Вам также может понравиться
- Decarbonising End-use Sectors: Green Hydrogen CertificationОт EverandDecarbonising End-use Sectors: Green Hydrogen CertificationОценок пока нет
- Results of Competition: Robotics and AI: Inspect, Maintain and Repair in Extreme Environments Competition Code: 1805 - ROBOTICSДокумент11 страницResults of Competition: Robotics and AI: Inspect, Maintain and Repair in Extreme Environments Competition Code: 1805 - ROBOTICSJack PadiОценок пока нет
- Results of Competition: UKART: Fast-Track Collaborative R&D Round 1 Full Stage Competition Code: 1809 - CRD - FT - UKART - R1Документ14 страницResults of Competition: UKART: Fast-Track Collaborative R&D Round 1 Full Stage Competition Code: 1809 - CRD - FT - UKART - R1Jack PadiОценок пока нет
- Results of Competition: Faraday Battery Challenge: Innovation R&D Studies Round 3 Competition Code: 1809 - CRD - MMM - ISCF - FARADAY - R3Документ26 страницResults of Competition: Faraday Battery Challenge: Innovation R&D Studies Round 3 Competition Code: 1809 - CRD - MMM - ISCF - FARADAY - R3Jack PadiОценок пока нет
- Results of Competition: Faraday Battery Challenge: Innovation Feasibility Studies Round 3 Competition Code: 1809 - FS - MMM - ISCF - FARADAY - R3Документ24 страницыResults of Competition: Faraday Battery Challenge: Innovation Feasibility Studies Round 3 Competition Code: 1809 - FS - MMM - ISCF - FARADAY - R3Jack PadiОценок пока нет
- Results of Competition: UKART: Collaborative R&D Round 1 Full Stage Competition Code: 1809 - CRD - UKART - R1Документ8 страницResults of Competition: UKART: Collaborative R&D Round 1 Full Stage Competition Code: 1809 - CRD - UKART - R1Jack PadiОценок пока нет
- Results of Competition: Faraday Battery Challenge: Innovation Feasibility Studies - Round 2 1801 - FS - TRANS - BATTERY - R2Документ14 страницResults of Competition: Faraday Battery Challenge: Innovation Feasibility Studies - Round 2 1801 - FS - TRANS - BATTERY - R2Jack PadiОценок пока нет
- Results of Competition: Electric Vehicle Charging For Public Spaces: Feasibility Studies Competition Code: 1807 - FS - OLEV - ELEC - ST1Документ45 страницResults of Competition: Electric Vehicle Charging For Public Spaces: Feasibility Studies Competition Code: 1807 - FS - OLEV - ELEC - ST1Jack PadiОценок пока нет
- Results of Competition: Smart Local Energy Systems: Concepts and Designs Competition Code: 1804 - ISCF - SMART - ENERGY - DESIGNДокумент26 страницResults of Competition: Smart Local Energy Systems: Concepts and Designs Competition Code: 1804 - ISCF - SMART - ENERGY - DESIGNJack PadiОценок пока нет
- Results of Competition: Commercialising Quantum Devices: Innovation R&D Competition Code: 1804 - CRD - CO - ISCF - QUANTUMДокумент12 страницResults of Competition: Commercialising Quantum Devices: Innovation R&D Competition Code: 1804 - CRD - CO - ISCF - QUANTUMJack PadiОценок пока нет
- Results of Competition: APC 10: Advancing The UK's Low Carbon Automotive Capability Competition Code: 1804 - CRD1 - TRANS - APC10Документ6 страницResults of Competition: APC 10: Advancing The UK's Low Carbon Automotive Capability Competition Code: 1804 - CRD1 - TRANS - APC10Jack PadiОценок пока нет
- Competition Results - Analysis For Innovators Round 3 - Mini Projects Phase 2 PDFДокумент118 страницCompetition Results - Analysis For Innovators Round 3 - Mini Projects Phase 2 PDFJack PadiОценок пока нет
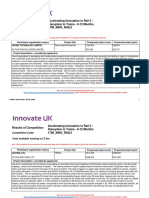
- Results of Competition: Accelerating Innovation in Rail 5 - Disruption To Trains - 0-12 Months 1709 - INNV - RAIL5Документ22 страницыResults of Competition: Accelerating Innovation in Rail 5 - Disruption To Trains - 0-12 Months 1709 - INNV - RAIL5Jack PadiОценок пока нет
