Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Kaiser - Electromagnetic Compatibility Handbook - ToCДокумент18 страницKaiser - Electromagnetic Compatibility Handbook - ToCbodymorph20% (5)
- Electrostatics Summary PDFДокумент10 страницElectrostatics Summary PDFKaushal kumarОценок пока нет
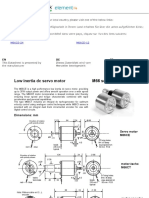
- M66ce-24 M66ce-12Документ6 страницM66ce-24 M66ce-12TECH NEWSОценок пока нет
- ThermodynamicsДокумент83 страницыThermodynamicsRhea BakiОценок пока нет
- Heat NotesДокумент216 страницHeat NotesSaswata Pradhan100% (1)
- Carel PCO3 User ManualДокумент32 страницыCarel PCO3 User ManualToni DlabacОценок пока нет
- Pressure in Fluids QPДокумент9 страницPressure in Fluids QPIbrahim MehmoodОценок пока нет
- Speed QuizДокумент2 страницыSpeed QuizKhairi SharifuddinОценок пока нет
- Solar Sites New EASS DocumentsДокумент11 страницSolar Sites New EASS Documentsi070120100% (1)
- NNSN SD6x8Документ44 страницыNNSN SD6x8Patrice PaulОценок пока нет
- Eti Ohe 16 - 1 94Документ27 страницEti Ohe 16 - 1 94Abhishek Pandey100% (1)
- Module 2 Dynamics Roller Coaster Depth Study 63174ef8a89d4Документ16 страницModule 2 Dynamics Roller Coaster Depth Study 63174ef8a89d4Athul JitheshОценок пока нет
- Fundamentals of Electric Circuits Basic ConceptsДокумент15 страницFundamentals of Electric Circuits Basic ConceptsThiruppathy KesavanОценок пока нет
- Revisi AnggaranДокумент11 страницRevisi Anggaranmas udinОценок пока нет
- 4 André Gretler - ANSI Vs IEC APW ChileДокумент74 страницы4 André Gretler - ANSI Vs IEC APW ChileTopografia MecanicaОценок пока нет
- E101 Lab Report Group 4Документ8 страницE101 Lab Report Group 4Julia LovinoОценок пока нет
- Compliance To Philippine Grid CodeДокумент200 страницCompliance To Philippine Grid CodeEdward NewgateОценок пока нет
- Frequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)Документ40 страницFrequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)pravin patilОценок пока нет
- Flow Through Venturi Tube and Orifice Plate 2021Документ17 страницFlow Through Venturi Tube and Orifice Plate 2021Arief HakeemОценок пока нет
- S5 16003PS0 NS0Документ2 страницыS5 16003PS0 NS0Antonio Solís MurilloОценок пока нет
- ATS48 User ManualДокумент85 страницATS48 User Manualkythuat04 nteОценок пока нет
- Ece III Network Analysis (10es34) NotesДокумент111 страницEce III Network Analysis (10es34) NotesGautam Sharma80% (10)
- Mastering Physics - Vectors Inertia LabДокумент7 страницMastering Physics - Vectors Inertia LabpalparasОценок пока нет
- Switch - Disconnector Base Mounting: 2P - 3P - 3P+NДокумент9 страницSwitch - Disconnector Base Mounting: 2P - 3P - 3P+NVildanОценок пока нет
- CH 15 C 11 Marks 1 and 2 QuesДокумент7 страницCH 15 C 11 Marks 1 and 2 QuesVikrant Shivajirao SambheraoОценок пока нет
- Me 321: Fluid Mechanics-I: Dr. A.B.M. Toufique HasanДокумент12 страницMe 321: Fluid Mechanics-I: Dr. A.B.M. Toufique HasanankitaОценок пока нет
- Inverting Power Supply Using A TPS54202 BuckДокумент25 страницInverting Power Supply Using A TPS54202 Buckg4okkОценок пока нет
- Final ReportДокумент57 страницFinal ReportMian Talha NaveedОценок пока нет
- Protect 8.inv: Industrial InvertersДокумент4 страницыProtect 8.inv: Industrial InvertersMossin SimonОценок пока нет
- NPC Power System Protection PhilosophyДокумент60 страницNPC Power System Protection PhilosophySellappan Muthusamy100% (3)