Вам также может понравиться
- Comparison Between Direct On Line, Star DeltaДокумент6 страницComparison Between Direct On Line, Star DeltaReza Kandhy WindakaОценок пока нет
- Behavior of Induction Motor Due To Voltage Sags and Short InterruptionsДокумент7 страницBehavior of Induction Motor Due To Voltage Sags and Short InterruptionsrafaelantoniomolinaОценок пока нет
- Short Circuit CurrentДокумент6 страницShort Circuit CurrentuplbselesОценок пока нет
- 100107Документ5 страниц100107Vol2No1Оценок пока нет
- Static and Dynamic Models of ImДокумент10 страницStatic and Dynamic Models of Imsajs201100% (1)
- Energy Efficient Electronic Transformer Speed Control for Induction MotorsДокумент6 страницEnergy Efficient Electronic Transformer Speed Control for Induction MotorsJack SquatОценок пока нет
- R.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, EgyptДокумент5 страницR.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, Egyptmarcelo_oliveira_limaОценок пока нет
- Morimoto - Wide Speed Operation of Interior Permanent Magnet Synchronous MotorsДокумент7 страницMorimoto - Wide Speed Operation of Interior Permanent Magnet Synchronous MotorsAnchal SaxenaОценок пока нет
- Feedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropДокумент10 страницFeedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropTrần Tấn LộcОценок пока нет
- Induction Motor Behavior Under Short Interruptions and Voltage SagsДокумент5 страницInduction Motor Behavior Under Short Interruptions and Voltage SagsnadalllabeedОценок пока нет
- Presentation On "Short-Term Voltage Instability: Effects On Synchronous and Induction Machines "Документ20 страницPresentation On "Short-Term Voltage Instability: Effects On Synchronous and Induction Machines "Md Abdul RahemanОценок пока нет
- Calculations and Analysis of Induction Motors Impact Short-Circuit CurrentДокумент4 страницыCalculations and Analysis of Induction Motors Impact Short-Circuit CurrentAbcdОценок пока нет
- Fullppt 181217105921 PDFДокумент123 страницыFullppt 181217105921 PDFC-50 Suyog SawantОценок пока нет
- Voltage Icker Mitigation by FACTS Devices: March 2015Документ7 страницVoltage Icker Mitigation by FACTS Devices: March 2015shehan.defonsekaОценок пока нет
- NTC71 5Документ15 страницNTC71 5Joao LucasОценок пока нет
- EffectДокумент7 страницEffectMohd Faizal AmrilОценок пока нет
- Analysis of Capacitor Switching Inrush CurrentДокумент4 страницыAnalysis of Capacitor Switching Inrush CurrentDavid Aquino GallegosОценок пока нет
- Analysis of Transient Stability of Superconductor Synchronous Generator with Fault Current LimiterДокумент26 страницAnalysis of Transient Stability of Superconductor Synchronous Generator with Fault Current LimiterPedro BenevidesОценок пока нет
- Ijser: Prefluxing Technique To Mitigate Inrush Current of Three-Phase Power TransformerДокумент7 страницIjser: Prefluxing Technique To Mitigate Inrush Current of Three-Phase Power TransformerHendry maysadiputraОценок пока нет
- Shunt Vs Series CompensationДокумент10 страницShunt Vs Series Compensations_banerjeeОценок пока нет
- 2006 International Conference on Power System Technology Overvoltage Analysis and Events in ThailandДокумент7 страниц2006 International Conference on Power System Technology Overvoltage Analysis and Events in ThailandBalajiОценок пока нет
- Modelling and Simulation of Power System of Battery, Solar and Fuel Cell Powered Hybrid Electric VehicleДокумент6 страницModelling and Simulation of Power System of Battery, Solar and Fuel Cell Powered Hybrid Electric VehicleHgoglezОценок пока нет
- KhlghanДокумент8 страницKhlghanali_alfaОценок пока нет
- Analysis of Self Excited Induction Generator Delta Connected Resistive LoadДокумент24 страницыAnalysis of Self Excited Induction Generator Delta Connected Resistive LoadHemant KumarОценок пока нет