- Results of Competition: APC 11: Advancing The UK's Low Carbon Automotive Capability Competition Code: 1808 - CRD1 - TRANS - APC11Документ6 страницResults of Competition: APC 11: Advancing The UK's Low Carbon Automotive Capability Competition Code: 1808 - CRD1 - TRANS - APC11Jack PadiОценок пока нет
- Wireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFДокумент19 страницWireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFJack PadiОценок пока нет
- Results of Competition: Aerospace Technology Institute Batch 26 Competition Code: 1309 - SPEC - TRA - ATI - Batch26Документ16 страницResults of Competition: Aerospace Technology Institute Batch 26 Competition Code: 1309 - SPEC - TRA - ATI - Batch26Jack PadiОценок пока нет
- Results of Competition: Productive and Sustainable Crop and Ruminant Agricultural Systems Competition Code: 1808 - CRD - HLS - AFTFPДокумент51 страницаResults of Competition: Productive and Sustainable Crop and Ruminant Agricultural Systems Competition Code: 1808 - CRD - HLS - AFTFPJack PadiОценок пока нет
- Results of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANДокумент7 страницResults of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANJack PadiОценок пока нет
- Competition Results - Energy Catalyst R6 Transforming Energy Access PDFДокумент36 страницCompetition Results - Energy Catalyst R6 Transforming Energy Access PDFJack PadiОценок пока нет
- Results of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCДокумент19 страницResults of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCJack PadiОценок пока нет
- Results of Competition: Agri-Tech Catalyst Colombia Competition Code: 1804 - AGRITECH - COLOMBIAДокумент14 страницResults of Competition: Agri-Tech Catalyst Colombia Competition Code: 1804 - AGRITECH - COLOMBIAJack PadiОценок пока нет
- Results of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MДокумент32 страницыResults of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MJack PadiОценок пока нет
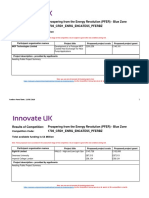
- Results of Competition: Prospering From The Energy Revolution (PFER) - Blue Zone 1703 - CRD1 - ENRG - ENCATES5 - PFERBZДокумент22 страницыResults of Competition: Prospering From The Energy Revolution (PFER) - Blue Zone 1703 - CRD1 - ENRG - ENCATES5 - PFERBZJack PadiОценок пока нет
- Competition Results - Open Grant Funding Competition R3 PDFДокумент102 страницыCompetition Results - Open Grant Funding Competition R3 PDFJack PadiОценок пока нет
- Results of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIДокумент1 страницаResults of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIJack PadiОценок пока нет
- Results of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcДокумент8 страницResults of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcJack PadiОценок пока нет
- Competition Results - ICURe Follow On Funding PDFДокумент12 страницCompetition Results - ICURe Follow On Funding PDFJack PadiОценок пока нет
- Competition Results - Transforming Accountancy With AI Data Large Consortia PDFДокумент8 страницCompetition Results - Transforming Accountancy With AI Data Large Consortia PDFJack PadiОценок пока нет
- Results of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTДокумент10 страницResults of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTJack PadiОценок пока нет
- Competition Results - January 2018 Sector Competition - Strand 2 Emerging and Enabling PDFДокумент83 страницыCompetition Results - January 2018 Sector Competition - Strand 2 Emerging and Enabling PDFJack PadiОценок пока нет
- Competition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFДокумент20 страницCompetition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFJack PadiОценок пока нет
