Вам также может понравиться
- Sitema Red Can ChevroletДокумент19 страницSitema Red Can ChevroletAndres Gavilanes100% (3)
- Hermenéutica SPДокумент85 страницHermenéutica SPAnonymous j9Kg0J100% (1)
- Baja Cocina Grasa - 333 Ideas de - Peggy SokolowskiДокумент655 страницBaja Cocina Grasa - 333 Ideas de - Peggy SokolowskiJUAN ANTONIO PanzaОценок пока нет
- Reconocimiento de La Ecu de La TrailblazerДокумент16 страницReconocimiento de La Ecu de La TrailblazerCesar AntuinОценок пока нет
- Analizador HidraulicoДокумент8 страницAnalizador HidraulicoSilvio RomanОценок пока нет
- Chevrolet 2.8L 3 PDFДокумент2 страницыChevrolet 2.8L 3 PDFCARLOS CAMACHOОценок пока нет
- Diagnóstico en Redes de ComunicaciónДокумент21 страницаDiagnóstico en Redes de ComunicaciónJonatan MarquezОценок пока нет
- Vdocuments - MX Mercedes PLD 5619751a47c4eДокумент28 страницVdocuments - MX Mercedes PLD 5619751a47c4eAndres Guerrero100% (1)
- C5 AbsДокумент18 страницC5 AbsAbraham CordovasotoОценок пока нет
- Curso Inyeccion Electronica Diesel Emisiones Sistemas Edc Clasificacion Ddec Componentes Sensores Ecm ActuadoresДокумент52 страницыCurso Inyeccion Electronica Diesel Emisiones Sistemas Edc Clasificacion Ddec Componentes Sensores Ecm ActuadoresMarin Marin100% (2)
- Interface OBD2 Con LM327Документ5 страницInterface OBD2 Con LM327Dani-meganeboy100% (1)
- PDF Cambio de Parametros en Motores Detroit - CompressДокумент6 страницPDF Cambio de Parametros en Motores Detroit - CompressEduardoОценок пока нет
- TORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689Документ41 страницаTORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689HEYОценок пока нет
- Ram Control VelocidadДокумент16 страницRam Control VelocidadErick AF LeónОценок пока нет
- 2007 Seat Ibiza 5d 98101Документ284 страницы2007 Seat Ibiza 5d 98101JavierОценок пока нет
- Can y Redes de ComunicaciónДокумент52 страницыCan y Redes de ComunicaciónHappy Mode Naho100% (2)
- Catalogo Sinsatu Octubre 2021Документ35 страницCatalogo Sinsatu Octubre 2021Elmer Tintaya MamaniОценок пока нет
- Electrónica de ControlДокумент29 страницElectrónica de ControlBrayan Ruiz RubioОценок пока нет
- Adición de Circuitos Al Sistema Eléctrico MultiplexadoДокумент4 страницыAdición de Circuitos Al Sistema Eléctrico MultiplexadoCristian MuñozОценок пока нет
- ECM Calibration Download Instructions - En.esДокумент11 страницECM Calibration Download Instructions - En.esheriberto vazquez sosaОценок пока нет
- Nexiq Scanner para Camiones y Maquinaria PesadaДокумент4 страницыNexiq Scanner para Camiones y Maquinaria Pesadayohan jaimes huamanОценок пока нет
- Electronica Aplicada 2011 PDFДокумент102 страницыElectronica Aplicada 2011 PDFanon_340756213Оценок пока нет
- Diccionario de Senales NOMENCLATURASДокумент31 страницаDiccionario de Senales NOMENCLATURASDayronToro100% (1)
- 3 Nociones Básicas MultiplexadoДокумент37 страниц3 Nociones Básicas MultiplexadoJaime Mauricio González GuzmánОценок пока нет
- Nuevas Tacticas de NegociacionДокумент9 страницNuevas Tacticas de NegociacionSesar SolucionesОценок пока нет
- Informe MultiplexadoДокумент12 страницInforme MultiplexadoJJ Ochoa AlvarezОценок пока нет
- Instructivo ZTE A31Документ1 страницаInstructivo ZTE A31Marconis RodriguezОценок пока нет
- Manuales Controles PDFДокумент6 страницManuales Controles PDFJosé Rojas JrОценок пока нет
- Prueba Del Circuito Del Relevador Del Motor deДокумент6 страницPrueba Del Circuito Del Relevador Del Motor deSpectrumRaijinОценок пока нет
- Manual PLD SДокумент85 страницManual PLD SGiovanny Guerra Serna100% (1)