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiДокумент10 страниц2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002Оценок пока нет
- FEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultДокумент6 страницFEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultbaradaranhamidОценок пока нет
- Morimoto - Expansion of Operating Limits For Permanent Magnet Motor by Current Vector ControlДокумент6 страницMorimoto - Expansion of Operating Limits For Permanent Magnet Motor by Current Vector ControlAnchal SaxenaОценок пока нет
- Predicting Behavior of Induction Motors During Electrical Service Faults and Momentary Voltage InterruptionsДокумент7 страницPredicting Behavior of Induction Motors During Electrical Service Faults and Momentary Voltage InterruptionsnadalllabeedОценок пока нет
- Space Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/SimulinkДокумент10 страницSpace Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/Simulinklojain centerОценок пока нет
- Electrical Machines 2 Laboratory Paper 2Документ8 страницElectrical Machines 2 Laboratory Paper 2Kent Brian TauthoОценок пока нет
- Proposed Scheme For Plugging Three-Phase Induction Motor: January 2010Документ6 страницProposed Scheme For Plugging Three-Phase Induction Motor: January 2010Bilal HBОценок пока нет
- Inrush Current Reduction in Three Phase Power Transformer by Using Prefluxing TechniqueДокумент10 страницInrush Current Reduction in Three Phase Power Transformer by Using Prefluxing TechniqueIAEME PublicationОценок пока нет
- Performance Analysis of Synchronous Reluctance GeneratorДокумент12 страницPerformance Analysis of Synchronous Reluctance GeneratorIJRASETPublicationsОценок пока нет
- On The Modeling and Control of A Novel Flywheel Energy Storage SystemДокумент7 страницOn The Modeling and Control of A Novel Flywheel Energy Storage SystemSantiago Bonilla RiveraОценок пока нет
- Solly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFДокумент6 страницSolly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFAndysah Putra Utama SiahaanОценок пока нет
- Transformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringДокумент3 страницыTransformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringHukmran HussainОценок пока нет
- Khodapanah2018 Article EstimatingPowerFactorOfInductiДокумент10 страницKhodapanah2018 Article EstimatingPowerFactorOfInductiodracirggОценок пока нет
- Analysis of Automobile Starter Solenoid Switch For Improved LifeДокумент9 страницAnalysis of Automobile Starter Solenoid Switch For Improved LifeManny AnacletoОценок пока нет
- Analysis of Automobile Starter Solenoid Switch For Improved LifeДокумент10 страницAnalysis of Automobile Starter Solenoid Switch For Improved Lifesyed saqibОценок пока нет
- Eigenvalue Analysis of Steady State Stability for a Thermal Power PlantДокумент6 страницEigenvalue Analysis of Steady State Stability for a Thermal Power PlantNithyashriОценок пока нет
- 9470 English TarjomeFaДокумент10 страниц9470 English TarjomeFatusarОценок пока нет
- Inspection of Voltage Sags and Voltage Swells Incident in Power Quality Problems - A ReviewДокумент3 страницыInspection of Voltage Sags and Voltage Swells Incident in Power Quality Problems - A ReviewAnonymous CUPykm6DZОценок пока нет
- Sridhar 2013Документ6 страницSridhar 2013Bobby RinaldiОценок пока нет
- murugesanДокумент10 страницmurugesanTasanandya AyuningtyasОценок пока нет
- Assignment 03 RMДокумент7 страницAssignment 03 RMijazОценок пока нет
- Garg 2014Документ6 страницGarg 2014Deep GandhiОценок пока нет
- Simulation Modelling and Fault Analysis of Switched Reluctance MotorДокумент5 страницSimulation Modelling and Fault Analysis of Switched Reluctance MotorNokhwrang BrahmaОценок пока нет
- Analysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM DrivesДокумент8 страницAnalysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM Drives22dr0302Оценок пока нет