- Results of Competition: UK-Sweden EUREKA Proposals For Aerospace Research and Development Competition Code: 1807 - EURNET - SWEDENДокумент10 страницResults of Competition: UK-Sweden EUREKA Proposals For Aerospace Research and Development Competition Code: 1807 - EURNET - SWEDENJack PadiОценок пока нет
- Results of Competition: Increase Productivity, Performance and Quality in UK Construction Competition Code: 1807 - ISCF - IPPQUKCДокумент52 страницыResults of Competition: Increase Productivity, Performance and Quality in UK Construction Competition Code: 1807 - ISCF - IPPQUKCJack PadiОценок пока нет
- Results of Competition: Icure Follow On Funding Round 4 Competition Code: 1901 - Fs - CRD - Co - Icure - R4Документ6 страницResults of Competition: Icure Follow On Funding Round 4 Competition Code: 1901 - Fs - CRD - Co - Icure - R4Jack PadiОценок пока нет
- Results of Competition: Icure: Open Competition For Spin-Out Companies Competition Code: 1804 - Icure - OpenДокумент12 страницResults of Competition: Icure: Open Competition For Spin-Out Companies Competition Code: 1804 - Icure - OpenJack PadiОценок пока нет
- Results of Competition: Medicines Manufacturing Round 2: Challenge Fund Competition Code: 1803 - ISCF - ASHN - MEDMANR2Документ22 страницыResults of Competition: Medicines Manufacturing Round 2: Challenge Fund Competition Code: 1803 - ISCF - ASHN - MEDMANR2Jack PadiОценок пока нет
- Results of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MДокумент56 страницResults of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MJack PadiОценок пока нет
- Results of Competition: VIA Project Energy Catalyst R5 Late Stage Competition Code: 1810 - CRD - CGI - ECSPECPROДокумент2 страницыResults of Competition: VIA Project Energy Catalyst R5 Late Stage Competition Code: 1810 - CRD - CGI - ECSPECPROJack PadiОценок пока нет
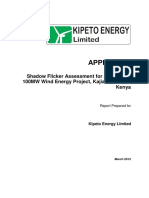
- 16.2.2.16 Appendix K (A) - Shadow FlickerДокумент15 страниц16.2.2.16 Appendix K (A) - Shadow FlickerAbderrazzak AbderrazzakОценок пока нет
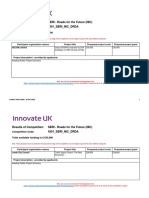
- Results of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDAДокумент5 страницResults of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDAJack PadiОценок пока нет
- Results of Competition: Establishing A Core Innovation Hub To Transform UK Construction Competition Code: 1803 - ISCF - TCCIHДокумент2 страницыResults of Competition: Establishing A Core Innovation Hub To Transform UK Construction Competition Code: 1803 - ISCF - TCCIHJack PadiОценок пока нет
- Results of Competition: Biomedical Catalyst 2018 Round 1 Feasibility Studies Competition Code: 1803 - BMC - R1 - FSДокумент31 страницаResults of Competition: Biomedical Catalyst 2018 Round 1 Feasibility Studies Competition Code: 1803 - BMC - R1 - FSJack PadiОценок пока нет
- Transmission Costs For Offshore WindДокумент28 страницTransmission Costs For Offshore WindUmesh AhirraoОценок пока нет
- Public Disclosure For EIA For 20MW Photovoltaic Power Plant Project in HurghadaДокумент7 страницPublic Disclosure For EIA For 20MW Photovoltaic Power Plant Project in Hurghadamohamed saadОценок пока нет
- ULisboa M50 19mar24Документ36 страницULisboa M50 19mar24JayОценок пока нет
- Results of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MДокумент44 страницыResults of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MJack PadiОценок пока нет
- Corewind Innovations in Integrated Floating Offshore Wind SystemsДокумент53 страницыCorewind Innovations in Integrated Floating Offshore Wind SystemsYetkin MuratОценок пока нет
- Policy Ccs Implementation Presentations 20230330 enДокумент152 страницыPolicy Ccs Implementation Presentations 20230330 enav1986362Оценок пока нет
- 2 67 1634713222 6ijmperddec20216Документ16 страниц2 67 1634713222 6ijmperddec20216TJPRC PublicationsОценок пока нет