- PracticaДокумент4 страницыPracticaOlga Lucero IllescasОценок пока нет
- Apqd Apqd-421 Material 005Документ76 страницApqd Apqd-421 Material 005Julio cesar Saico condoОценок пока нет
- Sensor IATДокумент8 страницSensor IATDanny Peñafiel100% (1)
- Trabajo Final de Historia Global, La Basura en PanamáДокумент17 страницTrabajo Final de Historia Global, La Basura en PanamáKevin Adames (4you)100% (1)
- Diagramas Logicos Con Simbologia Sama PDFДокумент96 страницDiagramas Logicos Con Simbologia Sama PDFteam_masterОценок пока нет
- 12 - Membranas BiologicasДокумент34 страницы12 - Membranas BiologicasAndres Eloy Perez CandelasОценок пока нет
- Monologo de Napoleon de Andres NeumanДокумент4 страницыMonologo de Napoleon de Andres NeumanMoisés GarcíaОценок пока нет
- Segurudad y Confort AutomotrizДокумент4 страницыSegurudad y Confort AutomotrizHEY0% (1)
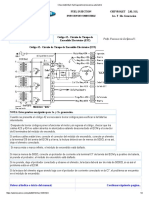
- Codigo 22Документ2 страницыCodigo 22Francisco Javier TorresОценок пока нет
- Arranque de Master Diagnostics Desde La Pantalla de WindowsДокумент27 страницArranque de Master Diagnostics Desde La Pantalla de WindowsJohn MkCito KIОценок пока нет
- Transformación de Datos en Información (5a)Документ6 страницTransformación de Datos en Información (5a)Jose Manuel Nuñez BelloОценок пока нет
- DDX417 BTДокумент96 страницDDX417 BTPimivan PimivanОценок пока нет
- 3 Sistema de CombustibleДокумент13 страниц3 Sistema de CombustibleEnzo Miguel Sarabia MontesОценок пока нет
- Medicion J1939Документ7 страницMedicion J1939RicardoОценок пока нет
- Sistema de Enfriamiento de Un Motor DieselДокумент53 страницыSistema de Enfriamiento de Un Motor DieselEdmur Gallegos CondoriОценок пока нет
- SinParar08 PDFДокумент16 страницSinParar08 PDFtipo3331Оценок пока нет
- Genisys 2009 Spanish ManualДокумент88 страницGenisys 2009 Spanish ManualLuisFe Pérez100% (1)
- EdcДокумент52 страницыEdcWilliam Alexander Pinto VásquezОценок пока нет
- Servicios Semsa La RotondaДокумент20 страницServicios Semsa La Rotondacarlos maradiagaОценок пока нет
- Como Conectar ParlanteДокумент13 страницComo Conectar ParlanteDanilo TorresОценок пока нет
- Manual de Instalacion Detroid DDDL 8.0Документ11 страницManual de Instalacion Detroid DDDL 8.0Fidel MachadoОценок пока нет
- ElectrónicaДокумент15 страницElectrónicaChristian Fabricio Aguilar HuarachiОценок пока нет
- Todos Los Radios de La Marca Eclipse Tienen Una Característica Llamada ESNДокумент3 страницыTodos Los Radios de La Marca Eclipse Tienen Una Característica Llamada ESNjr100100Оценок пока нет
- PDF Como Recalibrar Ecm Isxismsig1 DDДокумент2 страницыPDF Como Recalibrar Ecm Isxismsig1 DDJose nicolas Perez VasquezОценок пока нет
- m2 Modulos Codigos de FallasДокумент54 страницыm2 Modulos Codigos de Fallasgustavo0% (1)
- Hyper TerminalДокумент3 страницыHyper TerminalAnitaОценок пока нет
- EléctricoДокумент10 страницEléctricokevin jimenez paezОценок пока нет
- Manual de Motor VT 275 DiagnosticoДокумент1 страницаManual de Motor VT 275 DiagnosticoKarinaОценок пока нет
- Instructivo para Realizar Cambio Del Parametro de Torque en Variador Powerflex 7000 Faja 292500-Cv-002Документ10 страницInstructivo para Realizar Cambio Del Parametro de Torque en Variador Powerflex 7000 Faja 292500-Cv-002Luis AcpОценок пока нет
- Familia de Los MotoresДокумент26 страницFamilia de Los MotorespipewilliОценок пока нет
- 1 Guía de Fallas de Cojinetes de La Plataforma DDДокумент2 страницы1 Guía de Fallas de Cojinetes de La Plataforma DDYelber Calcina CalcinaОценок пока нет
- Serve MaxxДокумент3 страницыServe MaxxGerman Vera VeraОценок пока нет