- Reactive Power ControlДокумент183 страницыReactive Power ControlAmberMeerabОценок пока нет
- 1.1. Overview: Power Quality Enhancement Using Dynamic Voltage Restorer (D.V.R)Документ47 страниц1.1. Overview: Power Quality Enhancement Using Dynamic Voltage Restorer (D.V.R)Harsh Vardhan Singh TomarОценок пока нет
- Induction Motor Response To Voltage Dips: By: Arpit Singh Bachelor of Engineering Electrical-3 YearДокумент10 страницInduction Motor Response To Voltage Dips: By: Arpit Singh Bachelor of Engineering Electrical-3 YearAshish SinghОценок пока нет
- Motor Contribution To Three Phase Fault Currents in A Power Intensive Industry With CPP: A Case StudyДокумент4 страницыMotor Contribution To Three Phase Fault Currents in A Power Intensive Industry With CPP: A Case StudyAbcdОценок пока нет
- Asymmetrical Two-Phase Induction Motor Speed Controlled With 4-Leg Voltage Source InverterДокумент6 страницAsymmetrical Two-Phase Induction Motor Speed Controlled With 4-Leg Voltage Source InverterNickОценок пока нет
- Simulation Model For Analysis The Induction Motor Starting Methods in Term of Electrical Power QualityДокумент5 страницSimulation Model For Analysis The Induction Motor Starting Methods in Term of Electrical Power QualityAYB LRNОценок пока нет
- Report On Lecture 38Документ5 страницReport On Lecture 38Surajit SahaОценок пока нет
- Three Phase Statcom For Reactive Power CompensationДокумент25 страницThree Phase Statcom For Reactive Power CompensationPradhunya KambleОценок пока нет
- A Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFДокумент9 страницA Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFsethukumarkОценок пока нет
- Current Transformer, Potential Transformer, LTCT, Low Tension CT, Combined CTPT Unit, Metering Unit, Metering Cubicle, Resin Cast CT, Cast Resin CT, Cast Resin PT, RVT, Residual Voltatge TransformerДокумент12 страницCurrent Transformer, Potential Transformer, LTCT, Low Tension CT, Combined CTPT Unit, Metering Unit, Metering Cubicle, Resin Cast CT, Cast Resin CT, Cast Resin PT, RVT, Residual Voltatge TransformerSharafatОценок пока нет
- Power Systems Modelling and Fault Analysis: Theory and PracticeОт EverandPower Systems Modelling and Fault Analysis: Theory and PracticeРейтинг: 2 из 5 звезд2/5 (1)
- Preliminary Experiments in Comparative Experimental Identification of Six Degree-Of-freedom Coupled Dynamic Plant Models For Underwater Robot VehiclesДокумент8 страницPreliminary Experiments in Comparative Experimental Identification of Six Degree-Of-freedom Coupled Dynamic Plant Models For Underwater Robot VehiclesSuman SahaОценок пока нет
- Modeling and Control of Autonomous Underwater VehiclesДокумент2 страницыModeling and Control of Autonomous Underwater VehiclesSuman SahaОценок пока нет
- Non-Linear Controller For Non-Linear Model of Hovering Autonomous Underwater VehiclesДокумент5 страницNon-Linear Controller For Non-Linear Model of Hovering Autonomous Underwater VehiclesSuman SahaОценок пока нет
- Performance and Stability Analysis of an AUV Guidance SystemДокумент7 страницPerformance and Stability Analysis of an AUV Guidance SystemSuman SahaОценок пока нет
- Research On Simulation Modeling For Small Autonomous Underwater VehicleДокумент8 страницResearch On Simulation Modeling For Small Autonomous Underwater VehicleSuman SahaОценок пока нет
- Design and Motion Control of Autonomous Underwater Vehicle AmoghДокумент9 страницDesign and Motion Control of Autonomous Underwater Vehicle AmoghSuman SahaОценок пока нет
- Steering Control of An Autonomous Underwater Vehicle Using SMC TechniquesДокумент5 страницSteering Control of An Autonomous Underwater Vehicle Using SMC TechniquesSuman SahaОценок пока нет
- Imotus An Autonomous Underwater Resident Vehicle For Vertical ProfilingДокумент5 страницImotus An Autonomous Underwater Resident Vehicle For Vertical ProfilingSuman SahaОценок пока нет
- Hydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesДокумент4 страницыHydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesSuman SahaОценок пока нет
- Depth Control of A High Speed Underwater Vehicle Using Model Predictive ControlДокумент6 страницDepth Control of A High Speed Underwater Vehicle Using Model Predictive ControlSuman SahaОценок пока нет
- Nonlinear Dynamics Performance Prediction of Large AUVДокумент6 страницNonlinear Dynamics Performance Prediction of Large AUVSuman SahaОценок пока нет
- Hydrodynamic Autopilot Design of An AUVДокумент5 страницHydrodynamic Autopilot Design of An AUVSuman SahaОценок пока нет
- 1 s2.0 S2405896316301501 MainДокумент6 страниц1 s2.0 S2405896316301501 MainSuman SahaОценок пока нет
- Adequate Six Degree of Freedom Control of Astable Unmanned Underwater VehiclesДокумент6 страницAdequate Six Degree of Freedom Control of Astable Unmanned Underwater VehiclesSuman SahaОценок пока нет
- PMSM Electric VehicleДокумент95 страницPMSM Electric VehicleHuynh Thanh AnhОценок пока нет
- 2014-03-23 Chapter - ID 24326 7x10Документ33 страницы2014-03-23 Chapter - ID 24326 7x10Suman SahaОценок пока нет
- Development Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVДокумент6 страницDevelopment Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVSuman SahaОценок пока нет
- A Comprehensive Review of Flux Barriers in InterioДокумент14 страницA Comprehensive Review of Flux Barriers in InterioSuman SahaОценок пока нет
- 1765 ArticleText 15686 1 10 20210325Документ14 страниц1765 ArticleText 15686 1 10 20210325Suman SahaОценок пока нет
- Analysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSДокумент4 страницыAnalysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSSuman SahaОценок пока нет
- Underwater Vehicle DynamicsДокумент6 страницUnderwater Vehicle DynamicsIain McCulloch100% (2)
- Dynamic Model and Control of An Autonomous Underwater VehicleДокумент9 страницDynamic Model and Control of An Autonomous Underwater VehicleSuman SahaОценок пока нет
- Preliminary Experiments in Comparative Experimental Identification of Six Degree-Of-freedom Coupled Dynamic Plant Models For Underwater Robot VehiclesДокумент8 страницPreliminary Experiments in Comparative Experimental Identification of Six Degree-Of-freedom Coupled Dynamic Plant Models For Underwater Robot VehiclesSuman SahaОценок пока нет
- Imotus An Autonomous Underwater Resident Vehicle For Vertical ProfilingДокумент5 страницImotus An Autonomous Underwater Resident Vehicle For Vertical ProfilingSuman SahaОценок пока нет
- Hydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesДокумент4 страницыHydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesSuman SahaОценок пока нет
- Performance and Stability Analysis of an AUV Guidance SystemДокумент7 страницPerformance and Stability Analysis of an AUV Guidance SystemSuman SahaОценок пока нет
- Nonlinear Dynamics Performance Prediction of Large AUVДокумент6 страницNonlinear Dynamics Performance Prediction of Large AUVSuman SahaОценок пока нет
- Non-Linear Controller For Non-Linear Model of Hovering Autonomous Underwater VehiclesДокумент5 страницNon-Linear Controller For Non-Linear Model of Hovering Autonomous Underwater VehiclesSuman SahaОценок пока нет
- Research On Simulation Modeling For Small Autonomous Underwater VehicleДокумент8 страницResearch On Simulation Modeling For Small Autonomous Underwater VehicleSuman SahaОценок пока нет
- Modeling and Control of Autonomous Underwater VehiclesДокумент2 страницыModeling and Control of Autonomous Underwater VehiclesSuman SahaОценок пока нет
- Stga High Resolution Strain Gauge Extensometers: FeaturesДокумент2 страницыStga High Resolution Strain Gauge Extensometers: FeaturesSoup PongsakornОценок пока нет
- LeadGuitar Method 2 PDFДокумент69 страницLeadGuitar Method 2 PDFsjlerman100% (2)