- OMAE2021-62281: First Iteration Design of The Flotant ConceptДокумент9 страницOMAE2021-62281: First Iteration Design of The Flotant ConceptJordi SerretОценок пока нет
- Solar PV Power Plant: The Large-ScaleДокумент2 страницыSolar PV Power Plant: The Large-Scalemohamed adamОценок пока нет
- Results of Competition: DCMS Cyber Security Academic Startup Programme Phase 2 1804 - FS - DCMS - CSASP2Документ18 страницResults of Competition: DCMS Cyber Security Academic Startup Programme Phase 2 1804 - FS - DCMS - CSASP2Jack PadiОценок пока нет
- Journals Cost KSOE 2021 061Документ11 страницJournals Cost KSOE 2021 061Claudia Lemos RochaОценок пока нет
- Mr. Sandeep GIZДокумент20 страницMr. Sandeep GIZTamonash JanaОценок пока нет
- Results of Competition: UKRI and Sky Ocean Ventures Plastics Innovation and Investment Fund Competition Code: 1901 - IA - MMM - SKY - SOVPДокумент2 страницыResults of Competition: UKRI and Sky Ocean Ventures Plastics Innovation and Investment Fund Competition Code: 1901 - IA - MMM - SKY - SOVPJack PadiОценок пока нет
- Results of Competition: Digital Health Technology Catalyst Round 3: Collaborative R&D Competition Code: 1809 - CRD - HEAL - DHTC - R3Документ29 страницResults of Competition: Digital Health Technology Catalyst Round 3: Collaborative R&D Competition Code: 1809 - CRD - HEAL - DHTC - R3Jack PadiОценок пока нет
- Planning and Building The First Ultimate Trough Collector Field in The Kingdom of Saudi ArabiaДокумент9 страницPlanning and Building The First Ultimate Trough Collector Field in The Kingdom of Saudi ArabiaElias JamhourОценок пока нет
- Determination of G-Values For Use in SMOGG Gas Generation CalculationsДокумент77 страницDetermination of G-Values For Use in SMOGG Gas Generation CalculationsGaël HenriotОценок пока нет
- Results of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDДокумент26 страницResults of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDJack PadiОценок пока нет
- Osmotic Power at Platts Erem 26012012 Tcm9 19284Документ23 страницыOsmotic Power at Platts Erem 26012012 Tcm9 19284za0642281Оценок пока нет
- Results of Competition: First of A Kind: Demonstrating Tomorrow's Trains Today 1710 - SBRI - FOAK - RAILДокумент17 страницResults of Competition: First of A Kind: Demonstrating Tomorrow's Trains Today 1710 - SBRI - FOAK - RAILJack PadiОценок пока нет
- Results of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIДокумент1 страницаResults of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIJack PadiОценок пока нет
- Results of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MДокумент56 страницResults of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MJack PadiОценок пока нет
- Results of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MДокумент44 страницыResults of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MJack PadiОценок пока нет
- Results of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MДокумент32 страницыResults of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MJack PadiОценок пока нет
- Results of Competition: Increase Productivity, Performance and Quality in UK Construction Competition Code: 1807 - ISCF - IPPQUKCДокумент52 страницыResults of Competition: Increase Productivity, Performance and Quality in UK Construction Competition Code: 1807 - ISCF - IPPQUKCJack PadiОценок пока нет
- Results of Competition: Electric Vehicle Charging For Public Spaces: Feasibility Studies Competition Code: 1807 - FS - OLEV - ELEC - ST1Документ45 страницResults of Competition: Electric Vehicle Charging For Public Spaces: Feasibility Studies Competition Code: 1807 - FS - OLEV - ELEC - ST1Jack PadiОценок пока нет
- Results of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDДокумент26 страницResults of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDJack PadiОценок пока нет
