Вам также может понравиться
- Proyecto Carrito Controlado Por BluetoothДокумент11 страницProyecto Carrito Controlado Por Bluetootharturo100% (5)
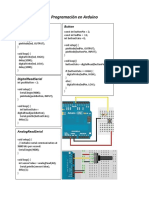
- Programación en ArduinoДокумент34 страницыProgramación en ArduinoJohn Morillo100% (1)
- Memoria Calculo Reservorio 400m3Документ78 страницMemoria Calculo Reservorio 400m3Yinner ValenciaОценок пока нет
- Programas ArduinoДокумент8 страницProgramas Arduinomicha2mcОценок пока нет
- Arquitectura TextilДокумент17 страницArquitectura TextilHeury Gonzalez MatosОценок пока нет
- Peso Específico de La ArenaДокумент4 страницыPeso Específico de La ArenaClaudio Katari100% (4)
- Ig-003 - Instructivo de Perfilado de Taludes y Limpieza de BanquetasДокумент7 страницIg-003 - Instructivo de Perfilado de Taludes y Limpieza de BanquetasElizabeth Tasilla AraujoОценок пока нет
- Accesorios y Equipos de CementacionДокумент11 страницAccesorios y Equipos de CementacionJhon Carlos Aica SotoОценок пока нет
- ArduinoДокумент10 страницArduinogerson perenОценок пока нет
- Program, A Display 7 Segmentos CaseroДокумент8 страницProgram, A Display 7 Segmentos Caserohelmer ruizОценок пока нет
- M1H 287003 281535 272016Документ31 страницаM1H 287003 281535 272016Matías CorvettoОценок пока нет
- Ejercicios ARDUINO 2Документ3 страницыEjercicios ARDUINO 2Eduardo NúñezОценок пока нет
- Ficha 3Документ5 страницFicha 3roures76Оценок пока нет
- Microcontroladores y MicroprocesadoresДокумент10 страницMicrocontroladores y MicroprocesadoresYovany Leon florezОценок пока нет
- Seminario de Arduino Clase 2Документ22 страницыSeminario de Arduino Clase 2Francisco Javier CantoОценок пока нет
- Portafolio Nro 2 - Valeria HoyosДокумент12 страницPortafolio Nro 2 - Valeria HoyosAlejandro Joaquín Bejarano RomeroОценок пока нет
- Utrilla Reyes James AxelДокумент13 страницUtrilla Reyes James AxelLuis AntonioОценок пока нет
- Portafolio N°2Документ14 страницPortafolio N°2Alejandro Joaquín Bejarano RomeroОценок пока нет
- Proyecto Arduino Fin de GradoДокумент13 страницProyecto Arduino Fin de GradoPablo MartinОценок пока нет
- Programacion SumobotДокумент2 страницыProgramacion SumobotJesus Soberon0% (1)
- Arduino Control Car V2 byДокумент7 страницArduino Control Car V2 byedithОценок пока нет
- Programas ArduinoДокумент15 страницProgramas ArduinoDaniel Tenezaca BejaranoОценок пока нет
- Ejercicios en Arduino - Parte 2Документ10 страницEjercicios en Arduino - Parte 2David GalvezОценок пока нет
- Arduino 2Документ4 страницыArduino 2Carlos BaideОценок пока нет
- Arduino Control Car V2 byДокумент7 страницArduino Control Car V2 byJulio Gomez HernándezОценок пока нет
- Diagramas ArduinoДокумент15 страницDiagramas ArduinoJorge Santiago Cartagena RosalesОценок пока нет
- Practicas Electronica DigitalДокумент23 страницыPracticas Electronica DigitalVitore MorleoneОценок пока нет
- Gpai2017b-p04a-Componentes Electronicos Con ArduinoДокумент52 страницыGpai2017b-p04a-Componentes Electronicos Con ArduinoAlexandra EncisoОценок пока нет
- Manual Tecnico IAДокумент6 страницManual Tecnico IAAxel BarahonaОценок пока нет
