo Hero Omar RobertoorbedelodoОценок пока нет
- Contador Digital de 0 A 9Документ3 страницыContador Digital de 0 A 9Javier Villarreal100% (1)
- Examen FinalДокумент13 страницExamen FinalGarcia FarcequeОценок пока нет
- Elementos A UtilizarДокумент10 страницElementos A Utilizarisailv18Оценок пока нет
- Informe Proyecto Final Electronica IIДокумент10 страницInforme Proyecto Final Electronica IIJorge TrujilloОценок пока нет
- Informe Seguidor de LineaДокумент27 страницInforme Seguidor de LineamikelkatenaОценок пока нет
- Control de Posicion de Un Motor de CD Con EncoderДокумент6 страницControl de Posicion de Un Motor de CD Con EncoderDewi Hdez GlezОценок пока нет
- Convertidor CD-CDДокумент7 страницConvertidor CD-CDyuvan ramosОценок пока нет
- Lab1 InformeДокумент17 страницLab1 InformeFranklin AntonioОценок пока нет
- Sumador 4 BitsДокумент7 страницSumador 4 BitsViRi ViRiОценок пока нет
- ¿Cómo Hacen Los Profesionales de La Salud Mental para Diagnosticar Los Trastornos?Документ1 страница¿Cómo Hacen Los Profesionales de La Salud Mental para Diagnosticar Los Trastornos?TheHackerОценок пока нет
- ArmonicosДокумент7 страницArmonicosTheHackerОценок пока нет
- PotenciasДокумент1 страницаPotenciasTheHackerОценок пока нет
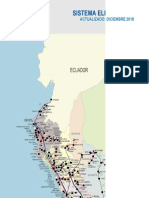
- Líneas Existentes COES 2018Документ3 страницыLíneas Existentes COES 2018TheHackerОценок пока нет
- Gruas para CentralesДокумент1 страницаGruas para CentralesTheHackerОценок пока нет
- Nuevo Documento de Microsoft WordДокумент11 страницNuevo Documento de Microsoft WordTheHacker100% (1)
- Metodo MatricialДокумент9 страницMetodo MatricialKevin JeansОценок пока нет
- Informe de Transferencia de CalorДокумент40 страницInforme de Transferencia de CalorSamuel BrachoОценок пока нет
- Cartografía, Atmósfera, RelievesДокумент27 страницCartografía, Atmósfera, RelievesJosé de la RosaОценок пока нет
- Bases Mecánicas Del Movimiento (Modo de Compatibilidad)Документ65 страницBases Mecánicas Del Movimiento (Modo de Compatibilidad)Valeria Beatriz BarriaGonzalezОценок пока нет
- Taller 1 Ecuaciones Diferenciales - Willian Alexander Vélez Moreno - 084900112020Документ3 страницыTaller 1 Ecuaciones Diferenciales - Willian Alexander Vélez Moreno - 084900112020willianОценок пока нет
- Fisica 10 2P11Документ28 страницFisica 10 2P11Cèsar Eduardo Vásquez Vásquez0% (1)
- @@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFДокумент25 страниц@@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFrami pinanОценок пока нет
- Elaboracion de Yogurt BioДокумент18 страницElaboracion de Yogurt BioSabrina Gutierrez GarciaОценок пока нет
- Examen Oftalmológico EstándarДокумент3 страницыExamen Oftalmológico EstándarWillians BastidasОценок пока нет
- Informe Proyecto CircuitosДокумент19 страницInforme Proyecto CircuitosHenry AlvaradoОценок пока нет
- Centrales Termoeléctricas: Mag. Ing. Wilmer Jara Velásquez Sesión 1Документ20 страницCentrales Termoeléctricas: Mag. Ing. Wilmer Jara Velásquez Sesión 1Jair Cuadros NavarroОценок пока нет
- Estudio General de La Consolidación SecundariaДокумент5 страницEstudio General de La Consolidación SecundariaPaz García BenitoОценок пока нет
- Andrie Marie AmpereДокумент3 страницыAndrie Marie AmpereVeraly CoradoОценок пока нет
- Energia EolicaДокумент12 страницEnergia Eolicavictor mamaniОценок пока нет
- Informe Efecto DopplerДокумент6 страницInforme Efecto DopplerGenerith BolañoОценок пока нет
- Laboratorio Cba N°6Документ7 страницLaboratorio Cba N°6sinexОценок пока нет
- Mat U3 2grado Sesion7Документ9 страницMat U3 2grado Sesion7kjirkasОценок пока нет
- Grupo 5Документ12 страницGrupo 5b18db36536fc0bОценок пока нет
- Modelo Atomico Actual-Numeros Cuanticos-Terminos Espectroscopicos.Документ59 страницModelo Atomico Actual-Numeros Cuanticos-Terminos Espectroscopicos.Augusto Muñoz VillarrealОценок пока нет
- Solucionario Metodos Numericos para Ecuaciones Diferenciales PDFДокумент24 страницыSolucionario Metodos Numericos para Ecuaciones Diferenciales PDFsavageorion5013Оценок пока нет
- b1 Mcs U10 Derivadas Ev SM SolДокумент2 страницыb1 Mcs U10 Derivadas Ev SM SolPeloteros EscarabajosОценок пока нет