- Results of Competition: Prospering From The Energy Revolution (PFER) - Blue Zone 1703 - CRD1 - ENRG - ENCATES5 - PFERBZДокумент22 страницыResults of Competition: Prospering From The Energy Revolution (PFER) - Blue Zone 1703 - CRD1 - ENRG - ENCATES5 - PFERBZJack PadiОценок пока нет
- Results of Competition: Support For Smes To Evaluate Innovative Medical Technologies 1801 - CRD - Ols - SmeimtДокумент15 страницResults of Competition: Support For Smes To Evaluate Innovative Medical Technologies 1801 - CRD - Ols - SmeimtJack PadiОценок пока нет
- Results of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCДокумент19 страницResults of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCJack PadiОценок пока нет
- Results of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTДокумент10 страницResults of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTJack PadiОценок пока нет
- Design Foundations Round 1 2018 - Competition Results PDFДокумент74 страницыDesign Foundations Round 1 2018 - Competition Results PDFJack PadiОценок пока нет
- Wireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFДокумент19 страницWireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFJack PadiОценок пока нет
- Results of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANДокумент7 страницResults of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANJack PadiОценок пока нет
- Results of Competition: SBRI: Antimicrobial Resistance (AMR) in Humans Competition Code: 1807 - SBRI - ANTIMICROBIALДокумент26 страницResults of Competition: SBRI: Antimicrobial Resistance (AMR) in Humans Competition Code: 1807 - SBRI - ANTIMICROBIALJack PadiОценок пока нет
- Competition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFДокумент20 страницCompetition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFJack PadiОценок пока нет
- Results of Competition: Precision Medicine Technologies: Shaping The Future Competition Code: 1805 - CRD - ASHN - PREC - MEDДокумент39 страницResults of Competition: Precision Medicine Technologies: Shaping The Future Competition Code: 1805 - CRD - ASHN - PREC - MEDJack PadiОценок пока нет
- Results of Competition: Young Innovators' Awards Batch 1 1802 - CRD - YOUNG - INNOV - 1Документ24 страницыResults of Competition: Young Innovators' Awards Batch 1 1802 - CRD - YOUNG - INNOV - 1Jack PadiОценок пока нет
- January 2018 Sector Competition - Strand 1 Health and Life Sciences - Competition Results PDFДокумент63 страницыJanuary 2018 Sector Competition - Strand 1 Health and Life Sciences - Competition Results PDFJack PadiОценок пока нет
- Results of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcДокумент8 страницResults of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcJack PadiОценок пока нет
- Results of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDAДокумент5 страницResults of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDAJack PadiОценок пока нет
- Results of Competition: Innovation Loans: Manufacturing and Materials Readiness Competition Code: 1802 - LOAN - MMДокумент16 страницResults of Competition: Innovation Loans: Manufacturing and Materials Readiness Competition Code: 1802 - LOAN - MMJack PadiОценок пока нет
- Results of Competition: Medicines Manufacturing Round 2: Challenge Fund Competition Code: 1803 - ISCF - ASHN - MEDMANR2Документ22 страницыResults of Competition: Medicines Manufacturing Round 2: Challenge Fund Competition Code: 1803 - ISCF - ASHN - MEDMANR2Jack PadiОценок пока нет
- Results of Competition: Faraday Battery Challenge: Innovation Feasibility Studies - Round 2 1801 - FS - TRANS - BATTERY - R2Документ14 страницResults of Competition: Faraday Battery Challenge: Innovation Feasibility Studies - Round 2 1801 - FS - TRANS - BATTERY - R2Jack PadiОценок пока нет