- AutorДокумент6 страницAutordieguenskyОценок пока нет
- VHDL GuiaДокумент7 страницVHDL GuiaJaime Andres Mondragon GaleanoОценок пока нет
- Robot + Bluetooth +infrarrojoДокумент9 страницRobot + Bluetooth +infrarrojoBlas AdrianОценок пока нет
- Avance de InformeДокумент7 страницAvance de InformeSebastian Cabello MartínezОценок пока нет
- IoT Semaforo PDFДокумент2 страницыIoT Semaforo PDFCentro Evolutivo Del SoftwareОценок пока нет
- IoT Semaforo PDFДокумент2 страницыIoT Semaforo PDFCentro Evolutivo Del SoftwareОценок пока нет
- Lenguaje Electronico 6° 3°Документ4 страницыLenguaje Electronico 6° 3°Stefani TercerosОценок пока нет
- CÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezДокумент2 страницыCÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezFrancisco EmilioОценок пока нет
- Reto 3Документ2 страницыReto 3victor alejandro montalvo floresОценок пока нет
- Proyecto Dutan ArielДокумент14 страницProyecto Dutan ArielAriel DutanОценок пока нет
- E/S Digital: Pinmode (Pin, Mode)Документ7 страницE/S Digital: Pinmode (Pin, Mode)banzorro9029Оценок пока нет
- Programacion Arduino Sistemas de ControlДокумент5 страницProgramacion Arduino Sistemas de ControlTavo ReyesОценок пока нет
- Domótica Con Microcontroladores - 1819Документ12 страницDomótica Con Microcontroladores - 1819epicseventryОценок пока нет
- Control de DirecciónДокумент7 страницControl de DirecciónAbraham RodriguezОценок пока нет
- Leccion PracticaДокумент14 страницLeccion PracticaSevastian HolguinОценок пока нет
- Álgebra de BooleДокумент29 страницÁlgebra de BooleCamila caputoОценок пока нет
- CarroДокумент4 страницыCarroGir EstradaОценок пока нет
- Código Arduino Switch-CaseДокумент2 страницыCódigo Arduino Switch-CaseShania Vicente SánchezОценок пока нет
- ArduinoДокумент6 страницArduinoantonioОценок пока нет
- Programacion de Perro GuardianДокумент2 страницыProgramacion de Perro GuardianJuan Enrique Fernandez ColodroОценок пока нет
- CosasdelpocessingДокумент6 страницCosasdelpocessingCrystian ChavezОценок пока нет
- Ejemplo BàsicoДокумент8 страницEjemplo BàsicoJosé RomeroОценок пока нет
- Programa 1Документ4 страницыPrograma 1LUIS ENRIQUE MENA MENAОценок пока нет
- Informe Caja FuerteДокумент18 страницInforme Caja FuerteDavid Sanchez100% (1)
- Lab 11 - ImДокумент17 страницLab 11 - Imsandy choque matencioОценок пока нет
- Práctica 2 Grupo 2Документ7 страницPráctica 2 Grupo 2Debbie GonzalesОценок пока нет
- Detector de VolcamientoДокумент1 страницаDetector de VolcamientoRicardo Mendez VargasОценок пока нет
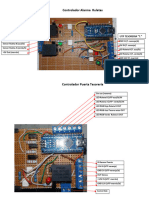
- Controlador Alarma RuletasДокумент6 страницControlador Alarma RuletasMarcelo Estigarribia CymОценок пока нет
- Código para Calculadora en ATmega328PДокумент5 страницCódigo para Calculadora en ATmega328PSebastian Vera MoralesОценок пока нет
- Informe Calculadora PICДокумент7 страницInforme Calculadora PICMaria Jose ArguelloОценок пока нет
- Ejemplos OpenglДокумент9 страницEjemplos Openglalvaro_chang1Оценок пока нет
- Juego de Luces Con ArduinoДокумент6 страницJuego de Luces Con Arduinosamuel ayllon plazaОценок пока нет