- Drive Tips Cummins IsxДокумент6 страницDrive Tips Cummins Isxsergio perezcastanedaОценок пока нет
- 2019 GMC Terrain Model Overview Manual PropietarioДокумент483 страницы2019 GMC Terrain Model Overview Manual Propietariokegresse100% (1)
- Gases de Escape y Empleo de ObdДокумент18 страницGases de Escape y Empleo de ObdDIONYBLINKОценок пока нет
- Hoja de Comprobación para Cambios DUONIC - ES - XXXДокумент10 страницHoja de Comprobación para Cambios DUONIC - ES - XXXFrancisco Juan Diaz MiraОценок пока нет
- Redes Multiplexadas 3.0Документ21 страницаRedes Multiplexadas 3.0Mauricio ZentenoОценок пока нет
- Cap - 29 Equipo de Prueba y Afinacion Del MotorДокумент14 страницCap - 29 Equipo de Prueba y Afinacion Del MotorHEYОценок пока нет
- Cap - 24 Sistemas Electronicos de Inyeccion de CombustibleДокумент17 страницCap - 24 Sistemas Electronicos de Inyeccion de CombustibleHEYОценок пока нет
- Bomba Rotativas FinalДокумент26 страницBomba Rotativas FinalHEYОценок пока нет
- Sistema Antibloqueo de Ruedas: C.F.P.V./2003Документ33 страницыSistema Antibloqueo de Ruedas: C.F.P.V./2003HEYОценок пока нет
- Cap - 26 Supercargadores y Turbo CargadoresДокумент13 страницCap - 26 Supercargadores y Turbo CargadoresHEYОценок пока нет
- Cap - 23 Sistema de Combustible Carburado Diagnostico y ServicioДокумент11 страницCap - 23 Sistema de Combustible Carburado Diagnostico y ServicioHEYОценок пока нет
- Cap - 21diagnostico y Servicio Del Sistema de EncendidoДокумент17 страницCap - 21diagnostico y Servicio Del Sistema de EncendidoHEYОценок пока нет
- Cap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleДокумент16 страницCap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleHEYОценок пока нет
- Cap - 19 Fundamentos de Los Sistemas de EncendidoДокумент11 страницCap - 19 Fundamentos de Los Sistemas de EncendidoHEYОценок пока нет
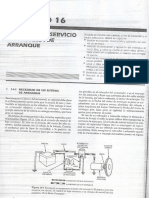
- CAP - 16 Operacion Del Sistema de ArranqueДокумент16 страницCAP - 16 Operacion Del Sistema de ArranqueHEYОценок пока нет
- Cap - 7 Mediciones y Rendimiento Del MotorДокумент10 страницCap - 7 Mediciones y Rendimiento Del MotorHEYОценок пока нет
- Cap - 17 Operacion Yservicio Del Sistema de CargaДокумент17 страницCap - 17 Operacion Yservicio Del Sistema de CargaHEY100% (1)
- Cap - 14 Sistemas Electricos y Electronicos Del AutomovilДокумент14 страницCap - 14 Sistemas Electricos y Electronicos Del AutomovilHEYОценок пока нет
- Cap - 12 Sistemas de Enfriamiento Del MotorДокумент14 страницCap - 12 Sistemas de Enfriamiento Del MotorHEY100% (1)
- Cap - 20 Sistemas de Encendido ElectronicoДокумент13 страницCap - 20 Sistemas de Encendido ElectronicoHEYОценок пока нет
- Cap - 15 Construccion y Servicios de La BateriasДокумент11 страницCap - 15 Construccion y Servicios de La BateriasHEYОценок пока нет
- Cap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorДокумент14 страницCap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorHEYОценок пока нет
- Cap - 10 Servicio Al Sistema de Combustible y de EscapeДокумент16 страницCap - 10 Servicio Al Sistema de Combustible y de EscapeHEYОценок пока нет
- Geometria de La AlineacionДокумент29 страницGeometria de La AlineacionHEYОценок пока нет
- Cap - 3informacion Del Trabajo y Servicio Del TallerДокумент9 страницCap - 3informacion Del Trabajo y Servicio Del TallerHEYОценок пока нет
- Cap - 5 Tipos y Clasificasiones de Los MotoresДокумент16 страницCap - 5 Tipos y Clasificasiones de Los MotoresHEYОценок пока нет
- ANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoДокумент3 страницыANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoHEYОценок пока нет
- Trasmisión de Potencia y FrenosДокумент172 страницыTrasmisión de Potencia y FrenosHEYОценок пока нет
- ANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoДокумент3 страницыANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoHEYОценок пока нет
- Carroceria y Lunas AutosДокумент22 страницыCarroceria y Lunas AutosHEY100% (1)
- Informe Rafael Diaz EsrfДокумент18 страницInforme Rafael Diaz EsrfRAFAEL DIAZ ROJASОценок пока нет
- Actividad 4 Sistema de Vigil EpiДокумент12 страницActividad 4 Sistema de Vigil EpiKatherine GОценок пока нет
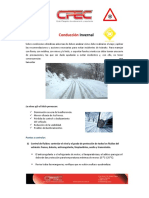
- Recomendaciónes para Conducción InvernalДокумент12 страницRecomendaciónes para Conducción InvernalCarlos Alberto LERTORAОценок пока нет
- Baines, Los Estados Unidos de AméricaДокумент60 страницBaines, Los Estados Unidos de AméricaRomina OmariniОценок пока нет
- 4.1 Cuadro de PunnettДокумент2 страницы4.1 Cuadro de PunnettLiliana HernándezОценок пока нет
- Leonardo Gori - Los Huesos de DiosДокумент238 страницLeonardo Gori - Los Huesos de DiosValentina PrietoОценок пока нет
- Introducción (Antecedentes I) EjemploДокумент5 страницIntroducción (Antecedentes I) EjemploCarmen ArgüellesОценок пока нет
- Regulacion EcДокумент1 страницаRegulacion Ecaquiles bailoОценок пока нет
- Fepba 2019 La Liga DocenteДокумент24 страницыFepba 2019 La Liga DocenteNoelia BelizanОценок пока нет
- Ejercicio 2Документ14 страницEjercicio 2Julio Palomino Blanco83% (6)
- Dist en Empresa Agro PDFДокумент70 страницDist en Empresa Agro PDFCarlos Andres Perez VargasОценок пока нет
- Introducción A La Administración Del TransporteДокумент15 страницIntroducción A La Administración Del Transportedoris100% (1)
- Boe A 2012 12326Документ6 страницBoe A 2012 12326Jose YoshОценок пока нет
- ACTIVIDAD COMPLEMENTARIA No. 2 DE ADMINISTRACION FINANCIERAДокумент14 страницACTIVIDAD COMPLEMENTARIA No. 2 DE ADMINISTRACION FINANCIERAMartha Lucia Tovar100% (1)
- Determinación de Sólidos Totales en Biomasa y Sólidos Disueltos Totales en Procesos Líquidos MuestrasДокумент9 страницDeterminación de Sólidos Totales en Biomasa y Sólidos Disueltos Totales en Procesos Líquidos MuestrasAngie Estefania Rivera CordobaОценок пока нет
- Dieciocho Maneras de Preparar El Cerdo Navideño PirateadoДокумент10 страницDieciocho Maneras de Preparar El Cerdo Navideño PirateadoIsrael GPОценок пока нет
- Cuadernillo Camareras de Piso Low PDFДокумент76 страницCuadernillo Camareras de Piso Low PDFMars HeimdalОценок пока нет
- Cov.r.01 Protocolo Atención Emergencia Ante Pandemia Covid19Документ26 страницCov.r.01 Protocolo Atención Emergencia Ante Pandemia Covid19egradosmОценок пока нет
- 2021 08 Boleta para Solicitar Carne de Trabajador 20210802-1628026562-728074156Документ1 страница2021 08 Boleta para Solicitar Carne de Trabajador 20210802-1628026562-728074156Linda RuízОценок пока нет
- Avance3 ProyectoFinalДокумент52 страницыAvance3 ProyectoFinalrodrigo carlosОценок пока нет
- Alexandra Cusi Valle - Resumen Del Capitulo 1 y 2Документ20 страницAlexandra Cusi Valle - Resumen Del Capitulo 1 y 2Alecita Cusi ValleОценок пока нет
- Ecuaciones Diferenciales (Capitulo 2)Документ90 страницEcuaciones Diferenciales (Capitulo 2)Carlos MenéndezОценок пока нет
- Ingenieria de Requerimientos EJEMPLOДокумент44 страницыIngenieria de Requerimientos EJEMPLOLuis Francisco Garcia SoteloОценок пока нет
- 2015-03-06 Tdrs Terminal MacasДокумент48 страниц2015-03-06 Tdrs Terminal MacasmarcoОценок пока нет