- Results of Competition: Innovation Loans: Infrastructure Systems 1711 - LOAN - INFRA - FOAKДокумент13 страницResults of Competition: Innovation Loans: Infrastructure Systems 1711 - LOAN - INFRA - FOAKJack PadiОценок пока нет
- Results of Competition: UK-China Collaboration To Tackle Antimicrobial Resistance Competition Code: 1802 - CRD - DH - CHN - AMRДокумент28 страницResults of Competition: UK-China Collaboration To Tackle Antimicrobial Resistance Competition Code: 1802 - CRD - DH - CHN - AMRJack PadiОценок пока нет
- Results of Competition: DCMS Cyber Security Academic Startup Programme Phase 2 1804 - FS - DCMS - CSASP2Документ18 страницResults of Competition: DCMS Cyber Security Academic Startup Programme Phase 2 1804 - FS - DCMS - CSASP2Jack PadiОценок пока нет
- Results of Competition: Women in Innovation 2018 Competition Code: 1806 - WOMEN - IN - INNOVATIONДокумент18 страницResults of Competition: Women in Innovation 2018 Competition Code: 1806 - WOMEN - IN - INNOVATIONJack PadiОценок пока нет
- December 2017 Sector Competition - Open - Competition Results Up - To - 12 - Months PDFДокумент22 страницыDecember 2017 Sector Competition - Open - Competition Results Up - To - 12 - Months PDFJack PadiОценок пока нет
- Ikhlayel 2018Документ41 страницаIkhlayel 2018Biswajit Debnath OffcОценок пока нет
- CAPE Accounting 2010 U2 P1Документ11 страницCAPE Accounting 2010 U2 P1jsjkdnckdfcОценок пока нет
- IRS Document 6209 Manual (2003 Ed.)Документ0 страницIRS Document 6209 Manual (2003 Ed.)iamnumber8Оценок пока нет
- Final ProjectДокумент23 страницыFinal ProjectsahilsardanaОценок пока нет
- Macroeconomics - Assignment IIДокумент6 страницMacroeconomics - Assignment IIRahul Thapa MagarОценок пока нет
- Evio Productions Company ProfileДокумент45 страницEvio Productions Company ProfileObliraj KrishnarajОценок пока нет
- UAS MS NathanaelCahya 115190307Документ2 страницыUAS MS NathanaelCahya 115190307Nathanael CahyaОценок пока нет
- Government Business InterfaceДокумент14 страницGovernment Business InterfaceManoj SharmaОценок пока нет
- Province of AklanДокумент3 страницыProvince of AklanDada N. NahilОценок пока нет
- Global Rum Industry Report 2015Документ5 страницGlobal Rum Industry Report 2015api-282708578Оценок пока нет
- TYS 2007 To 2019 AnswersДокумент380 страницTYS 2007 To 2019 Answersshakthee sivakumarОценок пока нет
- BANK 3009 CVRM Workshop 1 ExercisesДокумент3 страницыBANK 3009 CVRM Workshop 1 Exercisesjon PalОценок пока нет
- Red Bull FinalДокумент28 страницRed Bull FinalYousaf Haroon Yousafzai0% (1)
- Poland Eastern Europe's Economic MiracleДокумент1 страницаPoland Eastern Europe's Economic MiracleJERALDINE CANARIAОценок пока нет
- 617 NP BookletДокумент77 страниц617 NP BookletDexie Cabañelez ManahanОценок пока нет
- Salary Slip (31920472 October, 2017) PDFДокумент1 страницаSalary Slip (31920472 October, 2017) PDFMuhammad Ishaq SonuОценок пока нет
- Askari Aviation Services Marketing ReportДокумент66 страницAskari Aviation Services Marketing Reportsyed usman wazir100% (1)
- Textile Ministry of IndiaДокумент290 страницTextile Ministry of IndiaSrujan KumarОценок пока нет
- BFSI Chronicle 3rd Annual Issue (14th Edition) September 2023Документ132 страницыBFSI Chronicle 3rd Annual Issue (14th Edition) September 2023amanchauhanОценок пока нет
- 9 Ekonomi Kesehatan MateriДокумент51 страница9 Ekonomi Kesehatan MaterialyunusОценок пока нет
- 200400: Company Accounting Topic 3: Accounting For Company Income TaxДокумент15 страниц200400: Company Accounting Topic 3: Accounting For Company Income TaxEhtesham HaqueОценок пока нет
- Rivalry in The Eastern Mediterranean: The Turkish DimensionДокумент6 страницRivalry in The Eastern Mediterranean: The Turkish DimensionGerman Marshall Fund of the United StatesОценок пока нет