- Sistema Transporte Paciente ArduinoДокумент5 страницSistema Transporte Paciente ArduinoRaul PerezОценок пока нет
- Parcial RoboticaДокумент4 страницыParcial RoboticaByron Josel Buitrago MartínezОценок пока нет
- Cinta PVC SilobolsaДокумент1 страницаCinta PVC SilobolsaJuan Angel DechimaОценок пока нет
- Metodologia Del ProyectoДокумент3 страницыMetodologia Del ProyectonicolasОценок пока нет
- Programa de Mantto A TransformadoresДокумент8 страницPrograma de Mantto A TransformadoresJuan de DiosОценок пока нет
- Curvas de TitulacionДокумент1 страницаCurvas de TitulacionEmilio Fernando ContrerasОценок пока нет
- Todo Sobre Ventiladores para Cajas de PCДокумент18 страницTodo Sobre Ventiladores para Cajas de PCjulio lopez herreraОценок пока нет
- LECTURA 2.2.3 Configuración ElectrónicaДокумент5 страницLECTURA 2.2.3 Configuración ElectrónicaBernaMValenzuelaОценок пока нет
- PUENTESДокумент6 страницPUENTESIsai Junior MLОценок пока нет
- TRABAJO GRUPAL Fisica Leyes de NewtonДокумент4 страницыTRABAJO GRUPAL Fisica Leyes de NewtonĐânýîî ŽařatèОценок пока нет
- Levantamiento Con CintaДокумент55 страницLevantamiento Con Cintafranklin CM100% (1)
- TSIA 62ramirez Lopez Et Al 2012 PDFДокумент18 страницTSIA 62ramirez Lopez Et Al 2012 PDFtafeo21Оценок пока нет
- Clima Promedio en SoachaДокумент7 страницClima Promedio en SoachaFelipeGonzalezОценок пока нет
- Caracterizacion de Agua de MinaДокумент35 страницCaracterizacion de Agua de MinaCesar Vallejos MoncadaОценок пока нет
- Salesianos Instituto Técnico Ricaldone Electromecanica Bachillerato TecnicoДокумент20 страницSalesianos Instituto Técnico Ricaldone Electromecanica Bachillerato TecnicoChiito AnnОценок пока нет
- Portafolio de Analisis MatematicoДокумент204 страницыPortafolio de Analisis MatematicoYoxi Silva67% (3)
- El Significado de Los 8 TaeguksДокумент2 страницыEl Significado de Los 8 TaeguksEleazar Brena100% (2)
- Nom 083 SCT1 2002Документ8 страницNom 083 SCT1 2002Roxana Fuentes ColoradoОценок пока нет
- LA TRANSFORMADA DE FOURIER DEL ESCALON UNITARIO PalominoДокумент6 страницLA TRANSFORMADA DE FOURIER DEL ESCALON UNITARIO PalominoAdriana OriundoОценок пока нет
- VCC PPM4 Vehiculos y Equipos MovilesДокумент5 страницVCC PPM4 Vehiculos y Equipos MovilesBrajham Felix Alberto GarayОценок пока нет
- Anexo Documento Decoracion Dureza de CueroДокумент56 страницAnexo Documento Decoracion Dureza de CueroMARY NOMESQUEОценок пока нет
- Elección de Las Redundantes y Planteamiento de La Estructura Primaria PDFДокумент10 страницElección de Las Redundantes y Planteamiento de La Estructura Primaria PDFKIKER MUSIC DJОценок пока нет
- Circuito Electrico 1Документ4 страницыCircuito Electrico 1David Villeda SalinasОценок пока нет
- Resistencia Al Esfuerzo Cortante Del SueloДокумент6 страницResistencia Al Esfuerzo Cortante Del SueloCarlos AzpraОценок пока нет
- CartografiaДокумент36 страницCartografiaJimmy Christian Landa Alvarado100% (2)
- Acople Rigido RWK 500 ESДокумент2 страницыAcople Rigido RWK 500 ESLuisito ChОценок пока нет