- Relationship of Personal Growth Initiative With Self-EfficacyДокумент12 страницRelationship of Personal Growth Initiative With Self-Efficacyeva pandanaОценок пока нет
- H. Bombin and M.A. Martin-Delgado - Exact Topological Quantum Order in D 3 and Beyond: Branyons and Brane-Net CondensatesДокумент17 страницH. Bombin and M.A. Martin-Delgado - Exact Topological Quantum Order in D 3 and Beyond: Branyons and Brane-Net CondensatesMopadDeluxeОценок пока нет
- Physics PP1Документ22 страницыPhysics PP1Tamoya ShirleyОценок пока нет
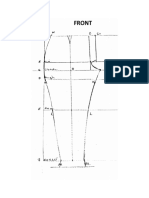
- Measure Front & Back Pants PatternДокумент8 страницMeasure Front & Back Pants PatternAlicia MyersОценок пока нет
- Test Bank For Finance Applications and Theory 5th Edition by Cornett DownloadДокумент54 страницыTest Bank For Finance Applications and Theory 5th Edition by Cornett Downloadtammiedavilaifomqycpes100% (24)
- Sri Lankan Mathematics Competition 2018 April 7, 2018 10:30 Am - 12 NoonДокумент4 страницыSri Lankan Mathematics Competition 2018 April 7, 2018 10:30 Am - 12 NoonV.NawaneethakrishnanОценок пока нет
- Fresh Water Generator On Ships 2Документ16 страницFresh Water Generator On Ships 2Hamilton RamaОценок пока нет
- Fundamentals of The Electromagnetic MethodДокумент8 страницFundamentals of The Electromagnetic MethodEder VacaОценок пока нет
- A Current Carrying Coil Behave Like A MagnetДокумент3 страницыA Current Carrying Coil Behave Like A MagnetAdlin SeedonОценок пока нет
- Fast Formula GuideДокумент96 страницFast Formula GuideRinita BhattacharyaОценок пока нет
- Mean From A Table3Документ1 страницаMean From A Table3Duvall McGregorОценок пока нет
- Active Directory Interview Questions and AnswersДокумент4 страницыActive Directory Interview Questions and AnswersUlaga NathanОценок пока нет
- Level Past Paper Questions - Physics O: TOPIC-24 Elasticity PAPER-1 Multiple ChoiceДокумент4 страницыLevel Past Paper Questions - Physics O: TOPIC-24 Elasticity PAPER-1 Multiple Choiceelty TanОценок пока нет
- A Multi Clustering Method Based On Evolutionary Multi - 2020 - Swarm and EvolutiДокумент12 страницA Multi Clustering Method Based On Evolutionary Multi - 2020 - Swarm and Evolutimohamed albasunyОценок пока нет
- Time PDFДокумент26 страницTime PDFelement1000Оценок пока нет
- Stiffness Matrix MethodДокумент102 страницыStiffness Matrix MethodAkash PaudelОценок пока нет
- Co2 Dragsters Research FolioДокумент19 страницCo2 Dragsters Research Folioapi-299008285Оценок пока нет
- Direct Electrical Arc Ignition of Hybrid Rocket MotorsДокумент91 страницаDirect Electrical Arc Ignition of Hybrid Rocket MotorsHyan GontijoОценок пока нет
- Hydraulic Study (I.e. Discharge Calculations Using Different Methods, Linear Waterway, Scour Depth, Afflux Etc.)Документ31 страницаHydraulic Study (I.e. Discharge Calculations Using Different Methods, Linear Waterway, Scour Depth, Afflux Etc.)Ram Kumar100% (1)
- Halo Carro PDFДокумент5 страницHalo Carro PDFRege PunkОценок пока нет
- Indore Indira School of Career Studies: Sub: Unix Operating System By: Prof. Marie FernandesДокумент49 страницIndore Indira School of Career Studies: Sub: Unix Operating System By: Prof. Marie FernandesMarieFernandesОценок пока нет
- Custommer Billing SystemДокумент12 страницCustommer Billing Systemlalitha lalli100% (1)
- Anexo 04 - Datasheet MódulosДокумент2 страницыAnexo 04 - Datasheet MódulosJoao Vitor FonsecaОценок пока нет
- Cleanroom LED: CR434B LED48/840 PSD W60L60 AC-MLO PIДокумент8 страницCleanroom LED: CR434B LED48/840 PSD W60L60 AC-MLO PIMihaiAnastasiuОценок пока нет
- Cls Jeead-15-16 Xi Mat Target-1 Set-2 Chapter-3Документ174 страницыCls Jeead-15-16 Xi Mat Target-1 Set-2 Chapter-3Sagar Malhotra100% (1)
- Questionbank - DCN 8th Sem 1Документ2 страницыQuestionbank - DCN 8th Sem 1tanuj125Оценок пока нет
- Elance Service Manaual - Rev H PDFДокумент94 страницыElance Service Manaual - Rev H PDFJuanAguileraOlivo67% (3)