- Torres Vs Ventura ReportДокумент2 страницыTorres Vs Ventura ReportRham VillanuevaОценок пока нет
- Market Visit Ing ReportДокумент3 страницыMarket Visit Ing ReportMr. JahirОценок пока нет
- InvoiceДокумент1 страницаInvoicesyed aamiriОценок пока нет
- U.S. Customs Form: CBP Form 7552 - Delivery Certificate For Purposes of DrawbackДокумент2 страницыU.S. Customs Form: CBP Form 7552 - Delivery Certificate For Purposes of DrawbackCustoms FormsОценок пока нет
- Ethiopia Profile Enhanced Final 7th October 2021Документ6 страницEthiopia Profile Enhanced Final 7th October 2021sarra TPIОценок пока нет
- Introduction To GlobalizationДокумент6 страницIntroduction To GlobalizationcharmaineОценок пока нет
- GLOBANT S.A. Globs of Exaggerated Growth and Accounting ShenanigansДокумент26 страницGLOBANT S.A. Globs of Exaggerated Growth and Accounting ShenanigansWarren TrumpОценок пока нет
- Social Game Studies: A Workshop ReportДокумент35 страницSocial Game Studies: A Workshop ReportSebastian Deterding100% (1)
- The PARA Method: Simplify, Organize, and Master Your Digital LifeОт EverandThe PARA Method: Simplify, Organize, and Master Your Digital LifeРейтинг: 5 из 5 звезд5/5 (36)
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityОт EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityРейтинг: 5 из 5 звезд5/5 (1)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldОт EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyОт EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyРейтинг: 3.5 из 5 звезд3.5/5 (111)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyОт EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyРейтинг: 4 из 5 звезд4/5 (51)
- Cyber War: The Next Threat to National Security and What to Do About ItОт EverandCyber War: The Next Threat to National Security and What to Do About ItРейтинг: 3.5 из 5 звезд3.5/5 (66)
- Reality+: Virtual Worlds and the Problems of PhilosophyОт EverandReality+: Virtual Worlds and the Problems of PhilosophyРейтинг: 4 из 5 звезд4/5 (24)
- Generative AI: The Insights You Need from Harvard Business ReviewОт EverandGenerative AI: The Insights You Need from Harvard Business ReviewРейтинг: 4.5 из 5 звезд4.5/5 (2)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОт EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОценок пока нет
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4 из 5 звезд4/5 (6)
- AI Superpowers: China, Silicon Valley, and the New World OrderОт EverandAI Superpowers: China, Silicon Valley, and the New World OrderРейтинг: 4.5 из 5 звезд4.5/5 (398)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldОт EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (107)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОт EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОценок пока нет
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumОт EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumРейтинг: 3 из 5 звезд3/5 (12)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОт EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОценок пока нет
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОт EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОценок пока нет
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeОт EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeРейтинг: 4.5 из 5 звезд4.5/5 (99)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (228)
- The Knowledge: How to Rebuild Our World from ScratchОт EverandThe Knowledge: How to Rebuild Our World from ScratchРейтинг: 3.5 из 5 звезд3.5/5 (133)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОт Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОценок пока нет
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterОт EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterРейтинг: 5 из 5 звезд5/5 (3)